自平衡人形机器人动作控制器设计与实现:基于反馈控制的多级智能架构
54 浏览量
更新于2024-08-30
收藏 271KB PDF 举报
本文主要探讨的是模拟技术在自平衡人形机器人动作控制器设计与实现中的应用。随着移动机器人技术的发展,轮式移动机器人,特别是自平衡机器人,因其结构简单、控制性强和成本效益高,已经成为研究的热点。自平衡机器人依赖于水平双轮布局,其静态稳定性较差,需要动态控制来维持平衡。通过姿态传感器监控机器人倾斜角度和角速度,伺服电机根据这些信息调整驱动电压的转向和转速,从而实现动态平衡。
设计的关键在于动作控制器,它是连接主处理器和执行元件(如舵机)的重要组件。本文提出了一种新颖的控制策略,采用三个16位低功耗单片机(MSP430F149)作为核心,实现了多层次的控制管理。这种设计确保了动作控制器能够处理复杂的数据处理和实时决策,以满足多关节、多自由度的自平衡人形机器人对精确控制的需求。
动作控制器的体系结构主要包括反馈控制环节,它通过收集环境和自身姿态信息,运用算法进行实时分析和调整,确保机器人在不断变化的环境中保持稳定。从主控制器到执行器,动作控制器起到了关键的信号处理和转换作用,提高了系统的响应速度和控制精度。
值得注意的是,虽然这种设计在控制性能上表现出色,但由于成本较高,目前可能并不适合大规模商业化应用。然而,对于科研和实验领域,这种先进的自平衡人形机器人动作控制器无疑提供了高效且灵活的解决方案,推动了模拟技术和机器人技术的前沿发展。未来的研究可能进一步优化控制器的成本结构,使之能够在更多实际场景中得到广泛应用。
模拟技术中的一种自平衡人形机器人动作控制器的设计和实现模拟技术中的一种自平衡人形机器人动作控制器的设计和实现
移动式机器人在各行各业具有广泛的应用,而轮式移动机器人由于具有结构简单、可控性强、成本低等优点,
成为移动式机器人研究的一个主要方向。自平衡机器人采用水平布置的两轮结构,本身是一个不稳定体。也就
是说,自平衡机器人在静止状态下,不能保持平衡,车体总是要向前或向后倾倒;而在运动状态下,可以通过
一定的控制策略使它达到动态平衡。 由于自平衡机器人具有内在不稳定性和结构灵活性,国内外机器人爱
好者设计了多种结构、外观各异的自平衡机器人,尝试采用各种控制策略使其达到自平衡控制。通常这类机器
人采用姿态传感器检测机器人车体的倾倒角度和倾倒角速度,根据当前机器人姿态控制伺服电机驱动电压的转
向和转速,从而使机器人
移动式机器人在各行各业具有广泛的应用,而轮式移动机器人由于具有结构简单、可控性强、成本低等优点,成为移动式
机器人研究的一个主要方向。自平衡机器人采用水平布置的两轮结构,本身是一个不稳定体。也就是说,自平衡机器人在静止
状态下,不能保持平衡,车体总是要向前或向后倾倒;而在运动状态下,可以通过一定的控制策略使它达到动态平衡。
由于自平衡机器人具有内在不稳定性和结构灵活性,国内外机器人爱好者设计了多种结构、外观各异的自平衡机器人,尝
试采用各种控制策略使其达到自平衡控制。通常这类机器人采用姿态传感器检测机器人车体的倾倒角度和倾倒角速度,根据当
前机器人姿态控制伺服电机驱动电压的转向和转速,从而使机器人保持平衡。该方式制作的自平衡机器人虽然控制性能良好,
但成本高,不适合广泛推广。为解决机器人动作控制而设计的,它将主处理器发出任务处理命令分配到3个16位超低功耗单片
机(MSP430F149)上去执行,实现多层次的控制管理。该人形机器人具有多关节,多自由度,自平衡的控制需求,需要动
作控制器在机器人系统控制中起到关键性的作用。
1 动作控制器的设计动作控制器的设计
1.1 体系结构体系结构
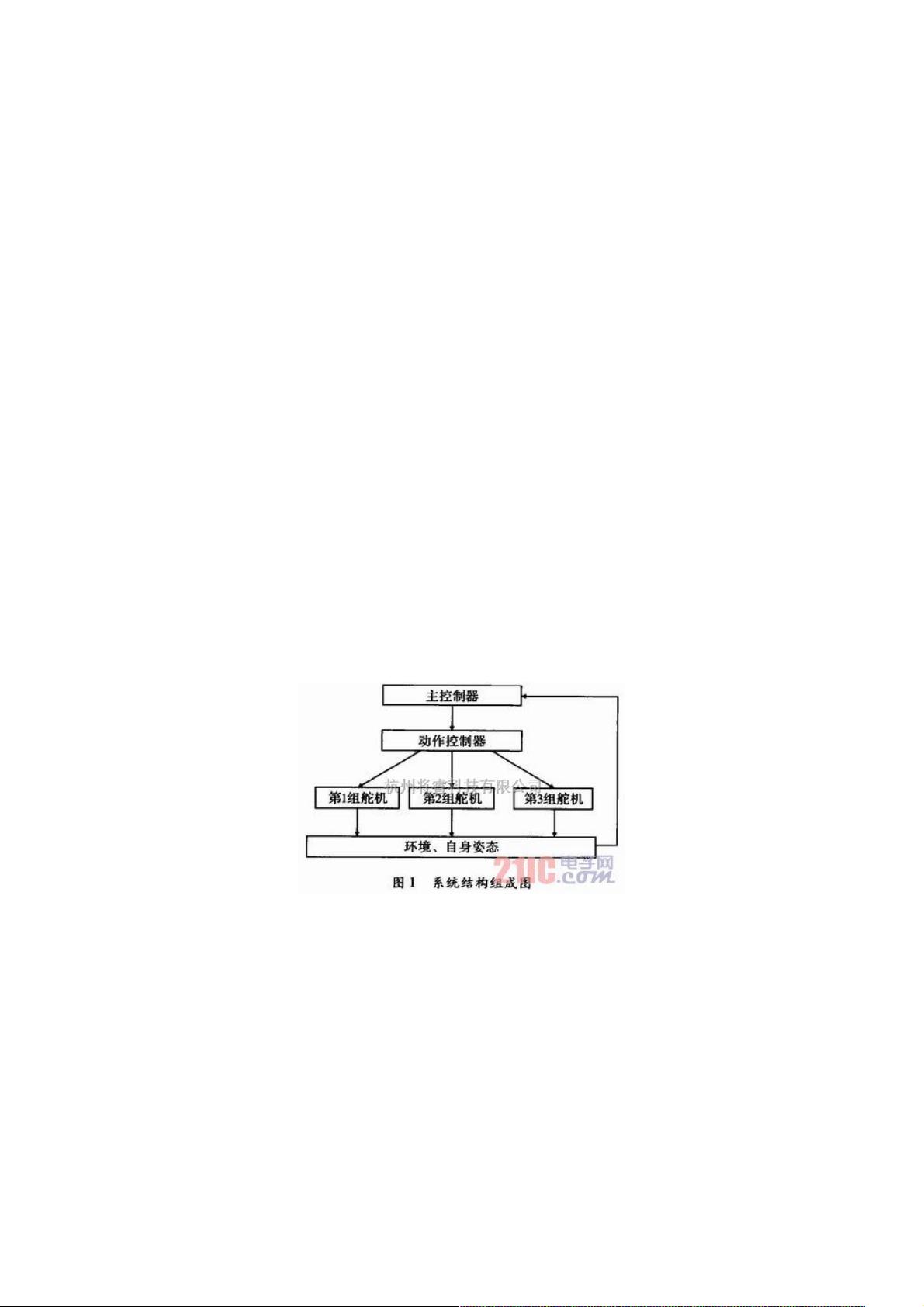
自平衡人形机器人需要获取不可预知的环境信息以及自身姿态信息进行综合运算并及时进行自身姿态的调整。机器人的这
种行为特点决定了机器人的整体控制结构要采用反馈控制。如图1所示,描述了这种反馈控制结构的硬件实现。
同时,在图1中可见从机器人主控制器到执行元件(舵机)之间,有一层动作控制器的结构。这一层结构的任务是实现控
制命令到舵机控制信号之间的功能转换,这种体系结构的设计,就是借鉴计算机系统结构中的分层结构体系思想。采用这种分
层的结构,实现了软件和硬件、命令和动作的相对隔离。其突出的优点体现在能够使主控制器专注于数据的处理,而对下行设
备只负责发送指令,对于硬件的复杂的操作时序,由动作控制器负责产生。
1.2 实现过程实现过程
1.2.1 硬件实现硬件实现
为满足机器人整体控制体系结构中指令到执行的层次性要求,动作控制器需要完成命令解析,信号驱动等任务。如图2描
述了动作控制器内部的结构,其主要由串行总线、3个可并行工作的16位单片机、信号驱动部分构成。这种结构能够从总线接
收命令,单片机进行指令解析并输出控制电信号,外部电路对控制信号驱动放大,从而分别实现对执行舵机的控制。图3为动
作控制器中一个单片机工作模块的硬件原理图。
下载后可阅读完整内容,剩余3页未读,立即下载
321 浏览量
607 浏览量
235 浏览量
402 浏览量
767 浏览量
113 浏览量
2022-11-25 上传
149 浏览量
2024-04-14 上传

weixin_38558054
- 粉丝: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- 初学者入门必备!Visual C++开发的连连看小程序
- C#实现SqlServer分页存储过程示例分析
- 西门子工业网络通信例程解读与实践
- JavaScript实现表格变色与选中效果指南
- MVP与Retrofit2.0相结合的登录示例教程
- MFC实现透明泡泡效果与文件操作教程
- 探索Delphi ERP框架的核心功能与应用案例
- 爱尔兰COVID-19案例数据分析与可视化
- 提升效率的三维石头制作插件
- 人脸C++识别系统实现:源码与测试包
- MishMash Hackathon:Python编程马拉松盛事
- JavaScript Switch语句练习指南:简洁注释详解
- C语言实现的通讯录管理系统设计教程
- ASP.net实现用户登录注册功能模块详解
- 吉时利2000数据读取与分析教程
- 钻石画软件:从设计到生产的高效解决方案
