电脑鼠路径规划与控制技术深度解析:嵌入式微控制器与算法研究
需积分: 9 19 浏览量
更新于2024-07-27
收藏 4.56MB DOCX 举报
本文主要探讨了电脑鼠(micromouse)在走迷宫路径规划及控制方面的深入研究。电脑鼠作为一种集成了嵌入式微控制器、传感器和机械运动部件的微型机器人,其核心在于能够在复杂的迷宫环境中自主导航,寻找并选择最优路径到达预设的目标位置。这项技术不仅考验了参赛者的编程能力,还融合了电子工程、计算机科学以及人工智能等多个领域的知识。
论文首先回顾了电脑鼠的历史发展,阐述了它的起源,以及随着科技的进步,其硬件构成如何逐步优化,以适应更高精度和效率的迷宫探索。硬件方面,关键组件包括微控制器作为决策中心,用于处理传感器输入的数据,以及各种类型的传感器,如红外感应器,用于感知周围环境和障碍物。
在软件设计方面,作者着重讲解了以下几个关键环节:
1. 等高图制作:通过处理环境数据,电脑鼠会构建一个虚拟的等高图,帮助理解和分析迷宫地形,以便进行路径规划。
2. 电脑鼠冲刺与转弯:研究了如何设计控制算法,使得电脑鼠能够迅速直线前进和精确转弯,避免碰撞。
3. 电脑鼠搜索:采用搜索算法,如深度优先搜索(DFS)或广度优先搜索(BFS),寻找最短路径或者最佳路径。
4. 相对方向与绝对方向转变:确保电脑鼠在移动过程中能够准确判断自身位置,切换到全局坐标系,以实现更精准的路径调整。
5. 墙壁资料存储:通过记录已访问过的区域,电脑鼠可以避免重复路径,提高效率。
6. 电脑鼠搜索策略:探讨了基于机器学习的搜索策略,如A*算法,以动态调整路径规划,适应不断变化的环境。
在整个研究过程中,作者强调了嵌入式系统的电路设计、传感器的精确控制、单片机程序开发以及算法设计的重要性,这些都是成功实现电脑鼠走迷宫的关键要素。最后,论文还针对实际研究中遇到的问题进行了讨论,并分享了解决方案和经验总结,这对于初学者来说是一份宝贵的入门指南。
通过深入研究电脑鼠走迷宫路径规划及控制,读者不仅可以了解机器人技术的基本原理,还能提升对嵌入式系统、计算机视觉和人工智能等领域理论与实践的理解。这项研究对于培养未来在物联网、自动化控制和机器人技术领域的专业人士具有重要的教育价值。

天津工业大学 2011 届本科生毕业设计(论文)
第二章 迷宫的算法
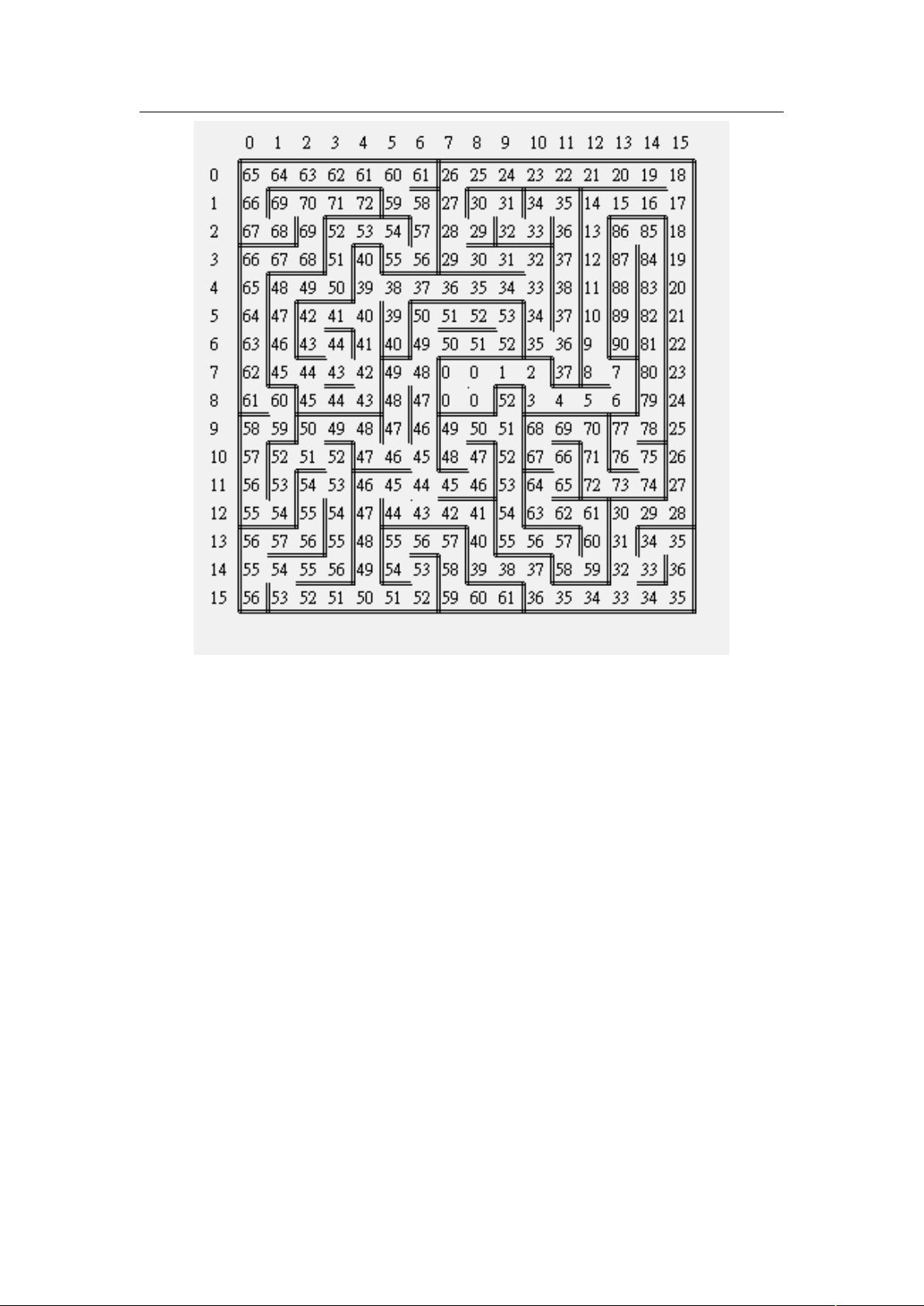
2.1 迷宫坐标和方向
为
了让电脑鼠记住所走过的各个迷宫格的信息,需要使用坐标对 256 个迷宫格进
行编号。
规
定以电脑鼠放到起点时的方向为参照,此时电脑鼠的正前方为 Y 轴正方向。迷
宫格与坐标的对应关系如图 2.1 所示。
根
据坐标的定义和比赛规则可知,电脑鼠的起点可在迷宫的四个角落的点上,但
是无法确定起点的具体坐标。解决方法是根据电脑鼠第一次检测到的转弯口是
在右方还是左方判断。如果电脑鼠第一个检测到的拐弯口是在它的右方( 迷宫的
四个角落中有两个角落是这种情况) ,那么它从(0,0) 点出发; 如果第一个检测
到的拐弯口在它的左边(迷宫的四个角落中有两个角落是这种情况) ,那么它从
(15,0) 出发。图 2.2 是判断起点流程图。
6

剩余63页未读,继续阅读
2024-11-03 上传
154 浏览量
122 浏览量
2024-10-29 上传
2024-10-26 上传
2024-10-29 上传

lengeux
- 粉丝: 1
- 资源: 25
 我的内容管理
展开
我的内容管理
展开







最新资源
- 吉菲探索者
- 保险行业培训资料:地县级地区中端福寿连连销售逻辑
- frontend-react
- IEC101-103-104规约分析程序.rar
- 保险行业培训资料:从需求的角度看产品
- rms-list-gen
- DIU:乌苏里奥大学接口处
- tinyMCE:向 WordPress TinyMCE 添加自定义按钮
- 创维电视酷开系统14U系列8S26刷机应用工具包
- hex-to-rgb:将彩色十六进制值转换为rgb
- my-gridsome-app
- nexus-3.20.1-01-win64.rar
- nwis:对 nw.js GUI API 的 IntelliSense 支持
- materiaFramework:项目构建器,基于html POST请求
- IM Café-开源
- conquer_the_world:【打天下篇】工作知识纪要
