使用OpenCV进行视觉测距与坐标变换
需积分: 49 91 浏览量
更新于2024-07-18
6
收藏 3.5MB PDF 举报
"该文档是关于使用OpenCV进行视觉测距的教程,涵盖了图像处理和目标测距的基础知识,特别是涉及到角点检测方法,如Harris角点检测和Shi-Tomasi角点检测,以及SIFT和SURF特征点检测技术。"
在计算机视觉领域,OpenCV是一个强大的开源库,广泛应用于图像处理、目标识别和测距等方面。这篇文档重点讨论了如何利用OpenCV进行视觉测距,这对于机器人导航、无人机飞行、自动驾驶等领域具有重要意义。
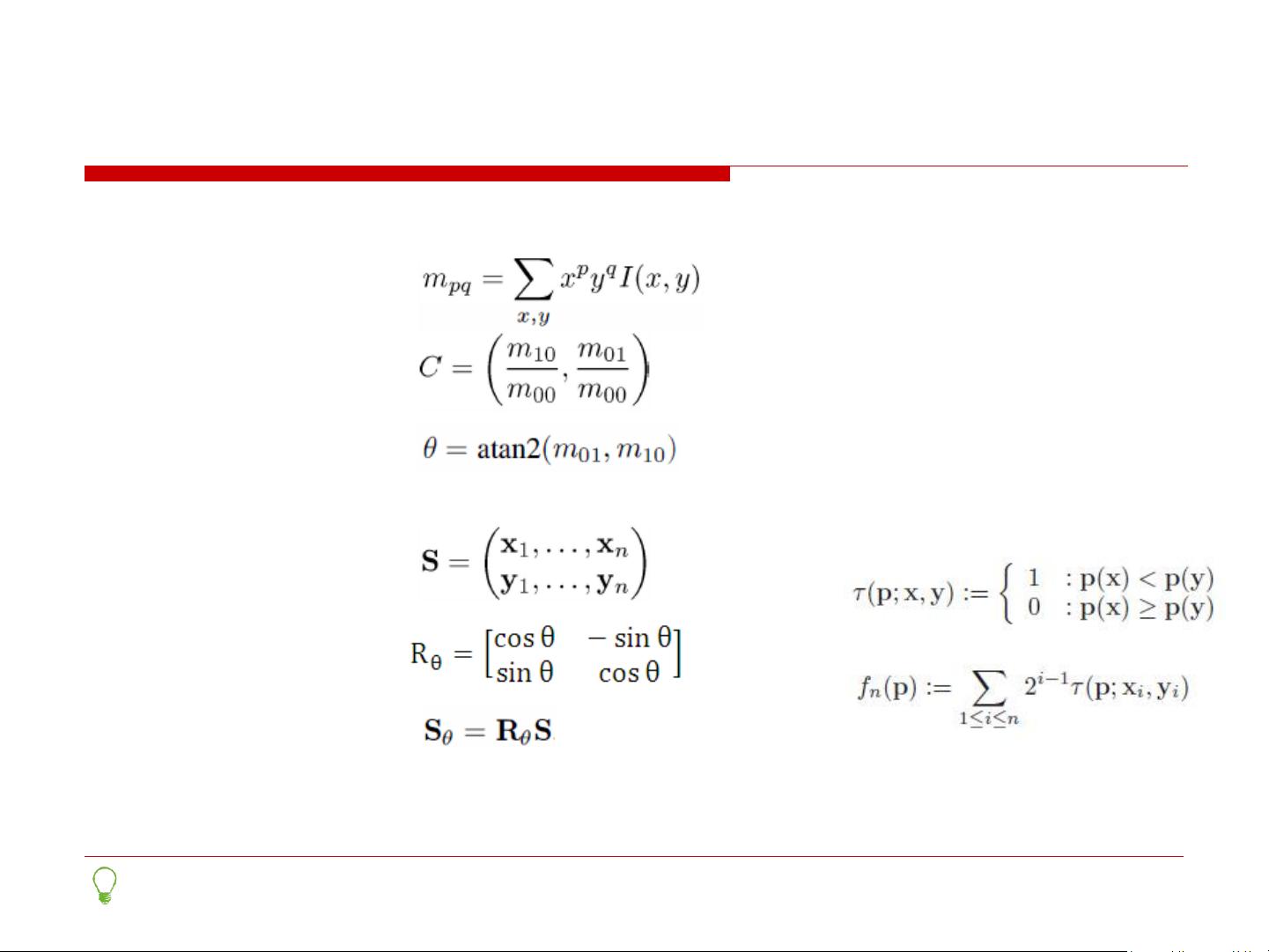
角点检测是图像处理中的关键步骤,用于识别图像中具有显著几何变化的点。文档中提到了两种经典的角点检测算法:Nobel在1988年提出的Harris角点检测和Shi-Tomasi在2000年提出的Good Features to Track算法。Harris角点检测利用矩阵的迹和行列式来确定图像中角点的位置,而Shi-Tomasi算法则基于差分高斯图像的局部最大值来检测角点。
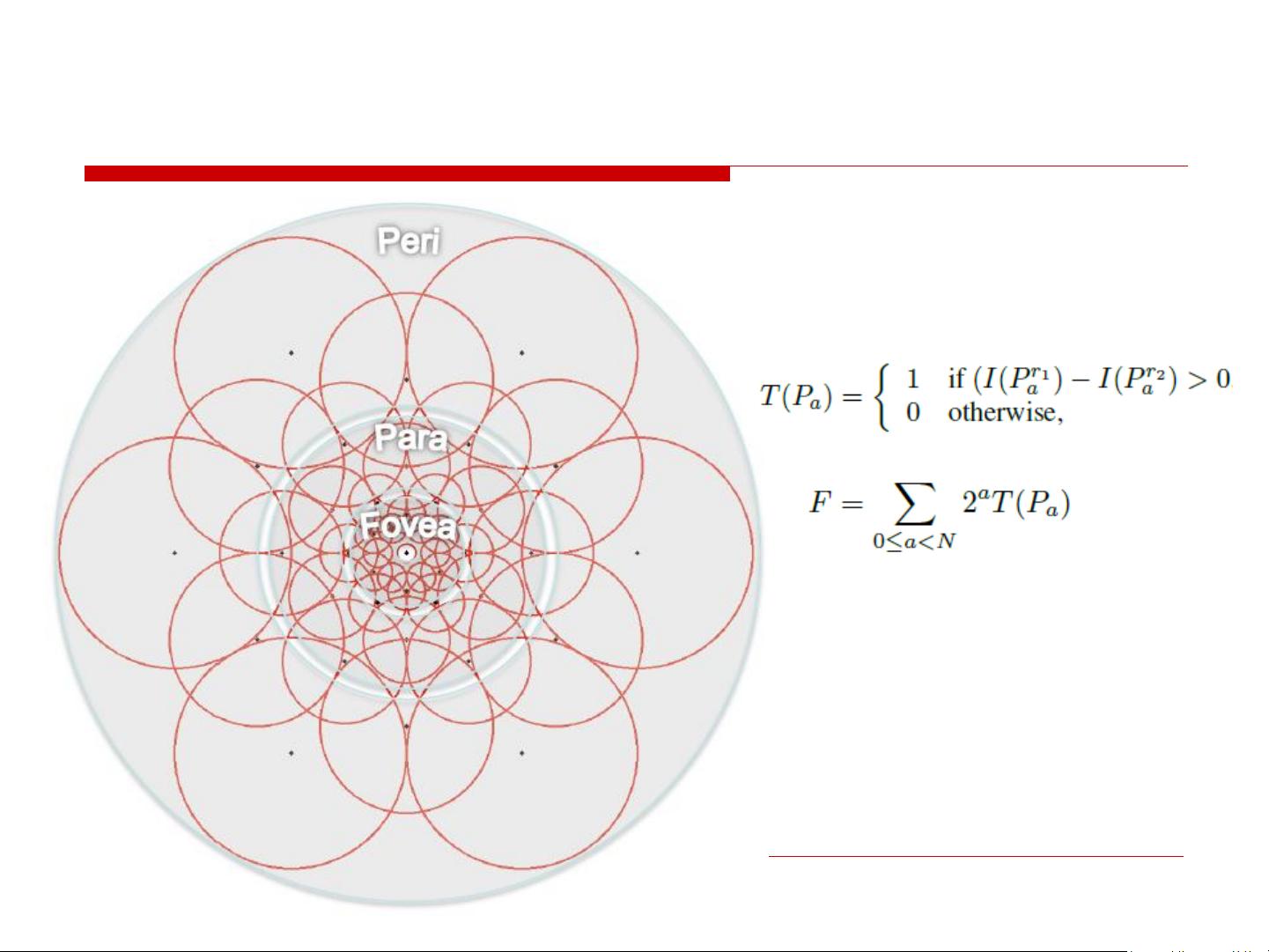
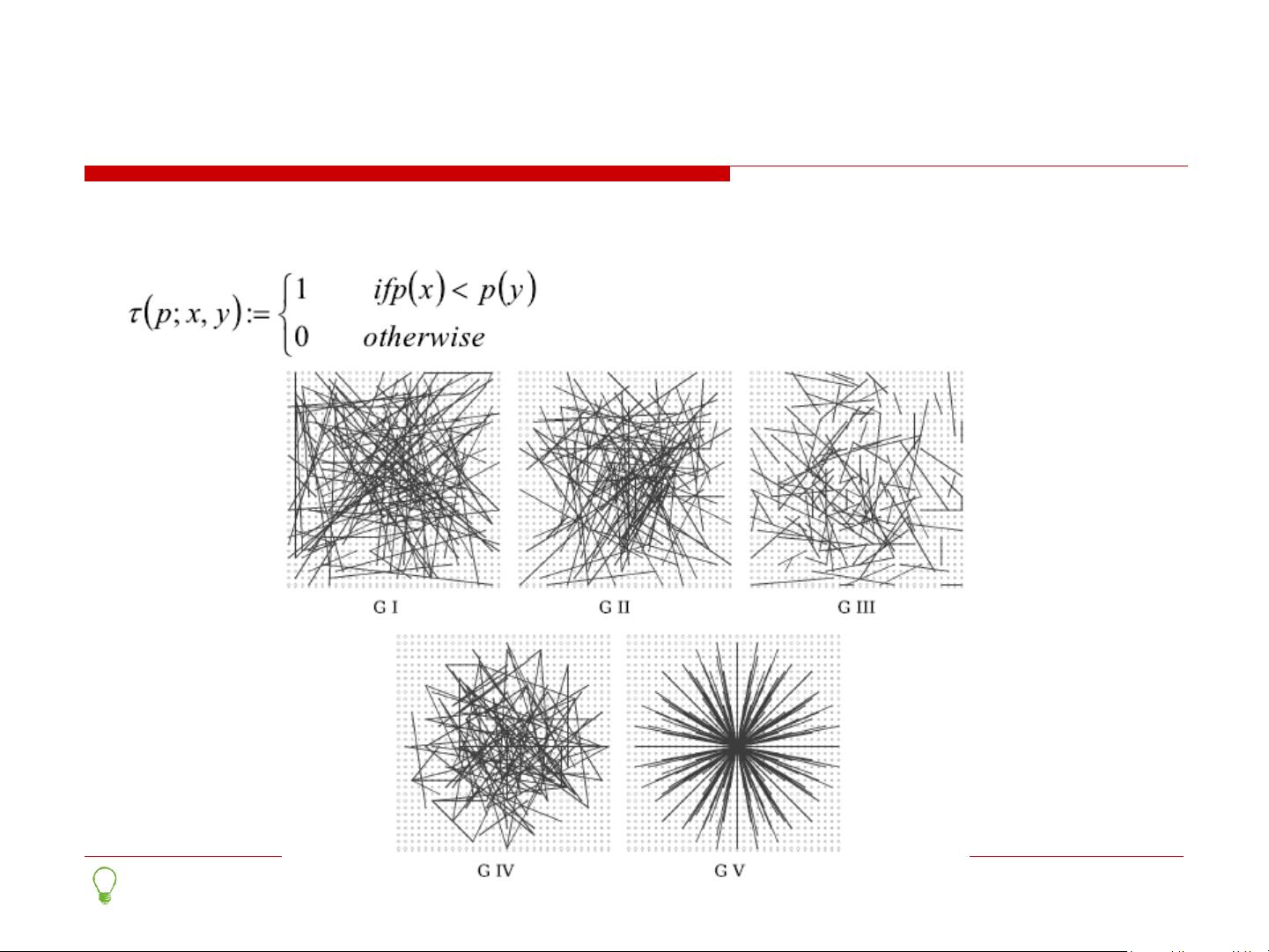
SIFT(Scale-Invariant Feature Transform)特征是另一种重要的图像特征描述符,它对尺度、旋转和光照变化具有不变性。SIFT算法通过在不同尺度和方向上计算图像的梯度直方图来形成128维的特征向量。文档中还提到了SIFT的快速版本——SURF(Speeded Up Robust Features),它通过Box Filter而非高斯滤波器来加速特征检测,并使用Haar小波响应来计算方向和描述符,这使得SURF在计算效率上优于SIFT,但保持了相似的特征点检测性能。
这些技术在OpenCV中都有实现,可以用于图像匹配、物体识别和距离估计。例如,通过检测图像中的特征点,我们可以计算两个不同时刻或不同视角下的同一物体的位移,从而推断出物体或相机的运动。在三维空间中,结合相机的内外参数标定,还可以进一步计算出目标的实际距离。
这篇文档提供了OpenCV视觉测距的基本概念和方法,对于想要学习和应用OpenCV进行图像处理和测量的初学者来说是一份宝贵的资料。通过学习这些内容,读者能够理解并实施基于特征点的图像分析和距离估计算法,从而在实际项目中实现诸如目标跟踪、避障等功能。
点击了解资源详情
2022-05-19 上传
2023-05-13 上传
2023-09-05 上传
2023-07-15 上传
2024-07-22 上传

cookcircle
- 粉丝: 6
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- C语言数组操作:高度检查器编程实践
- 基于Swift开发的嘉定单车LBS iOS应用项目解析
- 钗头凤声乐表演的二度创作分析报告
- 分布式数据库特训营全套教程资料
- JavaScript开发者Robert Bindar的博客平台
- MATLAB投影寻踪代码教程及文件解压缩指南
- HTML5拖放实现的RPSLS游戏教程
- HT://Dig引擎接口,Ampoliros开源模块应用
- 全面探测服务器性能与PHP环境的iprober PHP探针v0.024
- 新版提醒应用v2:基于MongoDB的数据存储
- 《我的世界》东方大陆1.12.2材质包深度体验
- Hypercore Promisifier: JavaScript中的回调转换为Promise包装器
- 探索开源项目Artifice:Slyme脚本与技巧游戏
- Matlab机器人学习代码解析与笔记分享
- 查尔默斯大学计算物理作业HP2解析
- GitHub问题管理新工具:GIRA-crx插件介绍
