BMI160原版datasheet:低功耗IMU,详尽的加速与角速率测量
需积分: 9 164 浏览量
更新于2024-07-18
收藏 2.66MB PDF 举报
BMI160是一款由Bosch Sensortec生产的高性能小型低功耗加速度计和陀螺仪集成模块(Inertial Measurement Unit,IMU)。这款原版Datasheet提供了全面的技术规格和详细信息,适用于对精确度有高要求的应用场景。以下是该Datasheet的主要内容:
1. 产品概述:
BMI160是一款高度集成的传感器解决方案,它集成了16位数字三轴加速度计和陀螺仪,旨在提供极其准确的加速度(测量物体在三维空间中的加速度变化)和角速率(测量物体旋转速度)数据。由于其小巧的尺寸和低功耗设计,使得它特别适合于电池寿命受限的便携式设备,如智能手机、可穿戴设备和无人机等。
2. 版本信息:
Datasheet版本为0.7,发布日期为2014年12月2日,文档编号BST-BMI160-DS000-06。技术参考代码为0273141187,说明了此文档可能会随着技术的进步而进行更新。
3. 版权与注意事项:
Bosch Sensortec保留所有知识产权,包括工业产权和复制权。文档中的数据和描述可能未经通知就进行修改。产品照片和图片仅用于展示目的,实际产品的外观可能与图片有所差异。此外,文档内的规格是初步的,可能会根据需要进行更改。
4. 功能特性:
- 精度和性能:BMI160的16位数字信号处理确保了高精度的测量结果,对于需要稳定性能和可靠性的应用至关重要。
- 集成度:集成的传感器单元减少了外部组件的需求,简化了系统设计,并提高了整体效率。
- 功耗管理:作为低功耗IMU,它在维持高性能的同时,注重能源效率,这对于能源敏感型设备来说是一项关键优势。
5. 限制与警告:
提供的文档可能存在未公开的更改,用户在设计和实施应用时需注意查阅最新资料。同时,购买者和使用者必须遵守Bosch Sensortec的知识产权协议,不得擅自复制或转交给第三方。
总结,BMI160 Datasheet为工程师提供了设计和集成该IMU的重要信息,包括技术规格、操作指南和注意事项,是开发依赖高精度加速度和角速率数据的电子设备时不可或缺的参考资料。通过深入理解和利用这些信息,设计师可以优化系统性能并确保满足特定的应用需求。
BMI160
Data sheet
Page 16
BST-BMI160-DS000-06 | Revision 0.7 | December 2014 Bosch Sensortec
© Bosch Sensortec GmbH reserves all rights even in the event of industrial property rights. We reserve all rights of disposal such as copying and passing on to
third parties. BOSCH and the symbol are registered trademarks of Robert Bosch GmbH, Germany.
Note: Specifications within this document are preliminary and subject to change without notice.
2.2.5 PMU (Power Management Unit)
The integrated PMU (Power Management Unit) allows advanced power management features
by combining power management features of all built-in sensors and externally available wake-
up devices.
See chapter 2.6.11, PMU Trigger (Gyro).
2.2.5.1 Automatic gyroscope power mode changes
To further lower the power consumption, the gyroscope may be configured to be temporarily put
into sleep mode, which is in BMI160 configurable as suspend or fast-start-up mode, when no
motion is detected by the accelerometer. This mode benefits from the accelerometer any-motion
and nomotion interrupt that is used to control the power state of the gyroscope. To configure
this feature Register (0x6C) PMU_TRIGGER is used.
2.2.5.2 Power management with external geomagnetic sensor
An external magnetometer can be connected via the secondary interface. The drivers support
Bosch Sensortec devices. The PMU allows advanced power management with the external
magnetometer.
Table 10: Supported magnetometer and accelerometer power modes (only horizontal and
vertical transitions are allowed)
Accel
Suspend
Normal
Low power
Magnetometer
Suspend
Supported
Supported
Supported
Normal
Supported
Supported
Supported
Note, for setting the magnetometer to suspend mode it is required to put the magnetometer
itself into suspend mode through the magnetometer interface manual mode mag_man_en in
Register (0x4B-0x4F) MAG_IF and to set the magnetometer interface after that to suspend
using a mag_set_pmu_mode command in the Register (0x7E) CMD. Changing the
magnetometer interface power mode to suspend does not imply any mode change in the
magnetometer.
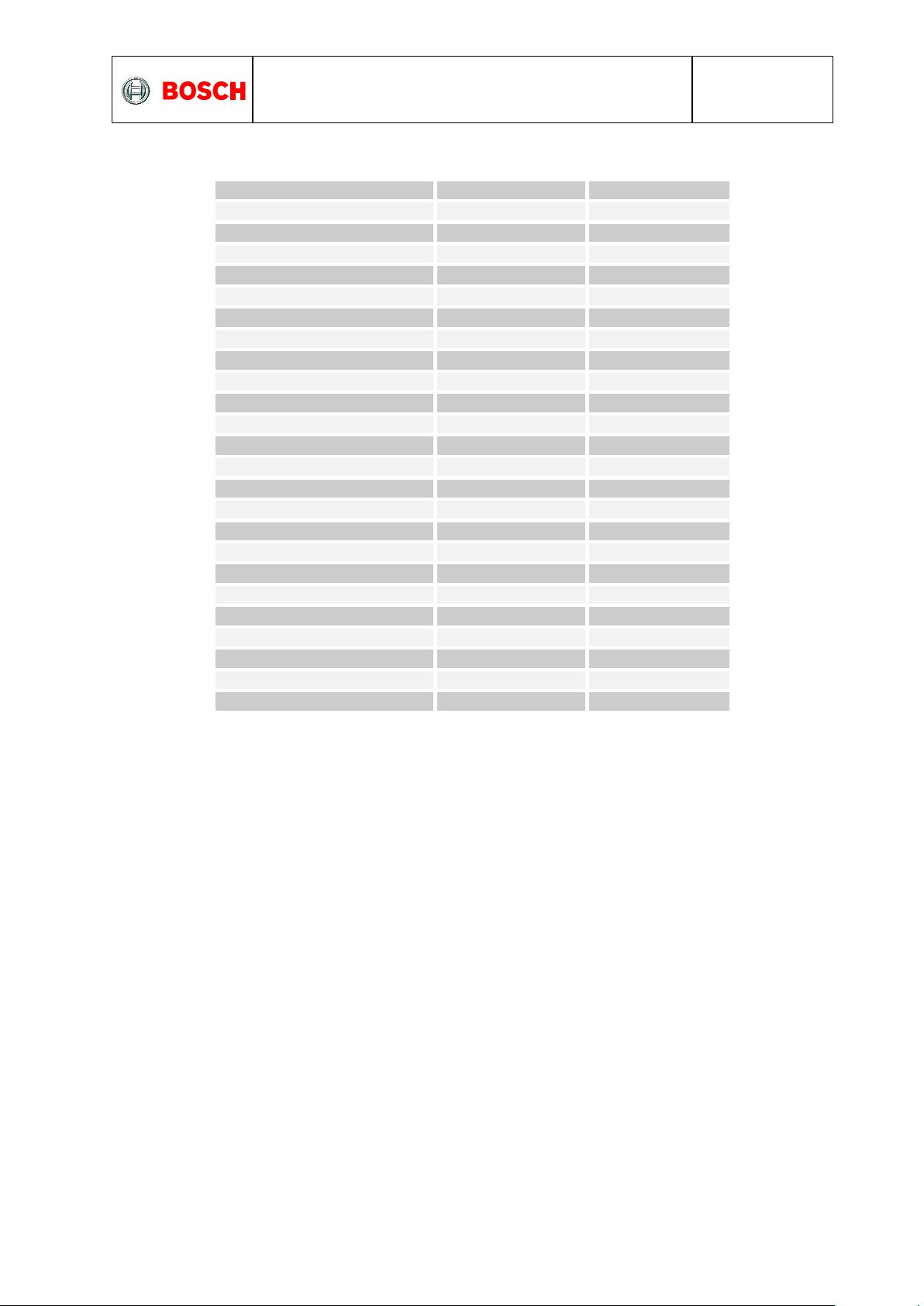
2.3 Sensor Timing and Data synchronization
2.3.1 Sensor Time
The Register (0x18-0x1A) SENSORTIME is a free running counter, which increments with a
resolution of 39 µs. All sensor events e.g. updates of data registers are synchronous to this
register as defined in the table below. With every update of the data register or the FIFO, a bit m
in the Register (0x18-0x1A) SENSORTIME toggles where m depends on the output data rate
for the data register and the output data rate and the FIFO down sampling rate for the FIFO.
The table below shows which bit toggles for which update rate of data register and FIFO. The
time stamps in Register (0x18-0x1A) SENSORTIME are available independent of the power
mode the device is in.

剩余109页未读,继续阅读
125 浏览量
178 浏览量
208 浏览量
280 浏览量
176 浏览量
199 浏览量
2024-07-16 上传


u010228930
- 粉丝: 2
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- React性的
- Distributed-Blog-System:分布式博客系统实现
- CloseMe-crx插件
- 欧式建筑立面图纸
- 北理工自控(控制理论基础)实验报告
- yolov7升级版切图识别
- 作业-1 --- IT202:这是我的第一个网站
- hit-and-run:竞争性编程的便捷工具
- Pytorch-Vanilla-GAN:适用于MNIST,FashionMNIST和USPS数据集的Vanilla-GAN的Pytorch实现
- SNKit:iOS开发常用功能封装(Swift 5.0)
- 创意条形图-手机应用下载排行榜excel模板下载
- 项目36
- 通过混沌序列置乱水印.7z
- reactive-system-design
- getwdsdata.m:从 EPANET 输入文件中获取配水系统数据-matlab开发
- 100多套html模块+包含企业模板和后台模板(适合初级学习)
