51单片机+PCF8591控制舵机及数码管显示角度实验
84 浏览量
更新于2024-09-02
1
收藏 281KB PDF 举报
"51单片机控制舵机实验,结合PCF8591 ADDA芯片和电位器,实现PWM波形控制舵机旋转并显示角度"
在这个实验中,我们将探讨如何使用51系列单片机来控制舵机,并在过程中利用PCF8591 ADDA(模拟数字转换)芯片以及电位器。51单片机是一种广泛应用的微控制器,具有丰富的外设接口和灵活的编程能力,非常适合进行基础的嵌入式系统设计。
PCF8591 ADDA芯片是一个集成的模拟输入/输出接口,能够通过I2C(Inter-Integrated Circuit)协议与微控制器通信。在这个实验中,它被用来读取电位器的电压值。电位器是一个可变电阻,它的电阻值变化可以对应不同的角度,因此可以作为角度传感器使用。当电位器转动时,其输出电压会改变,PCF8591将这个电压转换成数字信号供51单片机处理。
51单片机通过解析来自PCF8591的数字信号,生成PWM(脉宽调制)波形,PWM波形的占空比决定了舵机的旋转角度。舵机会根据接收到的PWM信号的宽度来调整其转轴的位置。PWM波形的高电平时间越长,舵机旋转的角度越大。因此,通过改变电位器的电阻,可以改变PWM波的占空比,从而控制舵机在0°到180°之间的旋转。
实验中还提到了在数码管上显示角度。数码管通常由7个段组成,可以通过驱动每个段的亮灭状态来显示0到9的数字。程序中的"Datatab"数组包含了7段数码管的共阴极段码,使得单片机可以驱动数码管显示对应的数值。根据ADtemp变量(存储了经过AD转换后的电压值)和电位器的特性,可以计算出对应的角度,并在数码管上显示出来。
程序中还包括了延时函数`mDelay`,用于实现基本的时间延迟,这对于控制PWM波的频率和稳定舵机的工作非常重要。同时,`Init_Timer0`函数初始化了定时器0,这通常用于生成PWM波或者实现定时功能,例如在特定时间间隔更新PWM波的占空比。
总结来说,这个实验涵盖了51单片机的I2C通信、模拟量处理、PWM波形生成以及显示界面的设计,是学习嵌入式系统和单片机控制的经典案例。通过实践,学习者不仅可以掌握舵机的基本控制,还能了解模拟信号处理和数字信号显示的相关知识。
51单片机控制舵机实验单片机控制舵机实验
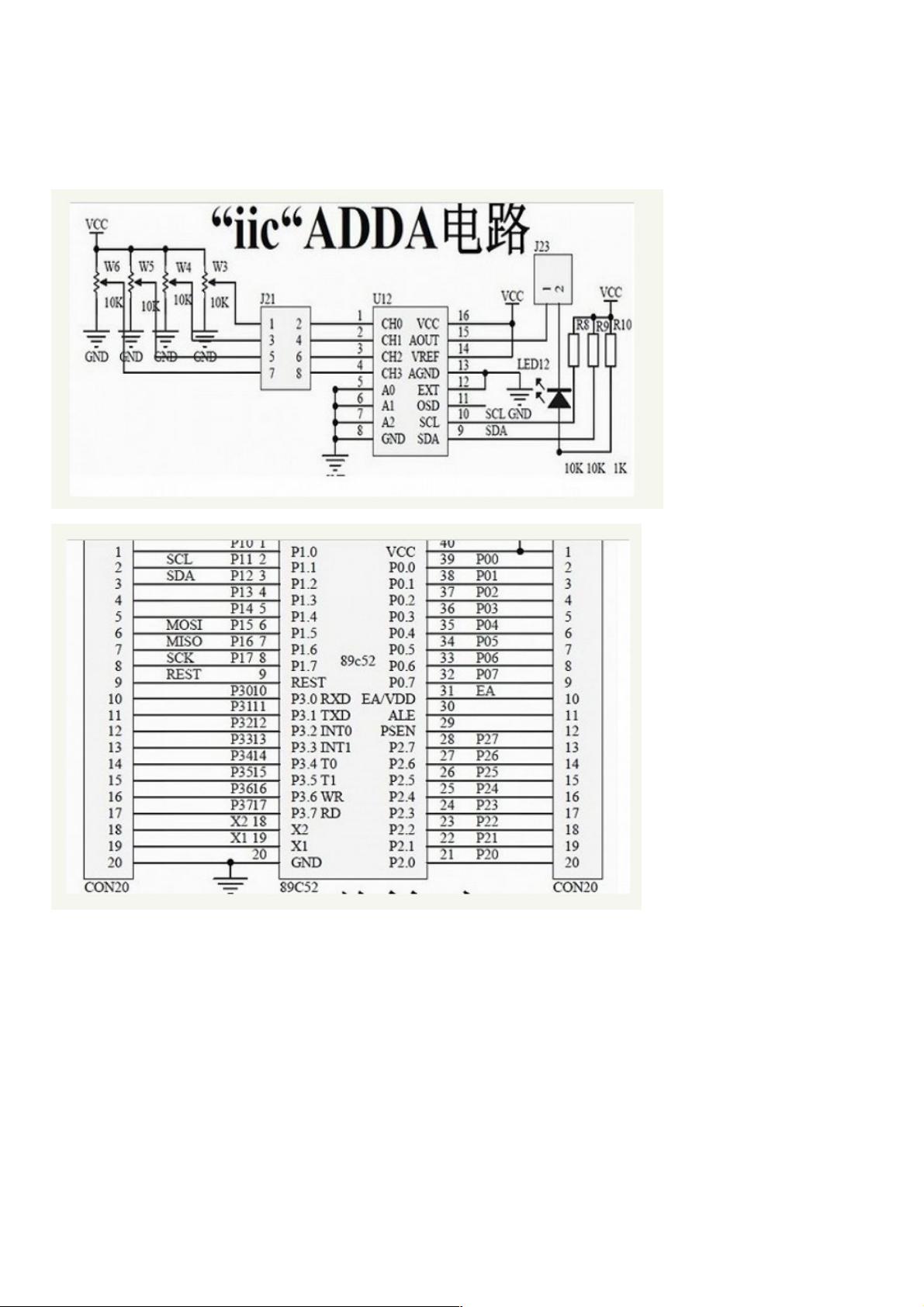
这里用到PCF8591 ADDA芯片和51单片机和一个电位器。通过控制电位器,产生PWM波,控制舵机旋转。并在
数码管上显示角度。
电路图
下载后可阅读完整内容,剩余7页未读,立即下载
1149 浏览量
270 浏览量
568 浏览量
234 浏览量
535 浏览量
380 浏览量
1149 浏览量
524 浏览量
2021-10-02 上传

weixin_38553478
- 粉丝: 7
- 资源: 923
 我的内容管理
展开
我的内容管理
展开







最新资源
- List Issues-crx插件
- lokalise:从lokali.se检索本地化文件的工具
- TP002-控制LED灯翻转.zip
- 监控程序运行进程及系统CPU运行状态异常重启
- AprendeIngles:Proyecto App应用程序
- Mind-Robot:我正在构建一个意念控制机器人,使用 android、arduino 和 Mindwave 耳机
- 2021年毕业设计 (计算机科学与技术专业).zip
- plchdr-kt:Kotlin中的简单占位符生成器
- TP005-按键控制LED灯翻转.zip
- TabMania-crx插件
- librebook:使用Flutter构建的最小前端库创世客户端
- 易语言文件目录管理系统
- auspost:澳大利亚邮政网站库
- API菜单类-易语言
- javascript-technical-documentation:这是有关JavaScript某些方面的简短技术文档。 使用HTML和CSS制作
- 毕业设计.zip
