V-M双闭环直流可逆调速系统建模与仿真分析
需积分: 11 154 浏览量
更新于2024-07-31
3
收藏 957KB DOC 举报
"V-M双闭环直流可逆调速系统建模与仿真实现电力拖动课程设计,基于MATLAB平台进行。"
V-M系统,即电压-电机控制系统,是一种广泛应用的直流调速系统,通常由晶闸管整流器和直流电动机组成。这种系统在调速性能和稳定性上表现出色,是电力传动控制系统中的基础。直流电动机因其优良的起动和制动特性,以及能在宽范围内平滑调速,被广泛采纳。调速系统对于许多电力拖动系统至关重要,因为它可以通过控制转速来调整系统的运行状态。
V-M系统的运作原理如图1-1所示,其中控制电压[pic]能够影响触发装置GT输出脉冲的相位,进而控制晶闸管整流器VT的瞬时电压[pic],最终调整平均整流电压[pic]。理想状态下,整流电压和控制电压之间的关系为线性,具体由公式(1-1)表达。通过调节[pic],可以改变电动机的反电动势[pic]、整流电流瞬时值[pic]和主电路参数,如总电感[pic]和总电阻[pic],这反映在瞬时电压平衡方程式(1-2)中。
为了简化分析,可以将整流装置内阻[pic]视为负载的一部分,构建等效电路图1-2。利用触发脉冲延迟角[pic]可以控制整流电压平均值[pic],这是晶闸管整流器的主要特征。公式(1-3)给出了全控整流电路中,电流连续时,控制角[pic]对整流电压的影响。
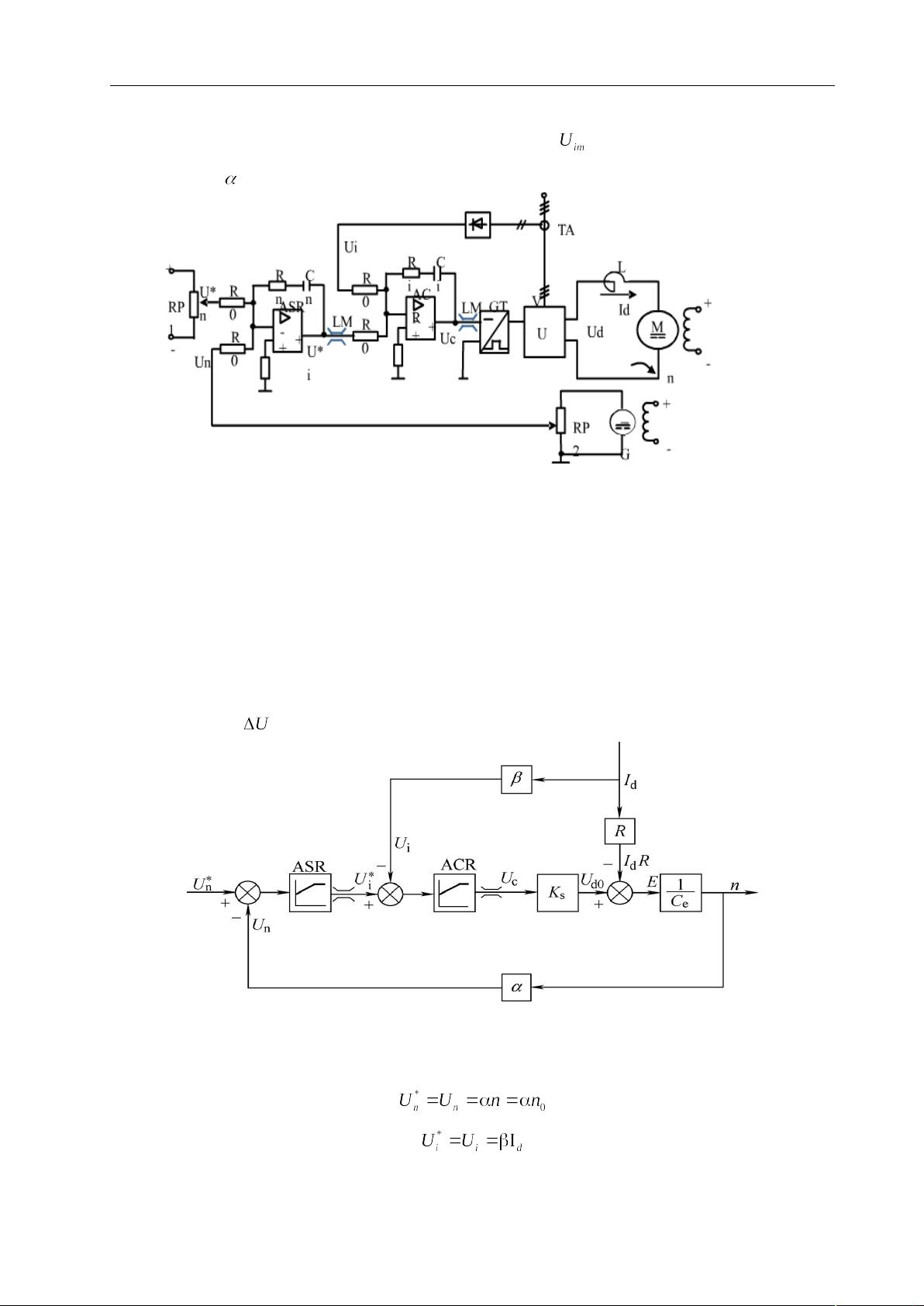
进入V-M双闭环可逆直流调速设计部分,系统采用转速和电流两个闭环,电流环(ACR)作为内环,转速环(ASR)作为外环。电流环用于快速响应和稳定电流,转速环则确保电机的精确速度控制。两环串联,电流调节器的输出作为转速调节器的输入,最后通过转速调节器的输出调控电力电子变换器UPE,改变电机转速。电流和转速反馈电路的加入保证了电动机在运行过程中无静差。
如图2-1所示,系统电气原理图清晰地展示了这种双闭环结构。控制环节的设计旨在优化系统的动态和静态性能,确保电机能够按照设定指令准确、快速地运行。通过这样的设计,V-M双闭环直流可逆调速系统能够在MATLAB环境下进行详细的建模仿真,为电力拖动课程设计提供了实践平台。
武汉理工大学《电力拖动自动控制系统》课程设计说明书
对应电机的最大电流;电流调节器 ACR 输出限幅电压 限制了整流输出最大电压值,
限最小触发角 。
图 2-4 电气原理简图
2.3 双闭环稳态结构及参数设置
双闭环直流调速系统的稳态结构如图 2-5 所示,两个调节器均采用限幅作用的 PI 调节
器。当调节器饱和是,输出达到限幅值,输入量的变化不再影响输出,除非有反向的输
入信号时调节器屯出饱和。当调节器不饱和是,调节器工作在线性调节状态,其作用是
使输出偏差电压 在稳态是为零。
图 2-5 稳态结构图
当转速调节器不饱和时,有
4
剩余18页未读,继续阅读
2010-12-29 上传
2022-02-17 上传
2024-11-01 上传
2024-11-01 上传
2009-07-10 上传
2021-09-24 上传

stevenjlk
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 平尾装配工作平台运输支撑系统设计与应用
- MAX-MIN Ant System:用MATLAB解决旅行商问题
- Flutter状态管理新秀:sealed_flutter_bloc包整合seal_unions
- Pong²开源游戏:双人对战图形化的经典竞技体验
- jQuery spriteAnimator插件:创建精灵动画的利器
- 广播媒体对象传输方法与设备的技术分析
- MATLAB HDF5数据提取工具:深层结构化数据处理
- 适用于arm64的Valgrind交叉编译包发布
- 基于canvas和Java后端的小程序“飞翔的小鸟”完整示例
- 全面升级STM32F7 Discovery LCD BSP驱动程序
- React Router v4 入门教程与示例代码解析
- 下载OpenCV各版本安装包,全面覆盖2.4至4.5
- 手写笔画分割技术的新突破:智能分割方法与装置
- 基于Koplowitz & Bruckstein算法的MATLAB周长估计方法
- Modbus4j-3.0.3版本免费下载指南
- PoqetPresenter:Sharp Zaurus上的开源OpenOffice演示查看器
