Peter Corke Robotics:MATLAB附录,涵盖视觉与控制基础算法
需积分: 10 105 浏览量
更新于2024-07-19
收藏 3.41MB PDF 举报
在"Robotics: Vision and Control - Fundamental Algorithms in MATLAB英文版"的第17章-附录中,作者Peter Corke提供了丰富的附加内容,以支持读者对机器人学、机器视觉和机器人控制领域的深入理解。本书不仅涵盖了广泛的主题,如工业机器人、移动机器人和飞行器技术,还包括MATLAB机器人工具箱和机器视觉工具箱的实用示例代码,是机器人入门学习者和专业人士的理想参考资料。
附录部分包含了详细的安装指南(Appendix A),帮助读者正确安装这两个重要的工具箱,确保软件环境的兼容性和高效运行。Simulink®(Appendix B)部分介绍了如何在Simulink环境下构建和模拟机器人系统,这对于设计复杂控制系统至关重要。Matlab®Objects(Appendix C)则概述了与MATLAB交互的关键对象和数据结构,方便用户编写高效且易于维护的代码。
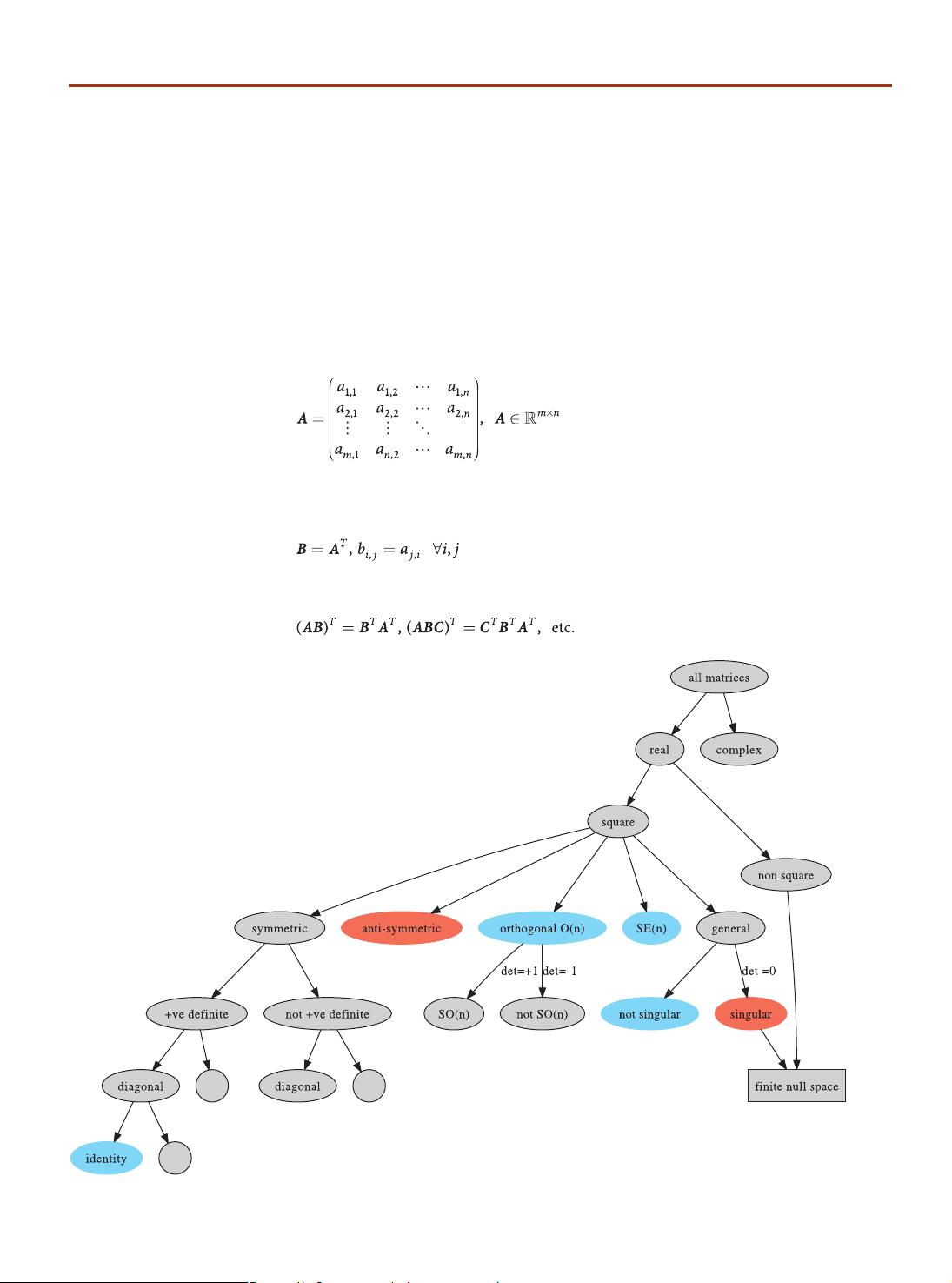
数学基础知识在附录中也得到了强调,如线性代数复习(Appendix D)、椭圆理论(Appendix E)、高斯随机变量(Appendix F)以及雅可比矩阵的处理(Appendix G)。这些概念对于理解机器人运动学和动力学模型至关重要。Kalman滤波(Appendix H)是一种强大的状态估计方法,在机器人导航和控制系统中应用广泛。
另一个重要的附录是关于齐次坐标(Appendix I),这是一种在三维空间中表示物体位置和姿态的标准方法,对于计算机图形学和机器人定位非常有用。图论(Appendix J)则涉及网络分析和路径规划,为解决复杂的机器人路径规划问题提供理论基础。
图像处理中的峰值检测(Appendix K)是机器视觉中的核心任务之一,它在目标检测和跟踪中扮演着关键角色。此外,附录还提供了一个链接到书的官方网站(http://www.petercorke.com/RVC),该网站包含更多相关资料,如额外的网页链接、代码、插图、习题解答和勘误表。
最后,附录详细说明了如何下载打包的工具箱文件,包括gzip tar格式(rvtb.gz)和zip格式(rvtb.zip),确保用户能够方便地获取所有资源并进行实际操作。这些工具箱文件被存放在rvctools目录下,分为机器人(robot)、机器视觉(vision)、通用公用函数(common)、Simulink®模块和第三方贡献代码(contrib)等子目录。
第17章的附录内容丰富,不仅涵盖了实用工具的安装和使用,还提供了深入的数学原理和技术细节,是机器人和机器视觉领域学习者不可或缺的补充资源。通过结合书中的理论知识和附录提供的实操指导,读者可以全面掌握机器人控制和视觉处理的核心技能。
509
MATLAB® supports virtual properties which are defined in the quaternion imple-
mentation by
properties (Dependent = true)
R % rotation matrix
T % translation matrix
end
These two properties can be accessed like normal properties, for example q.R or q.T.
However when accessed they invoke the methods get.R and get.T respectively.
The implementation for get.R
function r = get.R(q)
r = t2r( q2tr(q) );
end
converts the quaternion to a homogeneous transformation and then to an orthonor-
mal rotation matrix.
MATLAB® classes support inheritance. This is a feature whereby a new class can
inherit the properties and methods of an existing class and extend that with addi-
tional properties or methods. In Part II the various planners such as Dstar and RRT
inherit from the class Navigation and in Part IV the different types of camera such
as CentralCamera and FishEyeCamera inherit from the class Camera. Inherit-
ance is indicated at the classdef line, for example
classdef Dstar < Navigation
Inhertitance, particularly multiple inheritance, is a complex topic and the MATLAB®
documentation should be referred to for the details.
The MATLAB® functions methods and properties return the methods and
properties of an object. The function metaclass returns a data structure that in-
cludes all methods, properties and parent classes.
Pass by Reference
One particularly useful application of inheritance is to get around the problem of
pass by value. Whenever a variable is passed to a function MATLAB® passes its value,
that is a copy of it, rather than a reference to it. This is normally quite convenient, but
consider now the case of some object which has a method that changes a property. If
we write
>> myobj.set_x(2);
then MATLAB® creates a copy of the object myobj and invokes the set_x() method
on the copy. However since we didn’t assign the copied object to anything the change
is lost. The correct approach is to write this as
>> myobj = myobj.set_x(2);
which is cumbersome. If however the object myobj belongs to a reference class then
we can write
>> myobj.set_x(2);
and the value of myobj would change. To create a reference class the class must in-
herit from the handle class
classdef MyClass < handle
A number of classes within the Toolbox, but not the Quaternion class, are refer-
ence classes. A possible trap with reference classes is that an assignment of a reference
class object
Appendix C · Matlab® Objects


剩余70页未读,继续阅读
184 浏览量
153 浏览量
2018-03-06 上传
196 浏览量
181 浏览量
129 浏览量
161 浏览量
2018-03-06 上传
319 浏览量

qq_14903801
- 粉丝: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- Vue.js波纹效果组件:Vue-Touch-Ripple使用教程
- VHDL与Verilog代码转换实用工具介绍
- 探索Android AppCompat库:兼容性支持与Java编程
- 探索Swift中的WBLoadingIndicatorView动画封装技术
- dwz后台实例:全面展示dwz控件使用方法
- FoodCMS: 一站式食品信息和搜索解决方案
- 光立方制作教程:雨滴特效与呼吸灯效果
- mybatisTool高效代码生成工具包发布
- Android Graphics 绘图技巧与实践解析
- 1998版GMP自检评定标准的回顾与方法
- 阻容参数快速计算工具-硬件设计计算器
- 基于Java和MySQL的通讯录管理系统开发教程
- 基于JSP和JavaBean的学生选课系统实现
- 全面的数字电路基础大学课件介绍
- WagtailClassSetter停更:Hallo.js编辑器类设置器使用指南
- PCB线路板电镀槽尺寸核算方法详解
