AGCF-PLL:一种自适应环增益控制的GNSS载波跟踪策略
91 浏览量
更新于2024-08-27
收藏 768KB PDF 举报
"这篇研究论文探讨了一种针对全球导航卫星系统(GNSS)载波跟踪的自适应环路增益控制策略,旨在提升在高动态应用中的相位锁定环(PLL)跟踪能力。"
在全球导航卫星系统(GNSS)接收机中,载波跟踪是至关重要的一个环节,它确保了信号的精确捕获和解码。相位锁定环(PLL)是一种广泛使用的跟踪技术,其通过调整本地振荡器的频率来使接收信号与输入的卫星载波同步。然而,传统PLL由于其固定系数,在高动态环境或信号质量变化的条件下可能会导致跟踪性能下降。
论文提出了一种新颖的自适应环路增益控制滤波器(AGCF-PLL)设计,旨在克服这一问题。作者首先建立了基于二阶和三阶PLL的数学模型,用于预测系统的性能。通过这个模型,他们能够分析新的PLL结构在不同信号条件下的误差特性。
对AGCF-PLL的误差特性进行分析后,研究人员制定了一个最优的环路增益控制策略。这个策略基于误差特性曲线,目的是最小化跟踪误差,从而提高 PLL 在各种复杂环境下的性能。完全自适应的环路增益控制能够动态调整,以适应不断变化的信号条件,如信号强度的变化、多径效应或接收机运动带来的影响。
论文的贡献在于提供了一种新的 PLL 设计方法,该方法通过自适应增益控制增强了跟踪精度和鲁棒性,尤其适用于高动态环境中的GNSS接收机。这一策略有望改善现有GPS、GLONASS、Galileo、BeiDou等全球导航系统的接收性能,为未来的导航和定位服务提供更稳定、更准确的信号处理方案。
这篇论文深入研究了GNSS载波跟踪中的关键问题,并提出了一种创新的解决方法,对提高 GNSS 接收机在复杂环境下的性能具有重要的理论和实际意义。
Where
is damping factor of second order loop, a and b
are coefficients of third order loop,
1
n
,
2
n
is
characteristic frequency of second and third order PLL,
respectively.
Substituting equation (4) and (5) into equation (1) and (3),
respectively, the PLL system transfer function and error
transfer function could be written as:
2
1 1
1
2 2
1 1
2
( )
2
n n
n n
s
H s
s s
(6)
2
1
2 2
1 1
( )
2
e
n n
s
H s
s s
(7)
2 2 3
2 2 2
2
3 2 2 3
2 2 2
( )
n n n
n n n
b s a s
H s
s b s a s
(8)
3
2
3 2 2 3
2 2 2
( )
e
n n n
s
H s
s b s a s
(9)
where, for second and third order PLL, respectively ,
1
( )
H s
and
2
( )
H s
are transfer functions and
1
( )
e
H s
and
2
( )
e
H s
are error transfer functions.
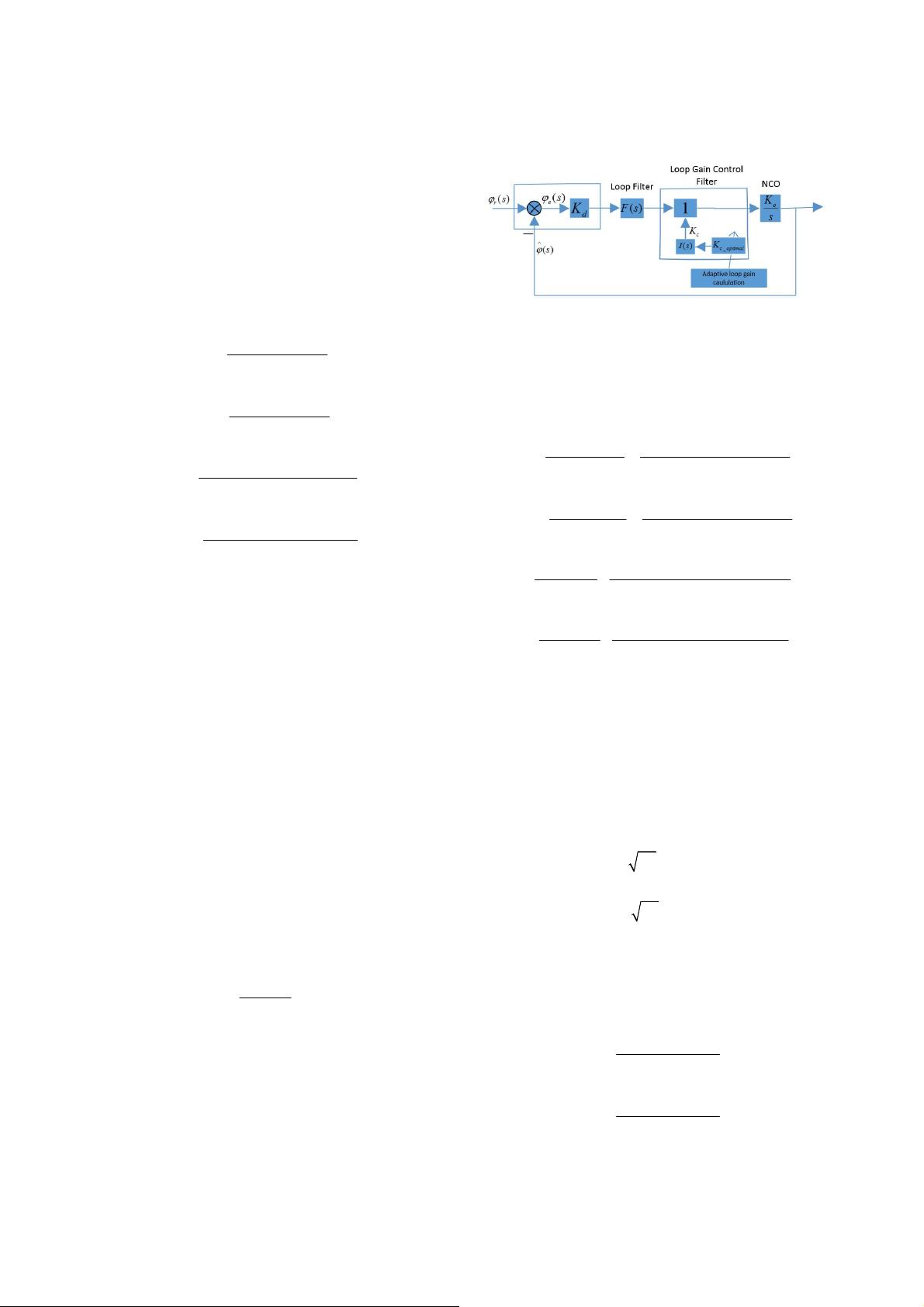
The model of AGCF-PLL
In order to control the loop gain conveniently and smoothly
according to different relative dynamic and signal strength,
loop gain control filter was inserted into the traditional PLL
structure, including a gain control factor(
c
K
) and inertial
element(
( )
I s
) as shown in figure 2. Consequently, actual
loop gain could be expressed as:
'
c o d
K K K K
Obviously, loop gain could be adjusted using
c
K
.
Generally,
o
K
and
d
K
are set to 1 when arc tangent
function is employed as phase discriminator in GNSS
receivers. Thus,
c
K
is actual loop gain in this situation.
The transfer function of loop gain control filter is:
_
( )
1
c optimal
c
K
K s
Ts
(11)
Where
T
is the time constant of inertial element, and
_
c optimal
K
is optimal loop gain based on estimated relative
dynamic and SNR. The inertial element can delay the
change rate of loop gain.
Fig. 2 PLL model with loop gain control filter
Taking figure.2 into account, the PLL transfer function
and error transfer function of second order and third order
AGCF-PLL can be derived to be their general forms as
follows:
2
1 1 1
3
2 2
1 1 1
( ) 2
( )
( ) 2
c n c n c
c n c n c
K KF s K s K
H s
s K KF s s K s K
(12)
2
3
2 2
1 1
( )
( ) 2
e
c n c n c
s s
H s
s K KF s s K s K
(13)
2 2 3
2 2 2 2
4
3 2 2 3
2 2 2 2
( )
( )
( )
c c n c n c n
c c n c n c n
K KF s K b s K a s K
H s
s K KF s s K b s K a s K
(14)
3
4
3 2 2 3
2 2 2 2
( )
( )
e
c c n c n c n
s s
H s
s K KF s s K b s K a s K
(15)
The initial element is not included because of its delay
function. When loop gain reach its steady value, initial
element can be ignored.
To normalize the new models for the sake of simplifying the
analysis, two sets of new loop filter coefficients are
introduced. The first set of new coefficients of loop filter is
used to normalize the second order AGCF-PLL and defined
as follows:
'
c
K
(16)
'
1 1
n c n
K
(17)
Substituting those two equations into equation (6) and
equation (7), the second order AGCF-PLL transfer function
and error transfer function can be rewritten to be their
normalized form as:
' ' ' 2
1 1
3
2 ' ' ' 2
1 1
2
( )
2
n n
n n
s
H s
s
(18)
2
3
2 ' ' ' 2
1 1
( )
2
n n
s
H s
s
(19)
剩余11页未读,继续阅读
2015-04-14 上传
2015-08-01 上传
2021-02-07 上传
2021-02-09 上传
2021-02-10 上传
2021-02-10 上传
2021-02-22 上传
2021-02-11 上传
2021-02-08 上传

weixin_38659812
- 粉丝: 3
- 资源: 882
 我的内容管理
展开
我的内容管理
展开







最新资源
- NIST REFPROP问题反馈与解决方案存储库
- 掌握LeetCode习题的系统开源答案
- ctop:实现汉字按首字母拼音分类排序的PHP工具
- 微信小程序课程学习——投资融资类产品说明
- Matlab犯罪模拟器开发:探索《当蛮力失败》犯罪惩罚模型
- Java网上招聘系统实战项目源码及部署教程
- OneSky APIPHP5库:PHP5.1及以上版本的API集成
- 实时监控MySQL导入进度的bash脚本技巧
- 使用MATLAB开发交流电压脉冲生成控制系统
- ESP32安全OTA更新:原生API与WebSocket加密传输
- Sonic-Sharp: 基于《刺猬索尼克》的开源C#游戏引擎
- Java文章发布系统源码及部署教程
- CQUPT Python课程代码资源完整分享
- 易语言实现获取目录尺寸的Scripting.FileSystemObject对象方法
- Excel宾果卡生成器:自定义和打印多张卡片
- 使用HALCON实现图像二维码自动读取与解码
