四自由度棒料搬运机械手设计与应用
版权申诉
124 浏览量
更新于2024-07-01
收藏 1.08MB DOCX 举报
"棒料搬运机械手设计文档详细介绍了四自由度圆柱坐标型工业机械手的设计,该机械手主要用于搬运质量小于2KG、直径小于60mm的圆形棒料,旨在提高生产效率、产品质量和经济效益,同时减轻工人的劳动强度。在控制器的指挥下,机械手能够完成棒料在流水线之间的转移以及翻转作业。"
本文档深入探讨了棒料搬运机械手的设计原理和应用背景。随着社会的发展和科技的进步,机器人技术在工业领域的应用日益广泛,它们能够替代人力进行重复性、高强度的工作,从而释放人力资源,让人们从繁重的体力劳动中解脱出来。在工业自动化进程中,机器人扮演着重要角色,尤其是在那些环境恶劣或对人体有害的工作环境中。
本设计的机械手属于四自由度圆柱坐标型,这意味着它可以沿两个直线轴和两个旋转轴进行运动,具备较高的灵活性。这种设计适用于搬运特定尺寸的棒料,如质量不超过2公斤、直径小于60毫米的圆形棒料。通过更换不同的气爪手指,机械手可以适应不同直径的棒料,实现多样化搬运任务。
控制器作为机械手的核心部分,负责协调各个关节的动作,确保机械手精确地从一个流水线取料,然后将其移动到另一个流水线,并能完成工件的翻转操作。这样的功能对于生产线上的物料传输尤其有用,可以显著提升工作效率,减少人为错误,同时降低工人的劳动强度。
关键词所强调的"四自由度"是指机械手的运动维度,"机械手"是主要研究对象,"搬运"是其主要任务,而"工业机器人"则表明了该设计在现代工业自动化中的定位。整体来看,这个设计体现了现代工业自动化和机器人技术的结合,为制造业提供了一种高效、安全的解决方案。
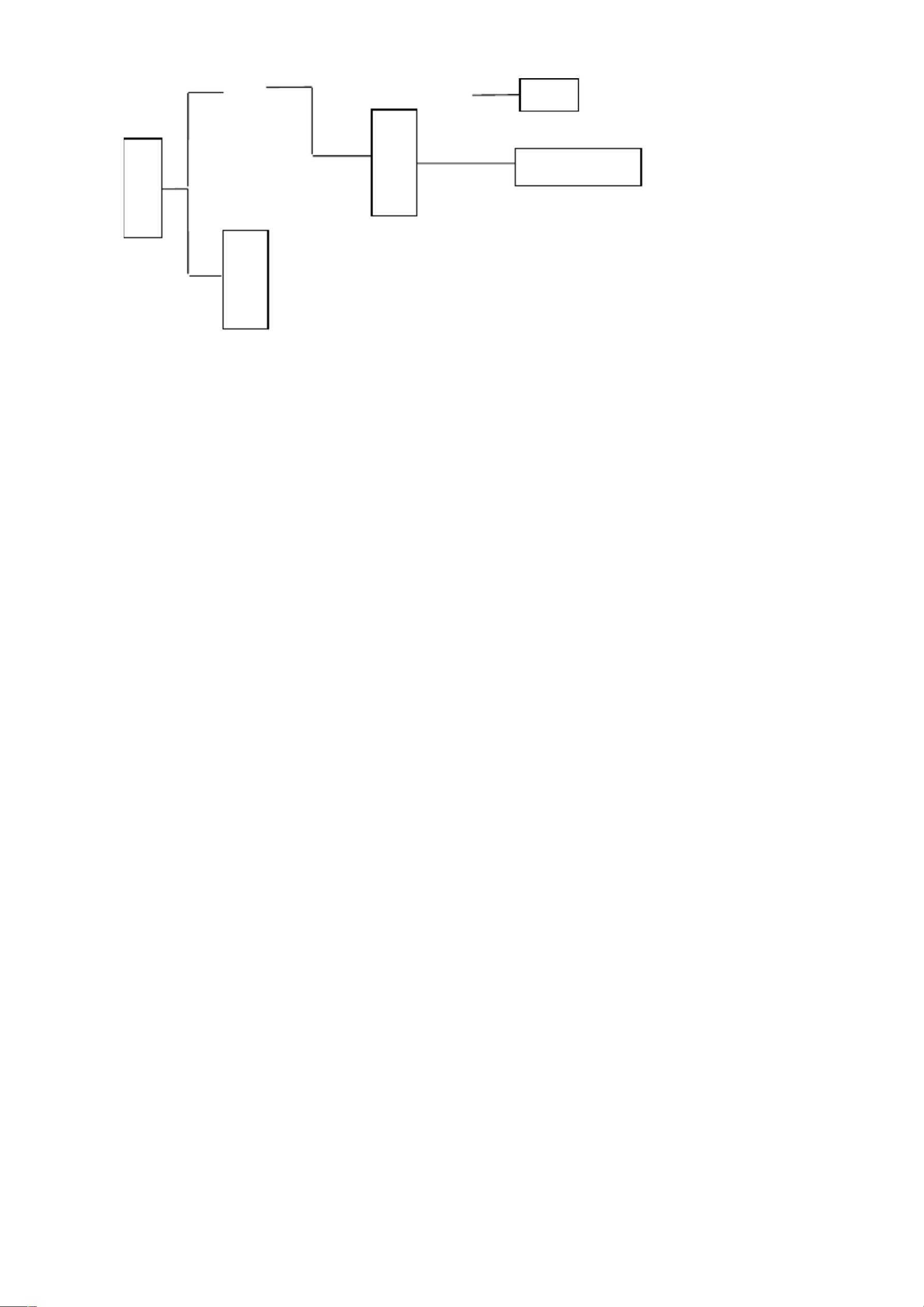
底座
驱
动
机
构
机
械
手
电器混合驱动
系
图 2.1 机械手的组成图
本机械手由机械系统(执行系统、驱动系统)、控制检测系统组成。
机械系统:
1.执行系统:执行系统是工业机器人完成抓取工件,实现各种运动所必需的机械部件,
它包括气爪、手臂升降、手臂伸缩、底座旋转。
2.驱动系统:为执行系统各部件提供动力,并驱动其动力的装置。本设计选用机械传动、
气压传动和电机驱动。
控制系统:
通过对驱动系统的控制,使执行系统按照规定的要求进行工作,当发生错误或故障时
发出报警信号。
2.3 总方案的拟定
由设计要求本设计机械手实现的作用:自动线上有A,B两条输送带,之间距离为
0.7m,现设计机械手将一棒料工件从 A 带送到 B 带并将棒料翻转过来。
确定为四自由度的机械手。其中 2 个为旋转,2 个为平移。
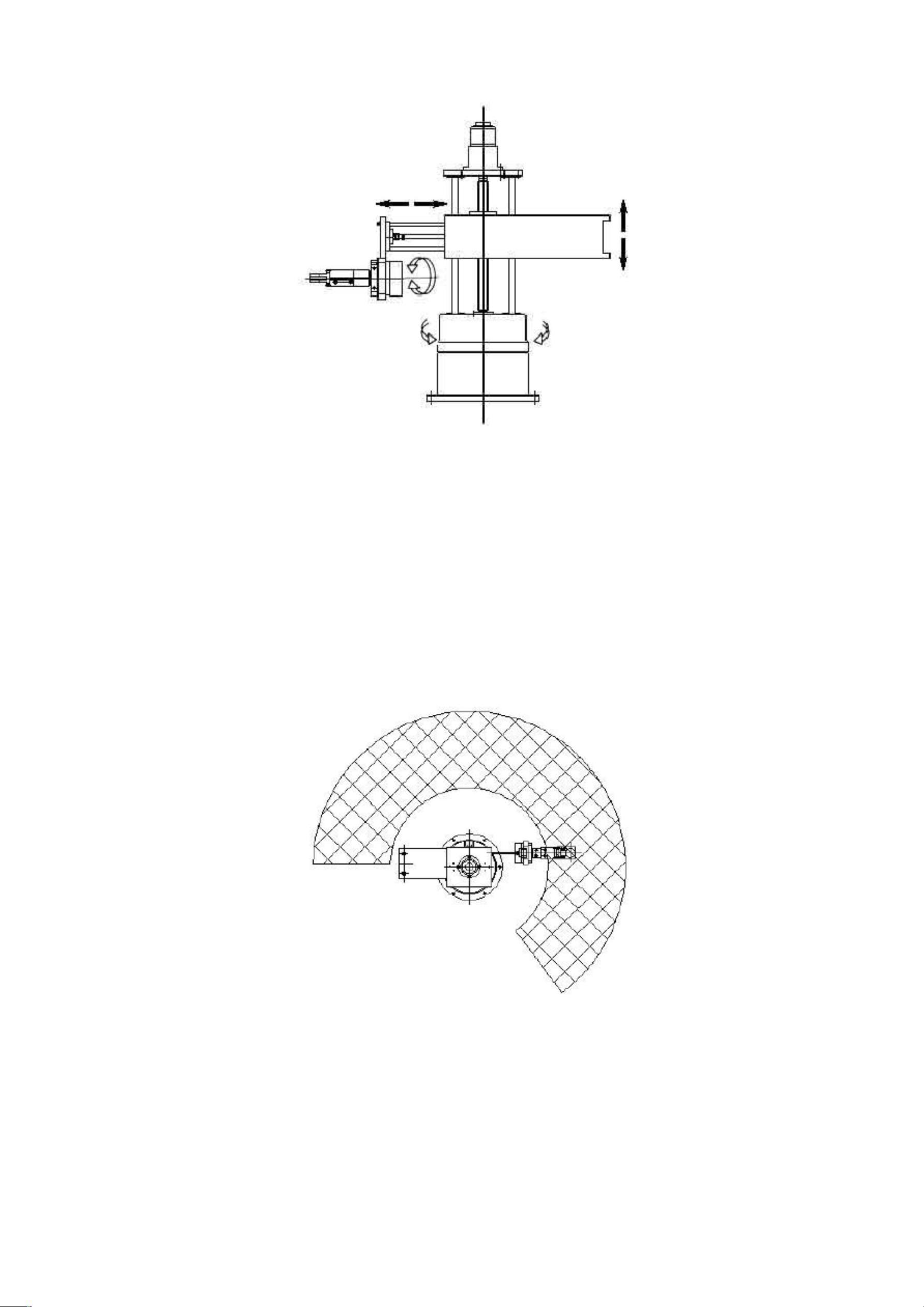
在工业机器人的诸多功能中,抓取和移动是最主要的功能。这两项功能实现的技术基
础是精巧的机械结构设计和良好的伺服控制驱动。本次设计就是在这一思维下展开的。根
据设计内容和需求确定机械手,利用步进电机驱动和谐波齿轮传动来实现机器人的旋转运
动;利用另一台步进电机驱动滚珠丝杠旋转,从而使与滚珠丝杠螺母副固连在一起的手臂
实现上下运动;考虑到本设计中的机械手工作X 围不大,故利用气缸驱动实现手臂的伸缩
运动;末端夹持器则选用气爪来做夹持器,用小型气缸驱动夹紧。气爪的旋转则由与气爪
连接的摆动气缸实现。
其外观与工作移动方位如图 2-2
剩余32页未读,继续阅读
2022-07-12 上传
2022-07-12 上传
2022-07-12 上传
2022-07-12 上传
2021-11-19 上传
2022-07-12 上传
2023-09-16 上传

xxpr_ybgg
- 粉丝: 6796
- 资源: 3万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 將動漫花園資源網的搜尋複製為rss訂閱網址-crx插件
- SpringBoot-REST-API:提供REST API服务的SpringBoot应用程序的演示
- AirHerz:物联网生物识别人力资源管理小部件,以提高生产力,由Airtable模块提供支持
- 测试:测试任务
- IOE4U-crx插件
- mobile-apps-data:我的移动应用程序的数据实用程序
- happy halloween万圣节PPT模板
- 编程课程+GO语言编程+技术开发+系列课程
- 全图格式:标准图全格式代码-matlab开发
- 钢结构施工组织设计-地下变电室工程施工组织设计方案范本
- my-first-webpage
- alx-system_engineering-devops:关于shell
- twig-cache-extension
- anthonytliu.github.io
- 施工组织设计常用流程图集-龙门吊架梁施工工艺流程图
- com.certicamara.singleonsign-crx插件
