Kuhn-Tucker定理在多机器人系统内力优化中的应用
需积分: 5 148 浏览量
更新于2024-08-11
收藏 309KB PDF 举报
"本文主要探讨了如何利用Kuhn-Tucker定理解决多机器人协作操作下物体内力最小化的问题,作者黄琦、郑戈邦和李志弘分别来自浙江大学和韩国忠南大学。他们提出的方法能够有效处理复杂约束条件下的极值问题,尤其在处理多个机器人同时作用于物体时的内力优化。通过分析二维物体的例子,证明了这种方法的正确性和通用性。"
在多机器人系统中,协同操作物体时,如何有效地分配各个机器人的力量以使物体内力达到最小是关键的技术挑战。Kuhn-Tucker定理,源于数学优化理论,为解决这类问题提供了有力的工具。这个定理主要应用于有约束条件的优化问题,能够在满足约束条件下找到局部或全局极小值。
Kuhn-Tucker定理的核心思想是,当一个优化问题存在线性或非线性的约束时,如果一个解点满足特定的Kuhn-Tucker条件(包括互补松弛条件和梯度的正交性),那么这个解点就是一个局部最优解。在多机器人系统中,这些约束可能包括机器人能力限制、物体稳定性条件、以及相互之间的协调等。
针对两个机器人作用下的情况,研究者选取了两种不同类型的二维物体进行实验,可能是刚体和弹性体,以验证Kuhn-Tucker定理在实际问题中的应用。通过计算和比较,他们证明了所提出的方法能够准确地找出内力最小化的解,并且这种解法不仅适用于这两个简单的例子,还具有广泛的应用前景,可以推广到更复杂的多机器人系统和更高维度的物体。
此外,论文还涉及到内部力的局部极小值和全局极小值的概念。局部极小值是指在某一局部区域内,找不到更低的解,而全局极小值是在整个可行域内找不到更低的解。寻找全局极小值通常比寻找局部极小值更为困难,但更符合实际问题的需求。为了确保找到的是全局最优解,可能需要结合其他优化算法和策略,如全局优化方法或者多起点搜索。
总结来说,这篇论文展示了Kuhn-Tucker定理在多机器人系统内力优化问题上的潜力,为机器人协同操作提供了理论支持,有助于提高操作效率和安全性,同时也为未来解决更复杂环境下的机器人协作问题提供了新的研究方向。
利用
Kuhn-Tucker
定理求解多机器人作用下物体内力极小值一一黄
琦
郑戈邦李志弘
利用
Kuhn
Tucker
定理求解多机器人作用下
物体内力极小值
黄琦
1
1.浙江大学,杭州,
310027
郑气邦
2
李志弘
2
2.
韩国忠南大学,大田市,
305
一
704
摘要
z
利用
Kuhn
一
Tucker
定理可转化极值问题复杂约束条件的特性,提出了一种求解多机器人作
用下物体内力极小值的方法。考虑两个机器人作用下的情况,以两种不同类型的二维物体为例,验证了
该方法的正确性。对于其他复杂情况,该方法亦适用。
关键词
:Kuhn-Tucker
定理;内力;局部极小值;全局极小值;正定矩阵
中图分类号:
TP249
文章编号
:1004--132X(2007)11--1289
一
05
Calculation
of
the
Minimizing
Internal
Forces
in
Multiple
Robot
Manipulating
Systems Based on
Kuhn-Tucker
Theorem
Huang
Qi
l
Zheng
Yibang
2
Lee
Jihong
2
1.
Zhejiang
University
,
Hangzhou
, 310027
2.
Chungnam
National
University
,
Taejon
,
Korean
Abstract:
On
巳
computing
method
of
the
minimizing
internal
forces in
multiple
robot
manipulating
systems
based
on
the
Kuhn-Tucker
theorem
was
proposed
because
the
Kuhn
一
Tucker
theorem
can
transform
the
complex
restricted
conditions
of
the
minimizing
extremism
problem.
Taking
two
differ-
ent
kind
of
objects
and
two
robots
as
example
,
the
effectiveness of
this
method
is verified.
Further-
more
,
this
method
can
be applied
to
other
complicated
conditions.
Key words:
Kuhn
-
Tucker
theorem;
internal
force;
local minimizing
force;
global minimizing
force;
positive definite
matrix
O
引言
在机器人力学中,如何确定机器人用机械臂
抓物体时的摩擦力是一个热点问题,国内外已有
不少学者在这方面进行了积极的研究,提出了不
少有益的方法和见解。不过以往的研究大多针对
非对称的单个机器人,对所抓物体的分析大多是
静态的,且讨论的主要是接触稳定性和最大抓力
之间的关系,其动态模型尚未有清晰的数学表达
方法。
本文主要讨论多机器人作用下物体的接触稳
定性问题,其中,求解在静摩擦约束条件下的内力
极小值是机器人应用中亟待解决的基础问题,其
求解成功的话,可在机器人装置投入使用前起到
模拟的作用,以便能及时发现和改正所存在的缺
陷,提高生产效率。上述问题描述复杂、约束条
件难以化解,多年来一直是一个难以解决的棘手
问题。由于
Kuhn-Tucker
定理
[IJ
可转化极值问
题复杂的约束条件,因此,本文研究利用该定理求
解多机器人作用下物体内力的极小值问题。
收稿日期
:2005-09-23
基金项目
g
浙江省自然科学基金资助项目
(Y106397)
;中国博士
后科学基金资助项目
(20060391053);
韩国科学财团地方大学优
秀科学工作者资助项目
(R05-
2003-000-10215-0)
1
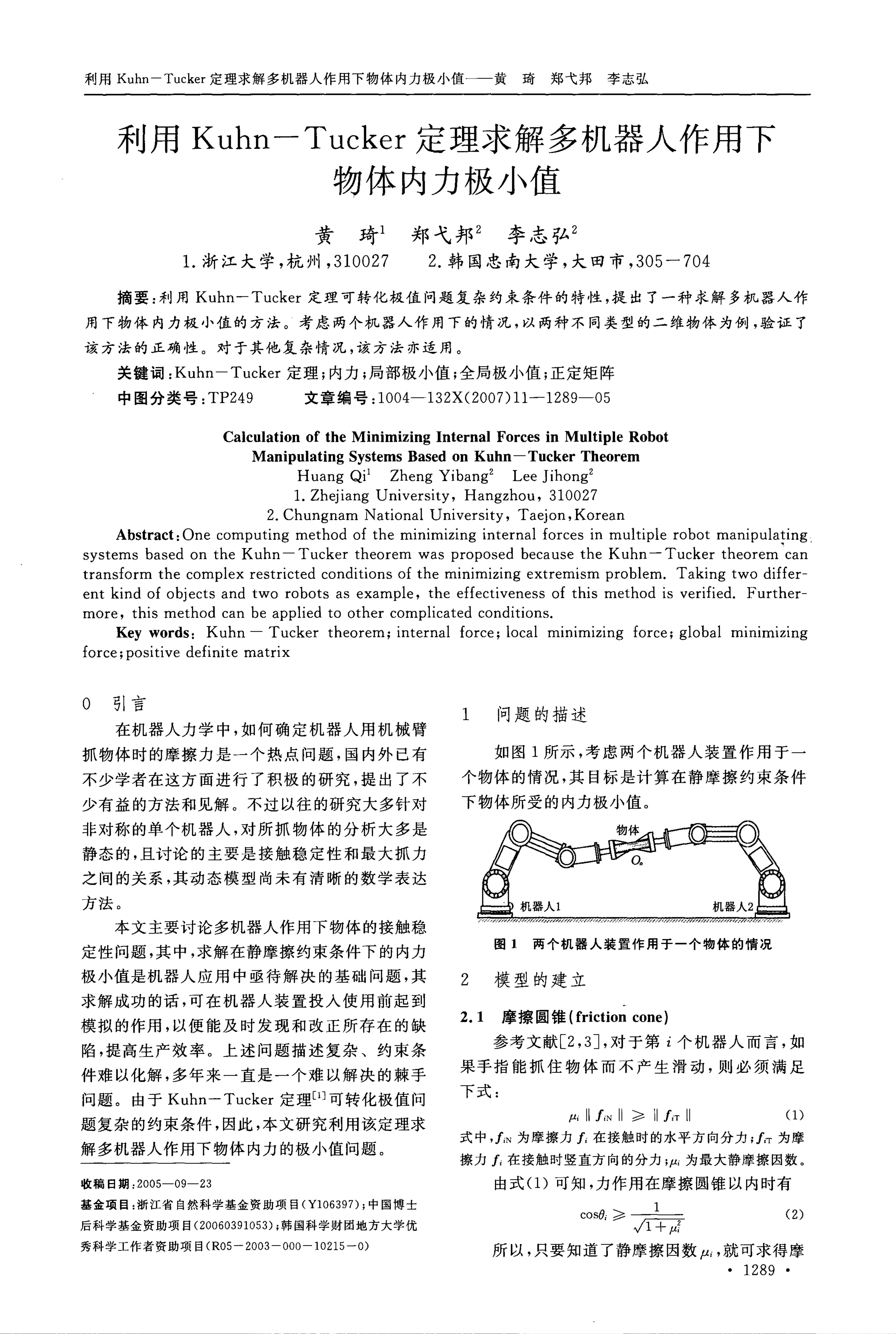
问题的描述
如图
1
所示,考虑两个机器人装置作用于一
个物体的情况,其目标是计算在静摩擦约束条件
下物体所受的内力极小值。
机器人
l
机器人
2
;-;~e:_"'
..
'/,,;厅,叫斟
图
1
两个机器人装置作用于一个物体的情况
2
模型的建立
2.1
摩擦圆锥
(friction
cone)
参考文献
[2
,
3J
,对于第
t
个机器人而言,如
果手指能抓住物体而不产生滑动,则必须满足
下式:
μ11
JiN
11
;?
11
JiT
11
(1)
式中
,
JiN
为摩擦力
Ji
在接触时的水平方向分力
;J.T
为摩
擦力
Ji
在接触时竖直方向的分力
;μa
为最大静摩擦因数。
由式(1)可知,力作用在摩擦圆锥以内时有
∞略》
土一寸
、
11+μi
(2)
所以,只要知道了静摩擦因数户,就可求得摩
1289 •
下载后可阅读完整内容,剩余4页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
156 浏览量
2021-06-01 上传
2023-05-10 上传
2021-05-20 上传
2021-05-15 上传
2021-05-19 上传

weixin_38674992
- 粉丝: 7
- 资源: 963
 我的内容管理
展开
我的内容管理
展开







最新资源
- TypeScript组件化应用实践挑战解析
- 微信小程序药店管理系统的设计与实现
- OB2PluginSample 插件开发:依赖项管理技巧
- 图像处理技术详解与实践应用
- IML++ v.1.2a:C++现代迭代方法库更新
- 开源软件实现手机GPRS连接Linux网络
- 雷达数据解析:CSV操作提取408 ARS目标物理信息
- myStudies:探索后端开发与TypeScript实践
- Matlab源代码实现DFT的cefine程序指南
- 基于用户协作过滤的推荐系统实践入门
- 童心党史系统微信小程序设计与开发
- Salesforce Markdown工作簿:掌握技术细节指南
- 高效库存管理系统的开发与应用
- Kafka与Zeebe集成新工具:Kafka-Connect-Zeebe介绍与实践
- LiteLoaderBDS:轻量级Bedrock服务器插件加载器
- Linux环境下aarch64架构ACPI表格处理工具
