测地线算法综述:复杂几何处理的关键技术
需积分: 18 73 浏览量
更新于2024-06-30
1
收藏 39.8MB PDF 举报
测地线路径和距离算法综述是一篇针对三维模型中复杂几何问题的研究文章,它探讨了在曲率显著影响下,如何在数字几何处理、科学计算、计算机图形学和计算机视觉等领域进行精确的测地线(即曲线域上最短路径)数值计算以及相关的测地线距离。相比于传统的欧氏距离计算,这些问题的求解更具挑战性,因为曲率的存在会导致最短路径的行为变得难以预测,并且在实际应用中,目标领域的表示往往不是精确的,而是基于近似模型构建。
文章指出,尽管面临困难,近年来的研究者们已经开发出了众多先进的算法,使得即使在相对大型的模型上也能实现快速的测地线信息查询。这些方法主要分为几个关键类别:
1. 网格方法:通过将曲面划分为多边形网格,然后在每个网格区域内近似计算局部的测地线路径。这种方法的优点是易于实现,但可能牺牲精度,尤其是在复杂曲率区域。
2. 有限元方法:利用有限元素理论将连续的曲面离散为多个节点,通过解决相应的偏微分方程来找到局部测地线。这种方法提供更精确的结果,但计算成本通常较高。
3. 局部逼近与优化:基于局部特征,如切向量和曲率,采用迭代优化技术寻找最佳路径。这类方法能够在一定程度上保持精度,同时减少全局搜索的复杂性。
4. 数据结构与搜索算法:例如A*搜索算法或者Dijkstra算法的变形,结合启发式信息,可以在大规模空间中高效找到近似测地线路径。这类方法适合实时应用,但可能存在一定的误差。
5. 概率方法:利用随机过程,如布朗运动或随机游走,来模拟测地线行为。虽然可能得到非确定性的结果,但在某些情况下,它们能够提供有用的近似。
6. 深度学习与机器学习:近年来,这些技术也被用于学习测地线路径和距离的模型,通过训练神经网络,可以从大量数据中自动捕捉复杂关系,适用于大数据集和高维度场景。
总结来说,测地线路径和距离算法的研究是当前计算机图形学和计算机辅助设计中的一个重要课题,不断有新的思想和技术涌现,以满足日益增长的应用需求。本文通过对各种方法的深入分析,不仅概述了现有成果,还揭示了未来可能的研究方向和挑战。
K. Crane, M. Livesu, E. Puppo, Y. Qin / A Survey of Algorithms for Geodesic Paths and Distances
For each vertex i 2 V, the angle defect is the quantity
W
i
:= 2p
Â
ijk2F
q
jk
i
,
where q
jk
i
denotes the interior angle at vertex i of triangle ijk, and
the sum is taken over all triangles ijk containing vertex i. Intu-
itively, this quantity captures the “flatness” of the vertex, and is
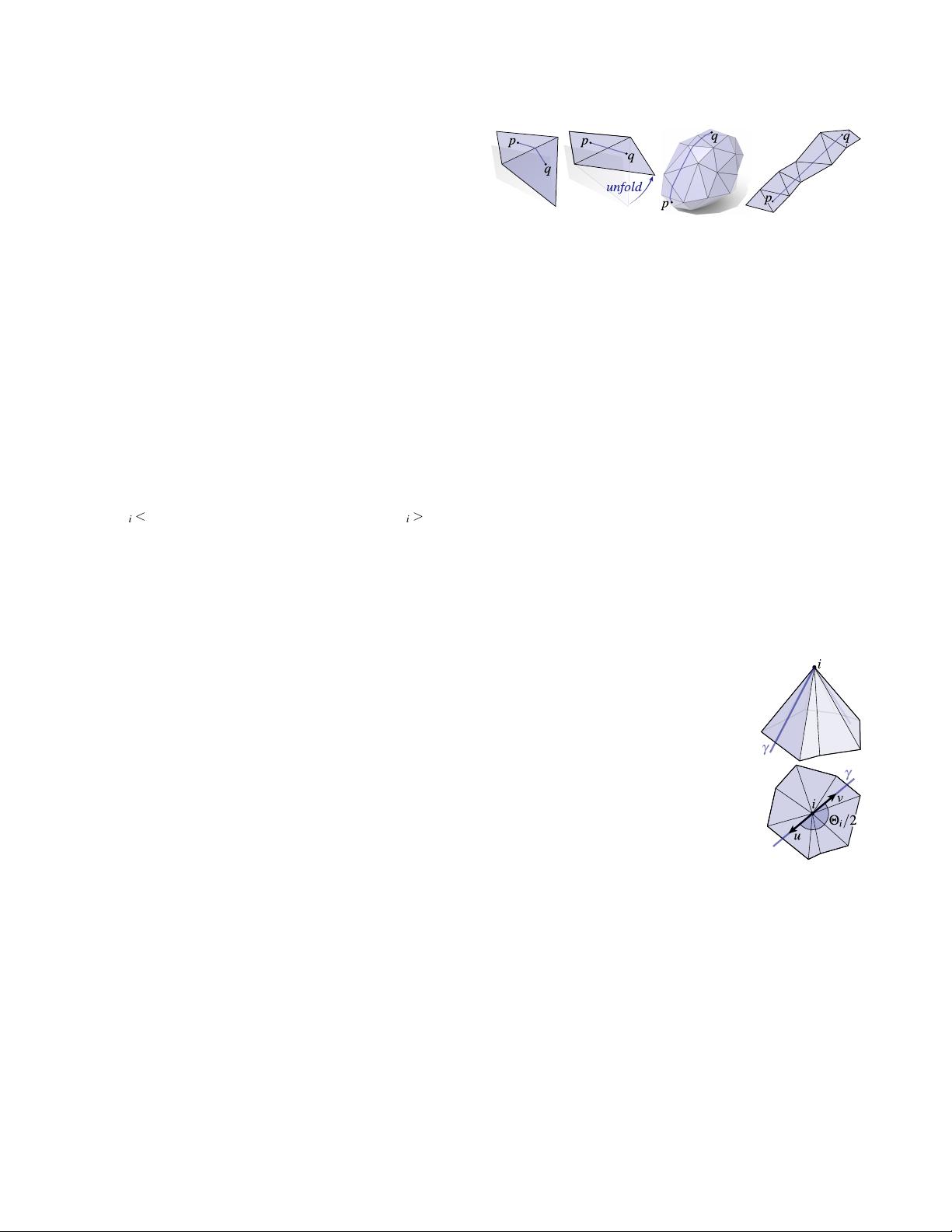
often viewed as a discrete analogue of the Gaussian curvature. An
important mental image is provided in Fig. 4: imagine that the tri-
angles around a vertex i 2 V are flat pieces of paper glued together
along edges. Depending on the value of W
i
, these triangles can be
bent into a smooth circular cone, a flat circular disk, or a saddle-
like figure, all without changing geodesic distance. We will there-
fore refer to vertices with positive, zero, and negative angle defect
as spherical or cone-like, Euclidean, and hyperbolic or saddle-like,
respectively. This local picture nicely encapsulates the intrinsic ge-
ometry of any polyhedron: it is smooth and intrinsically flat away
from the vertices—even the location of edges is irrelevant when it
comes to thinking about geodesics and geodesic distance, since the
edges are effectively invisible to an intrinsic observer. The sign of
W plays an especially important role in the context of polyhedral
geodesics, since shortest geodesics will often pass through vertices
where W
i
< 0, but can never pass through vertices where W
i
> 0 (as
will be discussed in Sec. 2.2.1).
Working with polyhedral rather than smooth surfaces has some
interesting geometric consequences. On the one hand, since each
individual triangle is flat, we can study geodesics by “unfolding”
local neighborhoods into the plane, i.e., by finding an arrange-
ment of vertices in R
2
that agrees with the intrinsic edge lengths—
several examples are shown in Fig. 4. This picture makes it clear
that, locally, geodesics on polyhedral surfaces can be constructed
by simply drawing line segments in the Euclidean plane. The main
computational challenge, therefore, is answering more global ques-
tions: for example, which sequence of triangles must we unfold to
find the shortest such line? An analogous perspective is not gener-
ally not available for smooth surfaces, since any local flattening will
invariably distort lengths (i.e., geodesics are rarely straight lines in
local coordinates). On the other hand, the fact that our surface is no
longer smooth makes the definition of polyhedral geodesics some-
what more nuanced—especially in the vicinity of vertices.
2.2.1. Shortest vs. Straightest
In the smooth setting we had two equivalent characterizations of
geodesic curves: they are both straightest (Sec. 2.1.3) and locally
shortest (Sec. 2.1.2). As studied by Polthier & Schmies [PS98],
these two characterizations are no longer equivalent in the poly-
hedral setting. This situation reflects a common “no free lunch”
scenario in the discretization of objects from differential geome-
try [CW17], namely that one typically cannot find a single defini-
tion (in this case, for discrete geodesics) that exactly captures all
the key properties of the original smooth object (in this case, both
straightest and locally shortest).
Locally, polyhedral geodesics essentially behave the same as in
the smooth setting. Consider for instance a pair of points p,q con-
tained in the same triangle—here geodesics are just ordinary line
segments, which are both shortest and straightest. Likewise, for two
Figure 5: Any pair of adjacent triangles can be unfolded into the
plane without distorting distance (left). A geodesic on a polyhedral
surface is therefore equivalent to a straight line along some planar
triangle strip—so long as it does not pass through any vertices.
points p,q close to a common edge (and away from any vertex) we
can simply unfold the two incident triangles into the plane and con-
nect them by the unique shortest, straightest segment (see Fig. 5,
left). Globally, however, the situation is more complicated due to
non-smooth points at vertices.
Straightest. To find the straightest path leaving a point p 2 M in
a direction u 2 T
p
M, we can simply apply the local observations
made above: inside a given triangle the shortest path is found by
extending a straight ray along u; to continue this path into the next
triangle we can imagine unfolding neighboring triangles into the
plane and extending this ray into the next triangle. The resulting
path corresponds to a straight line along a strip of planar trian-
gles, as depicted in Fig. 5, right. (Note that for very long paths
we may encounter the same triangle more than once, in which case
we would have multiple copies of this triangle in the unfolding.)
This tracing operation effectively defines a discrete version of the
exponential map discussed in Sec. 2.1.4.
What should we do if our path enters a ver-
tex i 2 V? In particular, which outgoing direc-
tion describes the “straightest” curve? Unless
the angle defect W
i
is equal to zero, we can-
not simply unfold triangles into the plane. An
idea considered by Polthier & Schmies [PS98]
is to instead pick the outgoing direction such
that there is “equal angle” on either side. More
precisely, let u be the incoming direction; we
can define the outgoing direction v as the one
such that the total angle between u and v is ex-
actly half the sum Q
i
:=
Â
ijk
q
jk
i
of interior an-
gles q
jk
i
at vertex i (see inset figure). Equiva-
lently, one can work in a local polar coordinate system where angles
q
jk
i
are normalized to sum to 2p; this viewpoint has been carefully
studied by Troyanov [Tro86], and was later adopted in geometry
processing for problems involving polyhedral geodesics [PS98] and
tangent vector fields at vertices [ZMTT06]; Sharp et al. [SSC18,
Section 5.2] provides a concise description. As in the smooth case,
this definition of straightness yields a unique solution to the initial
value problem, even for paths through vertices with nonzero angle
defect.
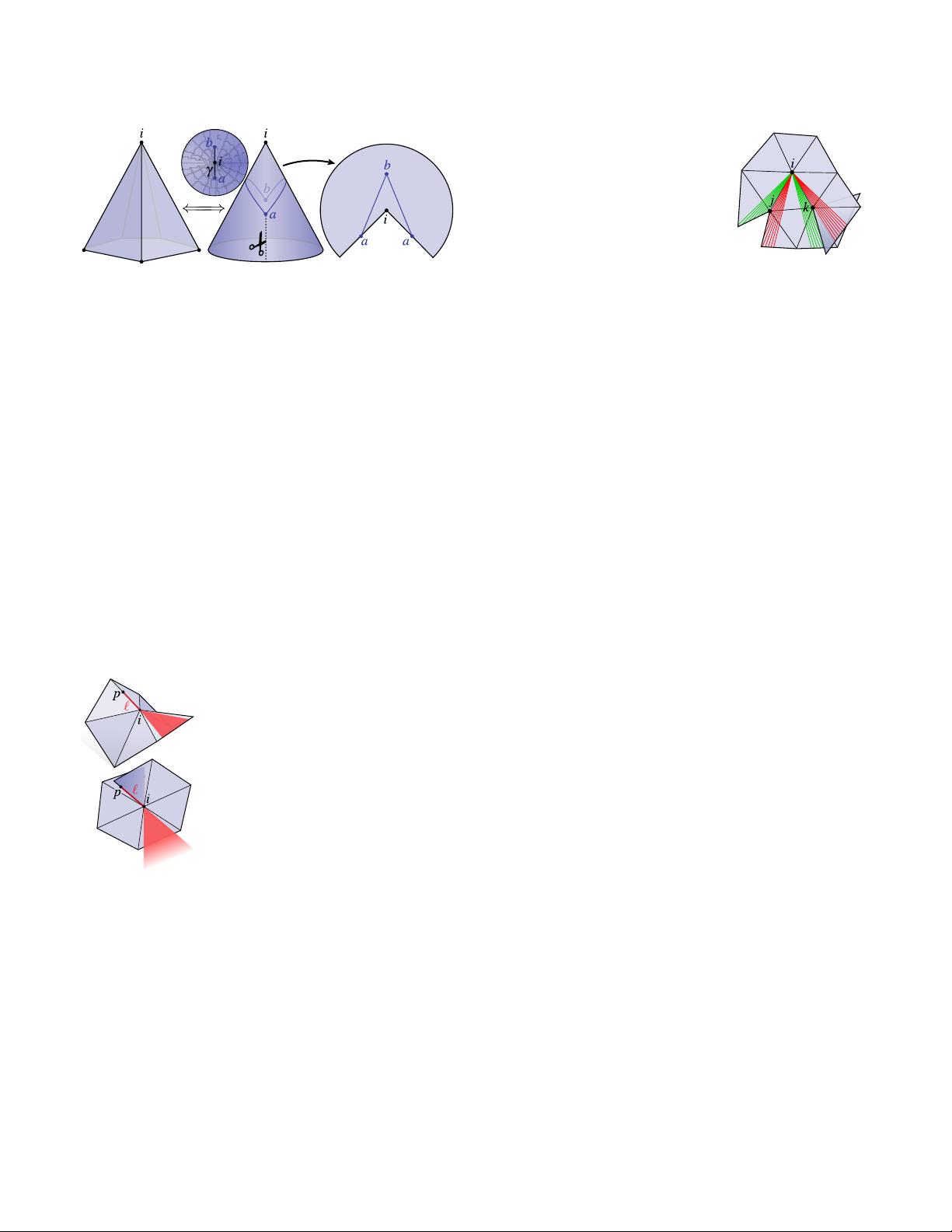
Shortest. In contrast, the behavior of shortest curves on a polyhe-
dral surface depends critically on the sign of the angle defect W
i
.
Consider for instance two points a,b directly opposite a cone-like
vertex (W
i
> 0), as depicted in Fig. 6. By symmetry, one might ex-
pect that the shortest route between these points is to walk along
c
2019 The Author(s)
Computer Graphics Forum
c
2019 The Eurographics Association and John Wiley & Sons Ltd.
剩余32页未读,继续阅读
2023-12-16 上传
2023-07-18 上传
2023-07-08 上传
2023-03-29 上传
2023-03-29 上传
2023-09-11 上传
2023-07-08 上传
2023-04-05 上传

老猿的春天
- 粉丝: 97
- 资源: 55
 我的内容管理
展开
我的内容管理
展开







最新资源
- Postman安装与功能详解:适用于API测试与HTTP请求
- Dart打造简易Web服务器教程:simple-server-dart
- FFmpeg 4.4 快速搭建与环境变量配置教程
- 牛顿井在围棋中的应用:利用牛顿多项式求根技术
- SpringBoot结合MySQL实现MQTT消息持久化教程
- C语言实现水仙花数输出方法详解
- Avatar_Utils库1.0.10版本发布,Python开发者必备工具
- Python爬虫实现漫画榜单数据处理与可视化分析
- 解压缩教材程序文件的正确方法
- 快速搭建Spring Boot Web项目实战指南
- Avatar Utils 1.8.1 工具包的安装与使用指南
- GatewayWorker扩展包压缩文件的下载与使用指南
- 实现饮食目标的开源Visual Basic编码程序
- 打造个性化O'RLY动物封面生成器
- Avatar_Utils库打包文件安装与使用指南
- Python端口扫描工具的设计与实现要点解析
