无传感器运动感应与自更新指纹技术提升室内围栏定位精度
30 浏览量
更新于2024-07-14
收藏 3.22MB PDF 举报
本文主要探讨了"基于无传感器运动感应和指纹自更新的室内围墙"这一主题,发表在《移动网络与应用》(Mobile Networks and Applications)上,DOI为10.1007/s11036-019-01329-0。作者是Kun Zhao、Wei Xi、Zhiping Jiang等人,该研究发表于2019年,由Springer Science+Business Media, LLC, part of Springer Nature出版。
室内定位是现代技术中的关键特性,尤其是在地理围栏应用中具有巨大的价值。传统的接收信号强度(RSS)指纹识别方法广泛用于判断用户接近特定区域的程度,然而这种方法的动态性和维护成本一直是主要挑战。论文提出了一种结合自更新RSS指纹和信道状态信息(CSI)运动检测的混合电子围栏解决方案。通过多维度匹配和过滤原理,实现RSS指纹的自我更新,从而提高定位精度。
CSI(信道状态信息)被用于速度估计,这有助于减少定位频率和总体开销。作者强调,他们的实验结果显示,提出的室内地理围栏方法在实际环境中表现优异,对于超过3个维度的复杂环境,其性能稳定且有效。这种方法不仅提高了位置确定的准确性,还降低了系统的实时监控需求,对于物联网(IoT)设备的能耗管理和用户体验优化具有重要意义。
此研究对于无线通信、智能家居、智能建筑等领域具有潜在的应用前景,它展示了如何利用先进的信号处理技术和机器学习算法来解决室内定位问题,提高系统效率和用户感知。未来的研究可能进一步探索如何将这种自适应围栏技术与其他传感器融合,或者在更大规模的室内环境中进行优化。这项工作对提升室内定位技术的实用性和可靠性有着积极的推动作用。
Mobile Netw Appl
Table 1 A glance of unpacked frames
Record time(HH:MM:SS) Frequency RSS BSSID Source address Destination address
06:53:31.148619 5500 MHz -−57 dB 30:5a:3a:cb:16:a0 00:16:ea:12:34:56 74:e5:43:5e:fd:a9
06:53:31.153621 5500 MHz −57 dB 30:5a:3a:cb:16:a0 00:16:ea:12:34:56 74:e5:43:5e:fd:a9
06:53:31.158509 5500 MHz −-57 dB 30:5a:3a:cb:16:a0 00:16:ea:12:34:56 74:e5:43:5e:fd:a9
··· ··· ··· ··· ··· ···
06:53:38.141203 5500 MHz −58 dB 30:5a:3a:cb:16:a0 00:16:ea:12:34:56 74:e5:43:5e:fd:a9
··· ··· ··· ··· ··· ···
06:53:45.722784 5500 MHz −57 dB 30:5a:3a:cb:16:a0 00:16:ea:12:34:56 74:e5:43:5e:fd:a9
that have been added to the kernel recently. For instance,
we can use command iw phy phy0 interface add
mon0 type monitor to create a new interface mon0
to set phy0 into monitor mode. In addition, we can use
command iw dev mon0 set freq f
c
to switch the
center frequency of mon0 to f
c
MHz. These operations will
only spend several milliseconds. In motion detection phase
(see Fig. 2), the client keeps normal communication to APs
and obtain CSIs from preambles. When the system detects
object’s abnormal moving (see details in Section 4.2),
the client’s NIC card will change to monitor mode and
record all the packets heard from ambient APs. Table 1
lists the unpacked packets information using single channel
(Channel 100 whose f
c
= 5500 MHz). The table lists
the packets information as follow, time stamp indicated
by the Timing synchronization function,
1
channel center
frequency, RSS value, the identifier of basic service set,
2
transmitter’s MAC (source) address, and receiver’s MAC
(destination) address, respectively.
As shown in Table 1, SDF-based solutions expose two
main drawbacks: 1) In training phase, we have no need to
record such amount of RSS values in a single channel,
whereas we should leverage this opportunity to obtain
more abundant, and meaningful fingerprints; 2) In matching
phase, since users cannot endure long waiting cycles to
obtain a stable RSS numerical characteristics, e.g., mean or
median, calculating the distance between collected samples
average or median and the mean or median in fingerprint
database would result some localization errors. Hence, we,
in this paper, first propose to leverage multiple channel
fingerprint to improve location accuracy (detailed in
Section 4.1) and exploit sample hypothesis testing to verify
1
Timing synchronization function (TSF) is specified in IEEE 802.11
wireless local area network (WLAN) standard which is based on a
1-MHz clock and “tick” in microseconds [49].
2
In IEEE 802.11 wireless local area networking standards, basic
service sets (BSS) are units of devices operating with the same medium
access characteristics.
users’ location. In this way, we can not merely leverage all
the sampled RSS values, but also obtain the confidence of
localization precision (detailed in Section 4.6).
3.2Resolutiondiversity
Wireless devices, e.g., APs, have a discrimination capability
when fingerprinting a specific location. This capability,
however, is subject to inherent constraints of radio signal
propagation.
Discrimination capability is referred to as the ability
that an AP distinguishes a specific location when using
its RSS observations as fingerprints. Ideally, following the
propagation law of wireless signals, the RSS of a certain
wireless signal decays logarithmically with its propaga-
tion distance d. In other words, an identical ΔRSS can
imply a smaller distance change Δd at the location closer
to the antenna of AP, or a larger Δd at the location far
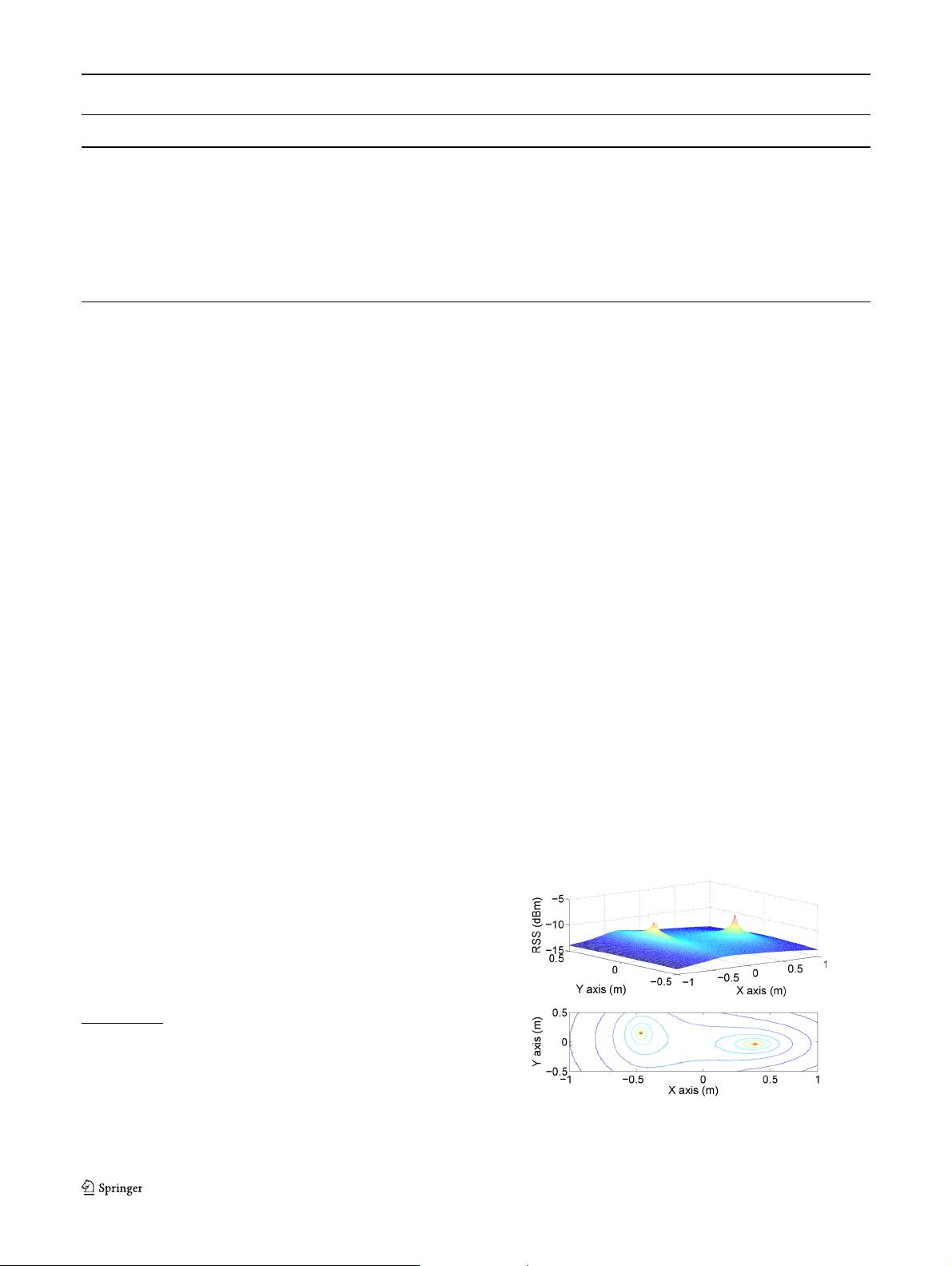
away from the AP’s antenna. As shown in Fig. 1,theRSS
variance shows vast difference in different physical posi-
tions, depending on the specific distance d. Hence, using
the RSS reading from a long-distance AP may cause a large
error in the location estimation, while using those from near
APs can conversely mitigate the error. In fact, such a RSS
variance also indicates a diversity of AP resolution across
different transmitter-receiver distances.
Fig. 1 AP resolution
剩余18页未读,继续阅读
2021-08-14 上传
2024-01-24 上传
2020-07-15 上传
2023-03-13 上传
2023-05-18 上传
2023-05-29 上传
2023-06-05 上传
2023-06-21 上传
2023-06-07 上传

weixin_38741540
- 粉丝: 6
- 资源: 960
 我的内容管理
展开
我的内容管理
展开







最新资源
- 明日知道社区问答系统设计与实现-SSM框架java源码分享
- Unity3D粒子特效包:闪电效果体验报告
- Windows64位Python3.7安装Twisted库指南
- HTMLJS应用程序:多词典阿拉伯语词根检索
- 光纤通信课后习题答案解析及文件资源
- swdogen: 自动扫描源码生成 Swagger 文档的工具
- GD32F10系列芯片Keil IDE下载算法配置指南
- C++实现Emscripten版本的3D俄罗斯方块游戏
- 期末复习必备:全面数据结构课件资料
- WordPress媒体占位符插件:优化开发中的图像占位体验
- 完整扑克牌资源集-55张图片压缩包下载
- 开发轻量级时事通讯活动管理RESTful应用程序
- 长城特固618对讲机写频软件使用指南
- Memry粤语学习工具:开源应用助力记忆提升
- JMC 8.0.0版本发布,支持JDK 1.8及64位系统
- Python看图猜成语游戏源码发布
