Linux UART驱动架构详解:串口终端的核心封装
32 浏览量
更新于2024-08-28
收藏 173KB PDF 举报
本文主要分析了Linux设备模型中的UART驱动架构。在Linux系统中,串口(serial)设备,特别是UART驱动,是终端控制台通信的关键部分,它负责处理异步通信。UART,全称为Universal Asynchronous Receiver and Transmitter,中文译为通用异步收发器,是串口设备驱动的封装层,简化了驱动程序开发者的工作。
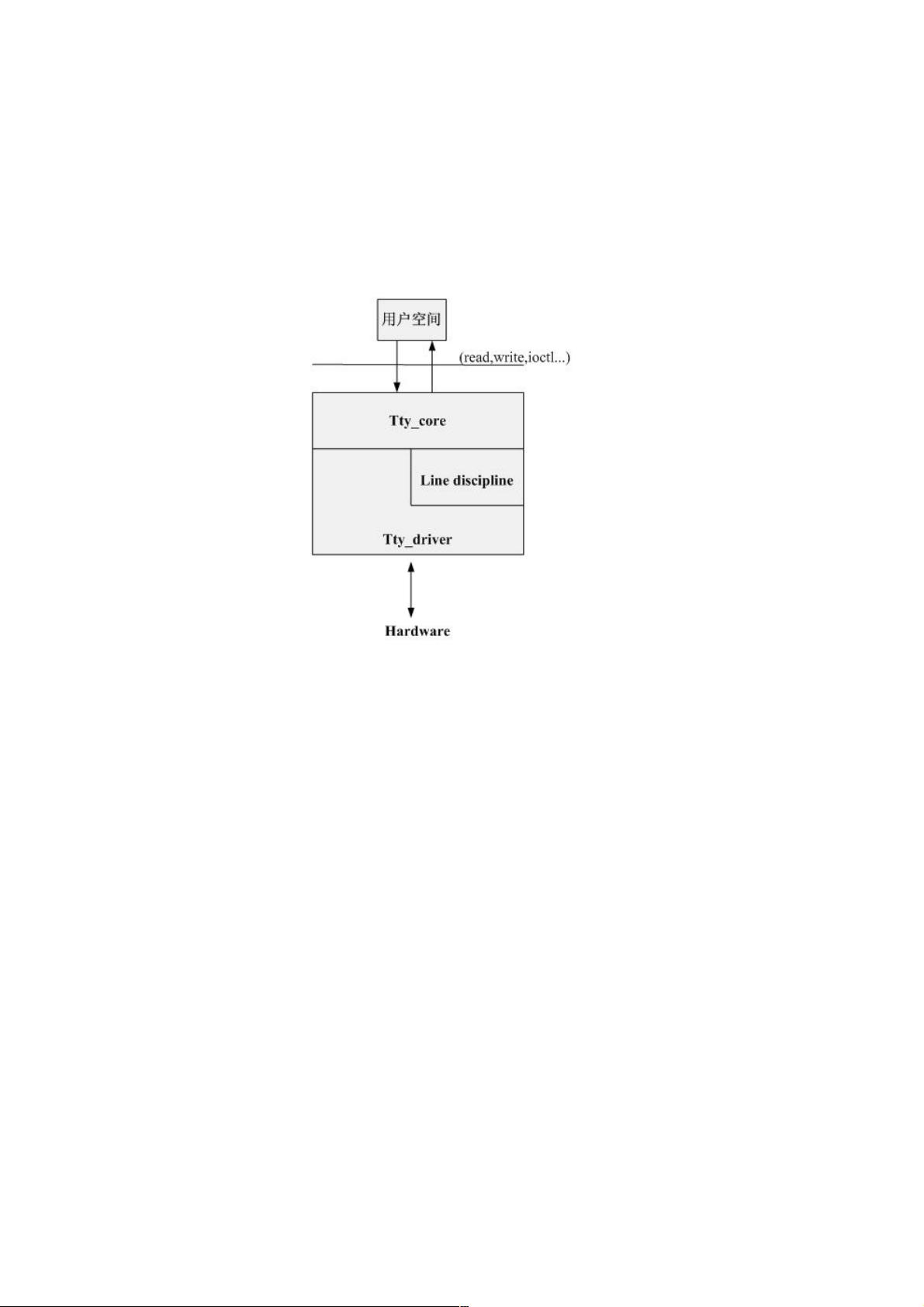
首先,文章提到在分析serial驱动之前,理解UART驱动架构至关重要。UART驱动架构可以看作是tty_driver的扩展,如图所示,其核心操作通过uart_port进行管理。写入数据时,数据会被放入名为circ_buf的环形缓冲区,uart_port从中取出数据并发送到串口设备。接收数据时,数据被添加到相应line discipline的缓存区中,这样使得驱动开发者只需要关注uart_port接口函数的实现,而无需关心整个通信流程的复杂性。
其次,文章强调了数据结构在UART驱动中的重要性。一个典型的UART驱动会注册多个设备号,如/dev/ttyS0和/dev/ttyS1,每个设备节点对应实际硬件的特定串口。要解决的问题是如何确保每个设备文件与多个uart_port正确关联,并且区分不同的设备操作。为此,驱动中可能需要一个类似tty->ttys的数组,其中每个元素代表一个tty_struct,用于存储与特定uart_port相关的数据。
此外,每个uart_port都有自己的circ_buf,这意味着在设计驱动时,需要确保uart_port实例与这些缓冲区紧密相连,以便正确处理数据传输。回顾tty驱动,这里可能涉及到tty_struct中用于管理串口设备信息的字段,这些字段的配置和交互对于驱动的正确运行至关重要。
理解Linux中的UART驱动架构包括了理解设备节点的映射、如何通过uart_port进行数据流管理和维护复杂的设备数据结构。驱动开发者在编写时,应专注于底层接口的实现,并利用这些数据结构来实现高效、可靠的串口通信功能。
linux设备模型之设备模型之uart驱动架构分析驱动架构分析
一:前言
接着前面的终端控制台分析,接下来分析serial的驱动。在linux中,serial也对应着终端,通常被称为串口终端。在shell上,我
们看到的/dev/ttyS*就是串口终端所对应的设备节点。
在分析具体的serial驱动之前。有必要先分析uart驱动架构。uart是Universal Asynchronous Receiver and Transmitter的缩
写。翻译成中文即为”通用异步收发器”。它是串口设备驱动的封装层。
二:uart驱动架构概貌
如下图所示:
上图中红色部份标识即为uart部份的操作。
从上图可以看到,uart设备是继tty_driver的又一层封装。实际上uart_driver就是对应tty_driver.在它的操作函数中,将操作转入
uart_port.
在写操作的时候,先将数据放入一个叫做circ_buf的环形缓存区。然后uart_port从缓存区中取数据,将其写入到串口设备中。
当uart_port从serial设备接收到数据时,会将设备放入对应line discipline的缓存区中。
这样。用户在编写串口驱动的时候,只先要注册一个uart_driver.它的主要作用是定义设备节点号。然后将对设备的各项操作
封装在uart_port.驱动工程师没必要关心上层的流程,只需按硬件规范将uart_port中的接口函数完成就可以了。
三:uart驱动中重要的数据结构及其关联
我们可以自己考虑下,基于上面的架构代码应该要怎么写。首先考虑以下几点:
1: 一个uart_driver通常会注册一段设备号。即在用户空间会看到uart_driver对应有多个设备节点。例如:
/dev/ttyS0 /dev/ttyS1
每个设备节点是对应一个具体硬件的,从上面的架构来看,每个设备文件应该对应一个uart_port.
也就是说:uart_device怎么同多个uart_port关系起来?怎么去区分操作的是哪一个设备文件?
2:每个uart_port对应一个circ_buf,所以uart_port必须要和这个缓存区关系起来
回忆tty驱动架构中。tty_driver有一个叫成员指向一个数组,即tty->ttys.每个设备文件对应设数组中的一项。而这个数组所代码
的数据结构为tty_struct. 相应的tty_struct会将tty_driver和ldisc关联起来。
那在uart驱动中,是否也可用相同的方式来处理呢?
将uart驱动常用的数据结构表示如下:
下载后可阅读完整内容,剩余8页未读,立即下载
2023-05-11 上传
2023-05-11 上传
2023-03-16 上传
2023-05-11 上传
2023-05-17 上传
2024-07-25 上传

weixin_38614636
- 粉丝: 1
- 资源: 914
 我的内容管理
展开
我的内容管理
展开







最新资源
- 小程序源码A商城.rar
- wgap-flesch-kincaid:Flesch-Kincaid可读性评分器,用于按承诺的方式写得很好
- BitmapVisualizer:显示位图的调试器扩展
- jQuery鼠标响应式手风琴特效.zip
- xueji:小小的学籍管理系统
- json-complete:JSON替代品,它保留引用,处理循环依赖关系并编码标准JavaScript可用的几乎所有数据类型
- 毕业设计作品_声音报警电路.rar
- 行业分类-设备装置-一种平板整体式太阳能热水器.zip
- js-fizzbuzz-web-0615-public
- 基于ASP.NET MVC的Web管理系统设计源码
- hiro切换身份共5页.pdf.zip
- amia:案件牵连图生成器amia
- 高斯求积代码matlab-convection-diffusion:一维对流扩散码
- DogRescue-开源
- SoundCloud_Forward:SoundCloud转发
- CSharp1SeuleInstance_c#wpfDA_CsharpOneInstance_zip_
