AUTOSAR架构详解:组件、工具链与关键模块
需积分: 44 165 浏览量
更新于2024-08-04
1
收藏 4.25MB PPTX 举报
AUTOSAR(AUTomotive Open System ARchitecture)是汽车电子控制单元(ECU)软件架构的标准,它提供了一种模块化、可重用和可扩展的方式来设计和开发汽车电子系统。本文将深入探讨AUTOSAR的架构组成,工具链使用,以及在Vector Davinci平台上的应用。
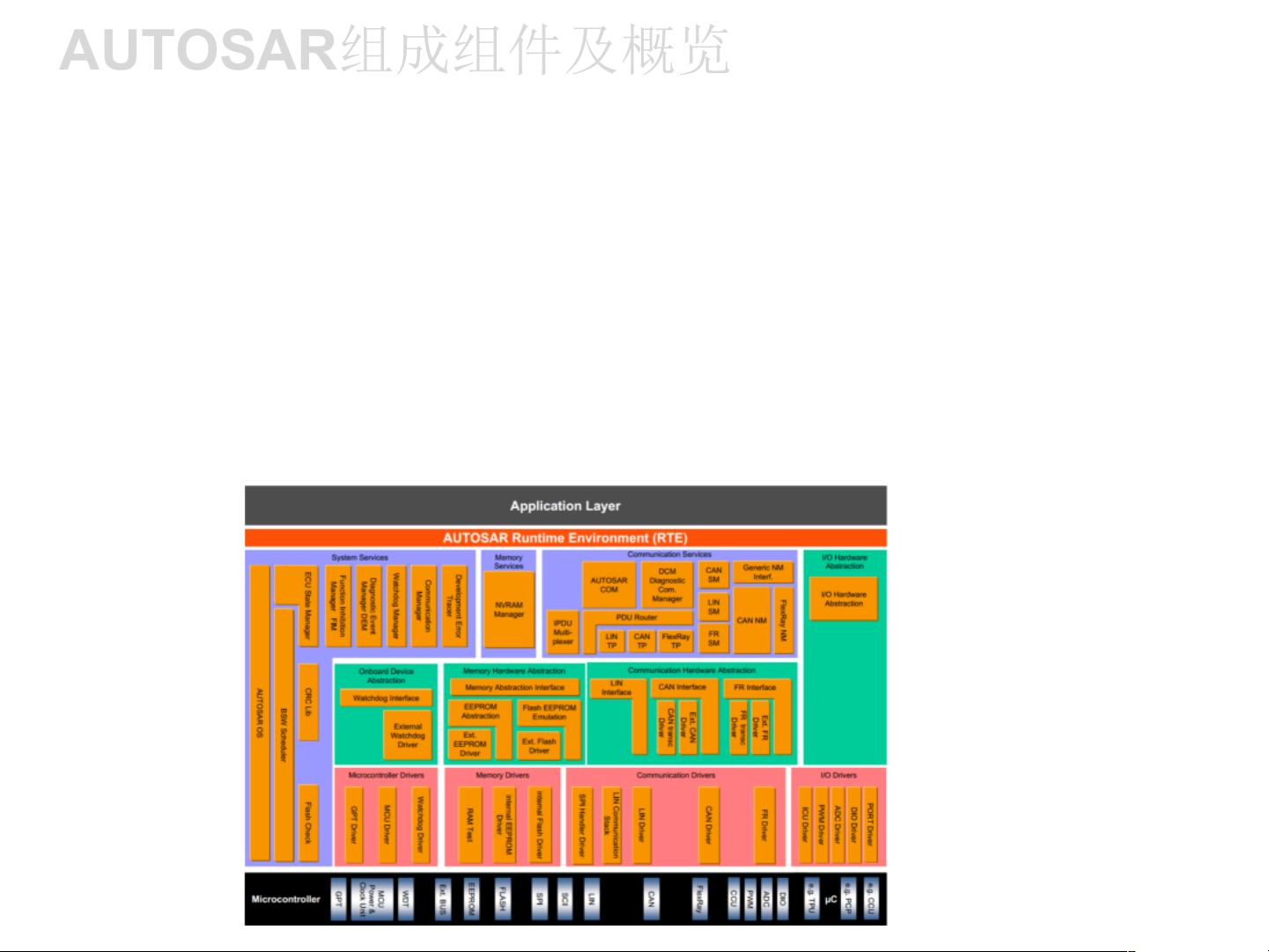
AUTOSAR架构主要由三个核心部分构成:
1. 基础软件(Base Software, BSW):这是AUTOSAR架构的基础,包括MCAL(Microcontroller Abstraction Layer),它由芯片制造商提供,用于实现与硬件紧密相关的驱动程序,如功能模块访问、内存管理、通信和I/O操作。MCAL提供了一个标准化的接口,使得不同的微控制器能无缝协作。
2. 运行时环境(Runtime Environment, RTE):RTE是AUTOSAR架构的关键层,它负责系统级的协调和管理。它处理软件组件(Software Components, SWCs)之间的通信,包括宏映射、API调用、全局缓存管理以及数据队列的控制。RTE还包含了基本的服务模块,如网络管理、内存管理、通信管理、IO访问和故障诊断,以及OSAPI的映射,这些都确保了软件的高效运行。
3. 应用层(SWC):这是最顶层,包含应用程序组件,实现了特定应用功能。SWCs通过Sender/Receiverports和Client/Serverports定义其接口,前者用于数据输出,后者用于服务提供或请求。每个SWC都有一个或多个Runnable,即运行实体,它们在特定事件触发时执行,比如周期性任务或数据接收后的响应。
在Vector Davinci平台上,开发者可以利用工具链来构建和配置AUTOSAR系统。例如,通过RTE,开发者可以使用Simulink等工具搭建应用框架,并将其映射到实际硬件上。SWCs的定义和连接是在Davinci Developer中完成的,确保了接口的标准化,方便不同SWC之间的集成。
AUTOSAR层间接口的设计是至关重要的,它定义了标准接口,如Standardized AUTOSAR Interface,用于应用程序和基础软件之间的交互,如ECU管理和诊断事件管理。这些接口确保了软件的互操作性和可移植性,降低了系统复杂度并提高了维护性。
AUTOSAR架构的学习和工具链的使用对于汽车行业的软件开发来说,提供了强大的灵活性和一致性,有助于实现高效、安全和可靠的汽车电子系统。通过理解并熟练掌握这一架构,开发者能够更有效地构建复杂的汽车电子系统,并适应不断变化的技术需求。
AUTOSAR
AUTOSAR
组
组
成
成
组
组
件
件
及
及
概
概
览
览
基础软件:
实现MCU驱动的MCAL
独立于硬件的具备通用功能的服务模块
对隔离硬件的抽象驱动接口模块
软件组件:
特定于ECU硬件设计的IO抽象组件
有高时序要求的复杂驱动组件
实现硬件应用功能的传感器执行器组件
实现应用功能的应用程序组件
RTE运行时环境
OS
下载后可阅读完整内容,剩余9页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-09-10 上传
2021-10-15 上传
2024-06-19 上传
119 浏览量
2022-07-15 上传
点击了解资源详情

Delphi_Eric
- 粉丝: 126
- 资源: 15
 我的内容管理
展开
我的内容管理
展开







