MATLAB仿真实现PWM直流调速系统设计与分析
"PWM脉宽调制直流调速系统设计及MATLAB仿真验证"
PWM脉宽调制(Pulse Width Modulation)技术是现代电力电子和电机控制领域中的关键方法之一,广泛应用于直流调速系统中。该技术通过改变脉冲宽度来调整输出电压的平均值,从而实现对负载的精细控制。在本设计中,目标是建立一个基于MATLAB的转速和电流双闭环控制的H型双极式PWM直流调速系统。
首先,设计目标包括理解和掌握PWM直流调速系统的工作原理以及如何利用MATLAB进行系统仿真。具体来说,系统采用H型桥式可逆PWM变换器,这是一种由四个全控型电力电子器件(通常是IGBT或MOSFET)组成的电路结构,可以实现电动机的正反转控制,并通过改变脉冲宽度来调整电动机的转速。
双极式PWM调速系统的特点在于,电流始终连续,电动机可以在四个象限运行,这使得它能够实现正反转及制动功能。此外,微振电流能消除静摩擦死区,提高低速时的平稳性和调速范围。然而,这种控制方式的缺点是开关器件的开关损耗较大,且需防止上、下桥臂直通,通常需要在驱动脉冲间引入逻辑延时。
系统的核心是转速和电流双闭环控制。转速环作为外环,负责设定和跟踪期望的电机转速,通常由速度调节器(ASR)构成。电流环作为内环,控制电机的电枢电流,确保电流稳定,通常由电流调节器(ACR)实现。两个调节器的输出电压分别控制PWM波形的占空比,以调整电枢电压和电机转速。
在MATLAB仿真过程中,需要计算电流环和转速环的参数,包括调节器的增益、截止频率等。一旦参数确定,即可编写MATLAB代码来模拟双闭环系统的动态响应。在仿真中,将绘制启动时的转速、起动电流、直流电压Ud、ASR和ACR输出电压的波形,同时考虑ACR限幅值的情况,以观察系统在不同条件下的性能。
对于仿真分析,需要比较有无ACR限幅值时系统的行为,分析其对系统稳定性、响应速度和电流波形的影响。这有助于优化控制器参数,以实现更好的动态性能和鲁棒性。通过这种方式,设计者可以深入理解PWM调速系统的工作机制,并为实际应用提供理论依据和实验数据。
本设计涵盖了从理论基础到实践操作的全过程,通过MATLAB仿真工具,加深了对PWM脉宽调制技术在直流调速系统中的应用和控制策略的理解。
(4)低速平稳性好,系统的调速范围大;
(5)低速时,每个开关器件的驱动脉冲仍较宽,有利于保证器件的可靠导通。
2 双极式控制方式的不足之处是:
在工作过程中,4 个开关器件可能都处于开关状态,开关损耗大,而且在切换时可
能发生上、下桥臂直通的事故,为了防止直通,在上、下桥臂的驱动脉冲之间,应设置
逻辑延时。
2.3 转速、电流双闭环系统原理
2.3.1 双闭环调速系统结构图
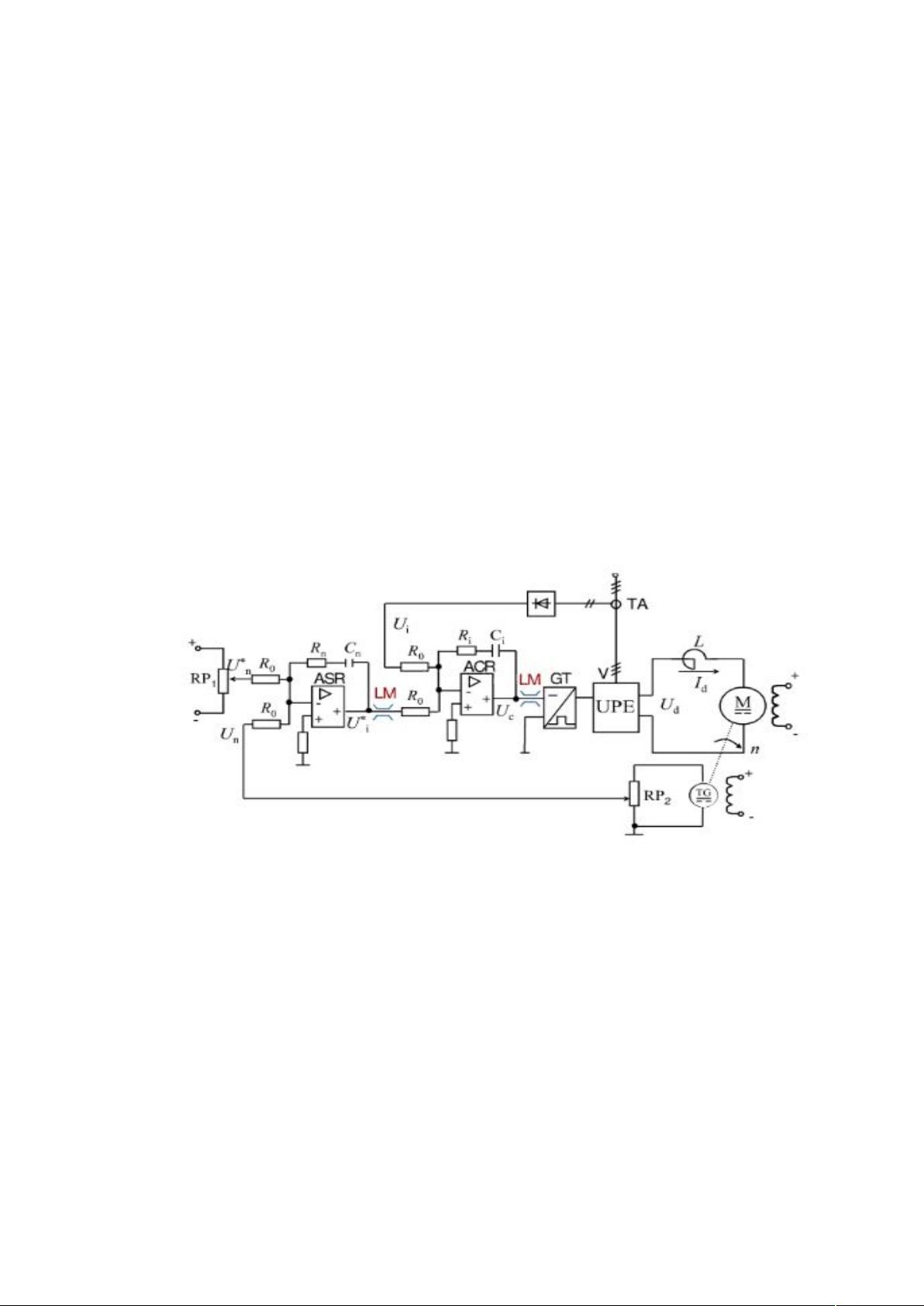
转速、电流双闭环直流调速系统的结构图如图 2-2 所示。
图 2-2 转速、电流双闭环直流调速系统的结构图
图中,把转速调节器的输出当作电流调节器的输入,在用电流调节器的输出去控制
电力电子变换器 UPE,从闭环结构上看,电流环在里面,称作电流内环;速度换在外边,
称作转速外环。这就形成了转速、电流双闭环调速系统。
2.3.2 双闭环调速系统稳态结构图
双闭环调速系统稳态结构图如图 2-3 所示。
3
剩余14页未读,继续阅读
2021-10-05 上传
2023-06-28 上传
2024-01-09 上传
2023-12-28 上传
2023-07-15 上传
2023-09-19 上传
2023-07-28 上传
2023-07-11 上传

疾风步vcn
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 新型智能电加热器:触摸感应与自动温控技术
- 社区物流信息管理系统的毕业设计实现
- VB门诊管理系统设计与实现(附论文与源代码)
- 剪叉式高空作业平台稳定性研究与创新设计
- DAMA CDGA考试必备:真题模拟及章节重点解析
- TaskExplorer:全新升级的系统监控与任务管理工具
- 新型碎纸机进纸间隙调整技术解析
- 有腿移动机器人动作教学与技术存储介质的研究
- 基于遗传算法优化的RBF神经网络分析工具
- Visual Basic入门教程完整版PDF下载
- 海洋岸滩保洁与垃圾清运服务招标文件公示
- 触摸屏测量仪器与粘度测定方法
- PSO多目标优化问题求解代码详解
- 有机硅组合物及差异剥离纸或膜技术分析
- Win10快速关机技巧:去除关机阻止功能
- 创新打印机设计:速释打印头与压纸辊安装拆卸便捷性
