图形处理器加速光束平差与高斯-贝叶斯传播
PDF格式 | 1.29MB |
更新于2025-01-16
| 147 浏览量 | 举报
"本文主要探讨了在图形处理器(GPU)中,特别是Graphcore的智能处理单元(IPU)上,如何快速实现光束平差(BA)和高斯贝利夫传播(GBP)方法,这对于计算机视觉和增量SLAM问题至关重要。通过利用IPU的大规模并行计算能力和分布式片上存储器,作者展示了一个简单但完全并行的光束平差实现,能够高效解决大型问题。实验结果显示,与传统的Ceres CPU库相比,IPU在处理BA问题时速度显著提高。此外,研究还表明GBP在处理增量SLAM问题时的潜力,能有效应对复杂成本函数和不同类型的因素。文章强调了硬件设计对于AI和视觉算法的重要性,指出新的处理器架构应具备大规模并行、分布式存储与处理以及低数据传输的特点,以适应快速发展的AI领域需求。"
文章详细介绍了光束平差在图形处理器上的实现。光束平差是计算机视觉中的经典问题,用于优化相机位姿和3D点的估计,通常出现在SLAM(Simultaneous Localization and Mapping,同时定位与建图)系统中。传统上,光束平差的计算密集型使其成为性能瓶颈。然而,借助于Graphcore IPU的并行处理能力,可以显著加速这一过程。
高斯贝利夫传播是一种消息传递算法,常用于因子图优化,能够有效地处理非线性最小二乘问题。在本文中,作者展示了GBP在IPU上的分布式和就地推理能力,这对于解决动态变化的因子图,即代表空间AI问题,具有重大意义。实验结果表明,GBP在处理增量SLAM问题时表现出色,能够处理强非线性和各种类型的因素。
此外,文章指出,尽管通过代码优化可以进一步提高静态问题的处理速度,但真正的价值在于IPU对于动态、一般性问题的灵活优化能力。这为未来的AI和视觉算法设计提供了新的思路,强调了硬件设计应具备的通用性和适应性,以满足不断变化的需求。
这篇文章揭示了新型计算机架构如IPU在优化AI和视觉任务中的潜力,特别是在实时处理和解决复杂问题方面。通过将光束平差和高斯贝利夫传播相结合,可以实现高效的视觉计算,这对实时空间AI应用,如自动驾驶和机器人导航等领域具有深远的影响。
2418
的图形编码的联合分布的因式分解。边际使用迭代本
地消息传递计算,该消息传递在因子节点向变量节点
发送消息和变量节点向因子节点发送消息之间交替见
[5]或[9]的消息传递规则的推导。
通过设计,置信传播在从根节点到叶节点的一次消
息扫描中推断树图的边缘,然后返回。对于循环图,
相同的BP消息传递可以应用于消息传递调度,并且在
多次迭代之后,估计收敛到边缘。循环BP没有收敛保
证,但它通常是稳定的[23]。当分布表示为高斯分布
时,循环高斯置信传播收敛到所有图拓扑的正确边缘
后验均值[32]。
理解为什么置信传播是有效的关键是考虑计算变量
的边际分布的最低效率的方法。简单的方法是取所有
因子的乘积来给出联合分布,然后对所有其他变量进
行边缘化。这种同时边际化所有其他变量的做法代价
高昂;例如,在离散的情况下,如果每个变量
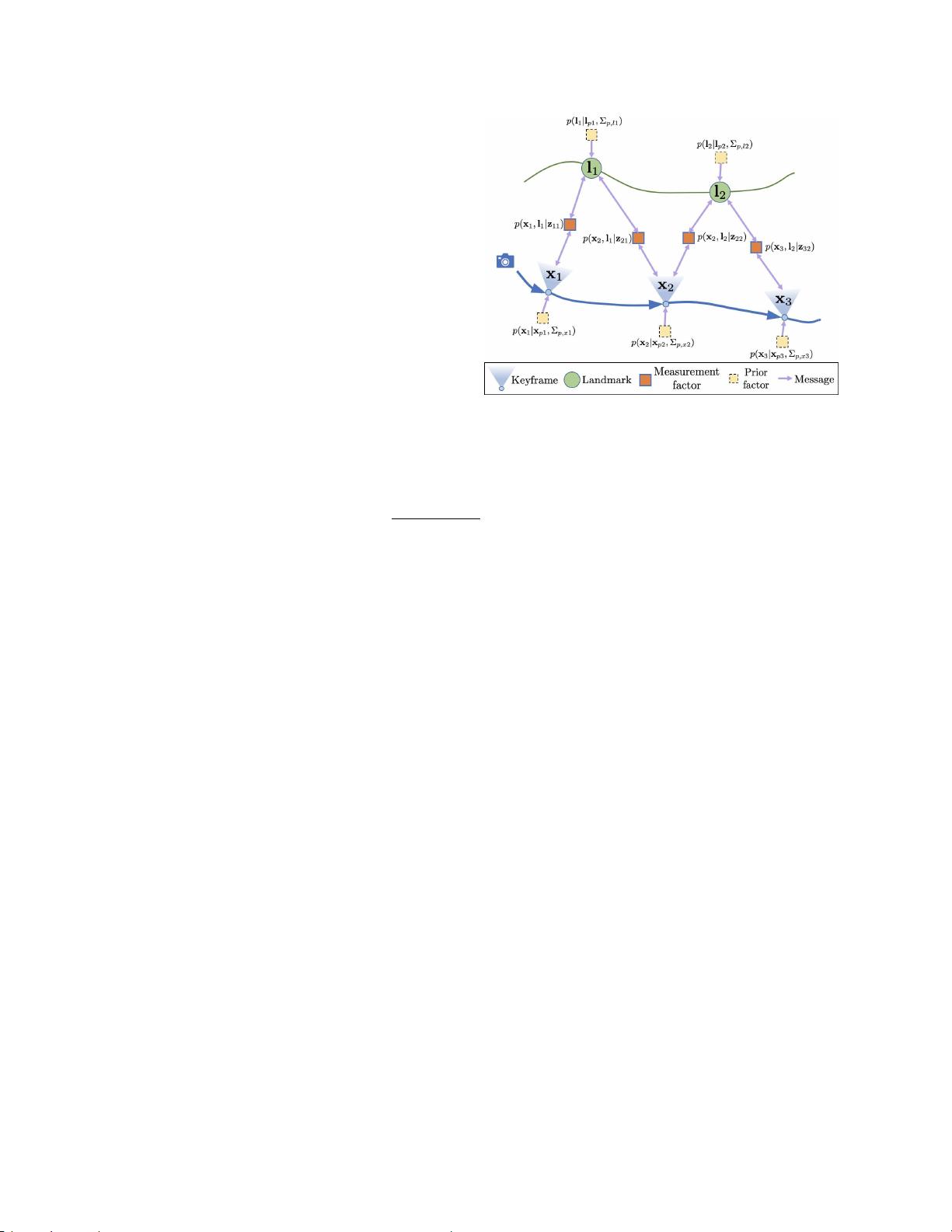
图2:因子图说明。 测量因子连接关键帧和它们观察
到的标志。关键帧和地标实例化与自动生成的弱先验
因子。消息从所有因子发送到相邻的关键帧和界标节
点,并从关键帧和界标节点发送到相邻的测量因子节
点。
able取k
个
离散值,然后对所有值进行边缘化,
一个变量需要对
k
N
v
-1
项求和。 信仰propa-
相反,Gation使用编码在图形拓扑中的条件依赖性信
息对变量的最小独立子集进行边缘
化。 回到离散变
量的例子,如果我们想计算只包含成对因子的树图
的边际分布
,则置信传播只需要对
2
N
f
k
2
项求和。
4.
Bundle调整因子图
束平差是联合细化变量
集合
V
=
X
L
的问题
,其中
X
=
{
x
i
}
i
=1
:
N
k
是
k
个帧姿态的集合,并且
L
=
{
l
j
}
j
=1
:
N
l
是
地标位置的集合,受到一组约束
它定义了我们想要最小化的误差。 具体而言,我们包
括两种类型的误差项:重复错误和先前错误。重投影
误差将界标投影到观察它们的关键帧的图像平面中的
距离与对应于这些观测结果的测量值集合进行归一化
服务
Z
=
{
z
km
}。先验误差项试图最大化当前变量
val
的
概率
从相应的先验分布中提取UE
{N
(
x
i
;
x
p
,
x
p
,
x
i
)
,
N
(
l
j
;
l
p
,
l
j
)
}
i
=1
:
N
,
j
=1
:
N
。 的
100弱于目标中的重投影误差项。我们制定了这使用雅
可比矩阵和测量模型定义的测量约束的强度。一个小
BA问题的示例因子图如图2所示。
在 光 束 法 平 差 中 , 我 们 希 望 执 行 最 大
后 验
(MAP)推断,该推断计算
使联合概率最大化的变
量{
X
,
L
}的配置
p
(
X
,
L
|
Z
):
{
X
,
L
}
=
arg max
p
(
X
,
L
|
(
3
)
{
X
,
L
}
=arg max
p
(
Z
|
X
,
L
)
p
(
X
,
L
)
.
(四)
{
X
,
L
}
在 第 二 行 中 , 我 们 使 用 贝 叶 斯 定 理 并 删 除 分 母 p
(
Z
),因为测量是定量的,并且不影响MAP解决方
案。这导致将我们想要最大化的概率分布(我们将其
称为p
obj
(X
,
L))因式分解为给定变量p(Z)的测
量的似然性的乘积
|X
,
L
)和变量
p
(
X
,
L
)的先验。
如
x
i
和
在我们的公式中,
x
j
是独立的,
l
i
和
l
j
是独立的,
dent
和
x
i
和
l
j
仅在给定
a
的情况下是条件依赖的
i j
k
l
需要优先项来设置monocular问题的总体标度,并调节
来自measure的消息,
测量
z
ij
,这些项可以进一步因式分解:
否则只会限制2的保证因素
p
o
bj
(
X
,
L
)
=
Y
N
k
φ
i
(x
i
)
Y
N
l
θ
j
(
l
j
)
Y
N
k
Y
km
(x
k
,
l
m
)
,
自由度。 给定一个初始化点,
自动生成OR,使其成为因子
i
=1
j
=1
k
=1
m
,
l
m
∈L
k
(五
)
下载后可阅读完整内容,剩余12页未读,立即下载
相关推荐




cpongm
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开








最新资源
- MyBatis自动化代码生成工具使用指南
- 《计算机组成与设计:硬件、软件接口》完整答案解析
- OpenGL库文件及其安装配置指南
- 深入学习Linux与UNIX Shell编程技术
- HTC游戏开发者的开源宝藏:VRTK_Unity3D插件
- 前端JavaScript实现无刷新分页技术集锦
- Halcon技术在实时视频显示中的应用研究
- 蓝牙模块HC-05配置工具:串口调试软件V2.4
- OAuth2.0与Spring Cloud构建高效权限管理系统
- 深入浅出Ganglia监控工具应用与源码解析
- 掌握Oracle SQL分页技术与内置函数应用
- Android动画进度条功能实现与下载指南
- 新唐NUC980代码更新工具NuWriter发布
- 空中鼠标电路与C语言程序解析
- 深入了解C++开源日志库log4cpp及其应用
- Netty入门案例讲解与客户端交互实现











