传感器网络中随机延迟非线性系统的分布式高斯滤波算法
155 浏览量
更新于2024-08-26
收藏 1.24MB PDF 举报
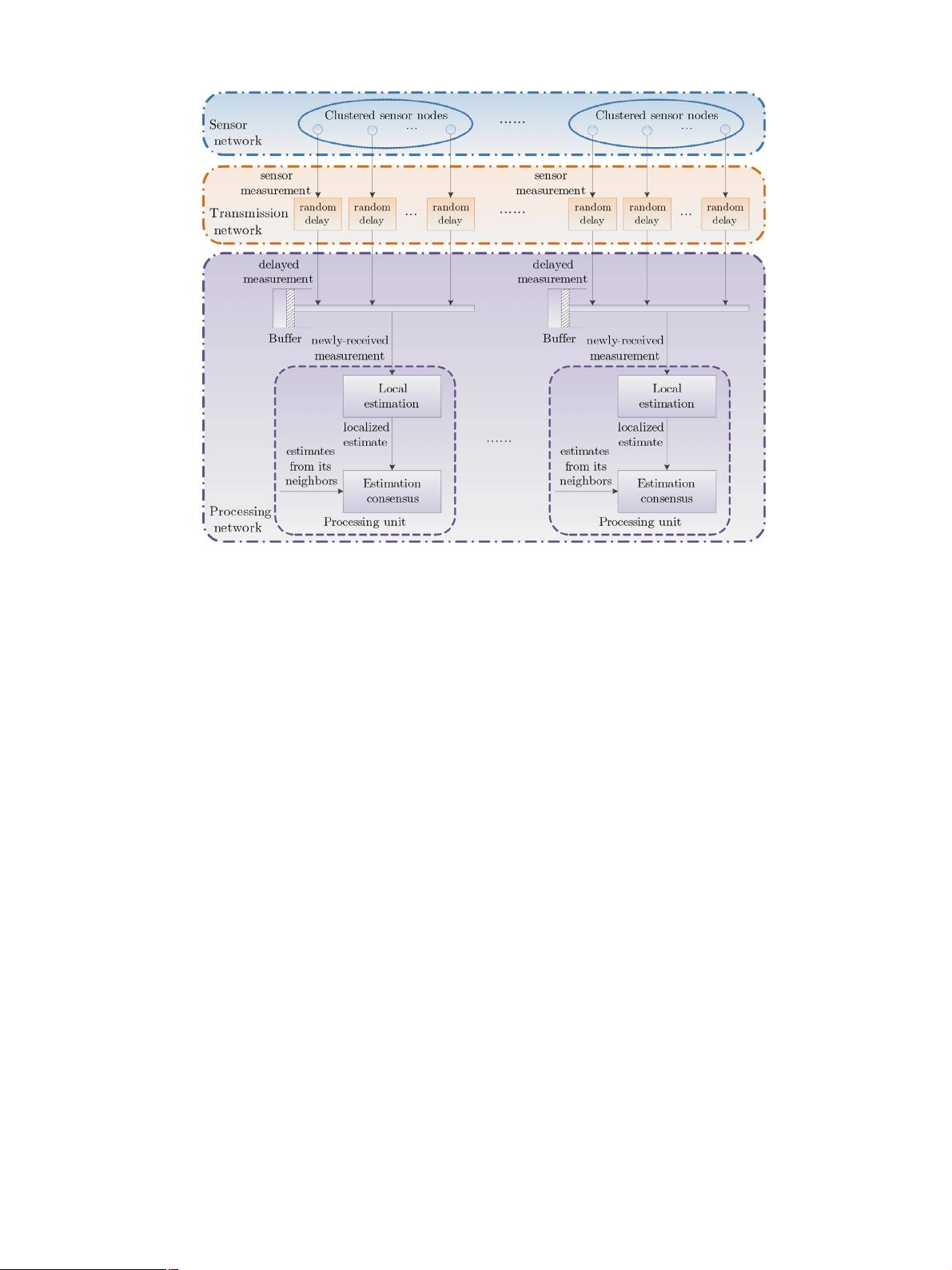
"这篇研究论文探讨了在传感器网络中非线性系统具有随机延迟测量的高斯共识滤波器设计问题。传感器网络中的各个节点通过数据传输网络将测量数据发送到远程处理网络,其中测量延迟遵循马尔科夫链模型。论文提出了一个分散式状态估计方法,以解决这种情况下系统的估计问题。"
在传感器网络中,大量的分布式传感器用于收集环境或物理系统的实时信息。这些传感器可能受到各种因素的影响,如通信限制、硬件故障或网络拥塞,导致测量数据存在随机延迟。在这种背景下,传统的滤波算法(如卡尔曼滤波)可能无法有效地处理这些延迟,因为它们通常假设测量和通信是即时的。
高斯共识滤波器是一种适用于非线性系统的概率滤波方法,它结合了高斯近似和共识算法。在本文中,研究人员提出了一种新的高斯共识滤波框架,以适应传感器网络中随机测量延迟的情况。该框架的关键在于利用马尔科夫链来建模测量延迟的动态行为,这允许滤波器根据延迟的概率分布进行更新,从而提高了估计的准确性。
首先,论文介绍了随机延迟的马尔科夫链模型,这个模型能够描述测量数据在传输过程中可能出现的各种延迟状态及其转换概率。接着,他们设计了一种分散式的滤波算法,使得每个传感器节点可以根据其自身的测量信息以及相邻节点的估计信息来更新其状态估计。这种方法允许网络中的节点之间通过局部通信共享信息,形成共识,同时考虑到延迟的影响。
然后,论文详细讨论了如何在非线性系统中应用高斯近似,以简化滤波器的计算复杂性。通过利用第一和第二阶矩的信息,他们可以将非线性问题转化为线性化问题,进而实现有效的状态估计。
在性能分析部分,作者可能展示了新滤波器在不同延迟条件下的收敛性和稳定性。此外,可能还包括了与传统方法的比较,证明了在存在随机延迟时,所提出的高斯共识滤波器在跟踪性能和鲁棒性方面的优越性。
最后,论文可能还包含了一些数值模拟或实际案例研究,以验证所提算法在实际传感器网络中的效果,并可能讨论了未来的研究方向,如进一步提高滤波效率或应对更复杂的网络拓扑结构。
这篇研究论文为传感器网络中处理随机延迟测量问题提供了一种创新的解决方案,对于理解并改进分布式系统的状态估计具有重要意义。
Y. Yang et al. / Information Fusion 30 (2016) 91–102 93
Fig. 1. Problem formulation.
is given:
min(k+1,s
m
)
j=0
γ
m
j,k+1
= 1. (5)
Moreover,
γ
m
j,k+1
is uncorrelated with x
0
, w
k
and v
k
in the corre-
sponding sensor node.
Remark 1. It is easily testified that our proposed system (1)-(5)
in a PU can be degraded to the nonlinear system without de-
layed measurements if P
{γ
m
0,k
= 1} = 1andP{γ
m
j,k
= 1} = 0for j =
1, ··· , min
(k, s
m
). Moreover, the proposed system without mea-
surement delay is also a common nonlinear system in networked
sensors. On the other hand, our system in the mth PU will be de-
graded to the nonlinear system with randomly Bernoulli delayed
measurements if
γ
m
i,k
and γ
m
j,t
are mutually uncorrelated for any k
= t, due to that the Bernoulli process is only a special case for this
Markov process [28]. Furthermore, it is equivalent to the model
in [22,23] with P
{γ
m
j,k
= 1} = 0forj = 2, ··· , min(k, s
m
), or to the
model in [25] for j = 3, ··· , min
(k, s
m
).
Except for the decentralized and distributed structure of pro-
cessing network, model nonlinearity, stochastic parameters and
mode uncertainty caused by random delay coexist in the consid-
ered system. Thus, the filter to be designed should own not only
the decentralized structure, but also the ability for joint state esti-
mation and parameter identification in the nonlinear case. Based
on it, the GCF is proposed in the following section to pursue a
tradeoff between estimation accuracy and computation cost. It is
expected to obtain not only a novel and generalized GAF for non-
linear systems with randomly delayed measurements in a single
PU, but also a scalable and distributed fusion among multiple PUs.
Remark 2. The GAF is a convenient and widely used filter in non-
linear cases [14,23]. The Gaussian density belongs to the expo-
nential family and will still be Gaussian after any linear trans-
formation. This makes the recursive operation being available and
the corresponding GAF is analytical, under reasonable Gaussian as-
sumptions. Therefore, in the considered problem, it is rational to
design a novel GAF considering random delay in the single PU to
obtain an accuracy estimate performance. Meanwhile, due to the
existence of random delay, the posterior probability of delay is also
identified.
Remark 3. Based on the novel GAF in a single PU, the following
three considerations prompt us to give the following decentralized
structure. Firstly, the decentralized structure is needed in mas-
sive data processing, which can support the multi-core processing
or cooperative processing of multiple distributed computing units.
Secondly, the computation efficiency is expected to be greatly
improved because the consensus strategy avoids computation-
intensive cross-covariance calculations among local estimate errors
in distributed fusion [29–32]. Thirdly, PUs are always geographic
proximity and have high-speed data exchange links, which can
support information interaction of consensus iteration.
3. Gaussian-consensus filter for nonlinear systems with
randomly delayed measurements in sensor networks
In this part, we will firstly derive the GEDPF for nonlinear sys-
tems with randomly delayed measurements in a PU, and then the
GCF will be presented based on the GEDPF to obtain an asymptot-
ically consistent estimate in the whole processing network.
3.1. Gaussian approximated filter in a single processing unit
In this subsection, we will derive the local estimation in the
mth PU. For simplicity, the superscript “m” is omitted without con-
fusion here, for example,
λ
m
ij,k+1
is simplified as λ
ij,k+1
.
Denote the obtained measurement sequence
{y
1
, ··· , y
l
} as Y
1: l
.
Define
ˆ℘
k|l
:= E(℘
k
|Y
1:l
), P
℘
k,t
|l
:= cov(℘
k
,
t
|Y
1:l
) = E( ˜℘
k|l
˜
t|l
),
剩余11页未读,继续阅读
2021-03-12 上传
2020-07-13 上传
2015-05-13 上传
2021-03-09 上传
2021-03-16 上传
2021-04-05 上传
2021-03-16 上传
2021-04-11 上传
185 浏览量

weixin_38588854
- 粉丝: 11
- 资源: 958
 我的内容管理
展开
我的内容管理
展开







最新资源
- 深入浅出:自定义 Grunt 任务的实践指南
- 网络物理突变工具的多点路径规划实现与分析
- multifeed: 实现多作者间的超核心共享与同步技术
- C++商品交易系统实习项目详细要求
- macOS系统Python模块whl包安装教程
- 掌握fullstackJS:构建React框架与快速开发应用
- React-Purify: 实现React组件纯净方法的工具介绍
- deck.js:构建现代HTML演示的JavaScript库
- nunn:现代C++17实现的机器学习库开源项目
- Python安装包 Acquisition-4.12-cp35-cp35m-win_amd64.whl.zip 使用说明
- Amaranthus-tuberculatus基因组分析脚本集
- Ubuntu 12.04下Realtek RTL8821AE驱动的向后移植指南
- 掌握Jest环境下的最新jsdom功能
- CAGI Toolkit:开源Asterisk PBX的AGI应用开发
- MyDropDemo: 体验QGraphicsView的拖放功能
- 远程FPGA平台上的Quartus II17.1 LCD色块闪烁现象解析
