Xarm 7轴机械臂正逆运动学分析详解与D-H建模
需积分: 5 53 浏览量
更新于2024-08-03
1
收藏 1.28MB PDF 举报
在"Xarm 7轴机械臂正逆运动学分析"这篇文章中,研究焦点集中在七轴机械臂的运动控制上,特别是其正逆运动学分析。机械臂运动控制涉及三个关键步骤:
1. 路径规划(Path Planning):这是第一步,目标是找到机械臂从初始位置到目标位置的最优路径,这需要考虑环境因素如障碍物,同时优化运动时间、能耗等性能指标。路径规划结果是一个离散的点序列。
2. 轨迹规划(Trajectory Planning):在此阶段,通过插值技术,如多项式插值或样条插值,将离散路径点转化为连续、平滑的轨迹,以满足动力学约束、运动平顺性和精度要求,确保机械臂运动过程的流畅性。
3. 运动学反解(Inverse Kinematics, IK):这是核心部分,它根据轨迹规划得到的连续轨迹,通过计算找出使机械臂末端到达指定位置所需的关节角度组合。运动学反解利用机械臂的几何结构和运动学模型,确保了从起始位置到目标点的精确运动。
文章特别提到了D-H建模方法,这是一种常用的技术,用于建立机械臂的连杆坐标系,通过链杆参数(如α、d、θ、L)来描述各关节之间的相对关系。对于Xarm机械臂,作者进行了改进的D-H建模,并展示了具体参数。正运动学分析则探讨了如何从已知的关节角度出发,计算出末端执行器的确切位置和姿态。
在正运动学中,给定所有关节的角度,可以唯一确定末端执行器的位置,而逆运动学则相反,是从目标位置反向推算出关节的角度配置。这两部分在机械臂控制系统的规划和执行模块中至关重要,共同保证了机械臂的高效、精确操作。理解并掌握这种分析方法对于机械臂的设计、控制和应用具有重要意义。
2.2 机械臂运动学分析
在机械臂运动控制中,通常遵循以下步骤:
(1)路径规划(Path Planning):确定机械臂从起始点到目标点之间的最
优路径。路径规划可以考虑环境中的障碍物,避免碰撞,并优化一些性能指标如
运动时间、能耗等。路径规划的结果是一个离散的路径,由一系列路径点组成。
(2)轨迹规划(Trajectory Planning):将路径规划得到的离散路径点进
行插值,生成平滑的连续轨迹。轨迹规划通常考虑机械臂的动力学约束、运动平
滑性和精确性等因素。插值算法可以是多项式插值、样条插值等,以保证机械臂
在运动过程中的平滑性和连续性。
(3)运动学反解(Inverse Kinematics):根据轨迹规划得到的连续轨迹,
进行运动学反解,求解机械臂各个关节的运动角度。运动学反解是根据机械臂的
几何结构和运动学模型,通过数学方法计算出使得机械臂末端达到目标点的关节
角度。
可以实现机械臂从起始点到目标点的运动控制。路径规划和轨迹规划主要考
虑运动的路径和平滑性,而运动学反解则是将目标点转化为关节角度,以实现机
械臂的准确运动。这些步骤通常在机械臂控制系统中的规划和执行模块中进行。
因为不同的机械臂运动学反解的过程和结果不一样,针对本文使用的机械臂,
下面进行 D-H 建模和运动学分析。
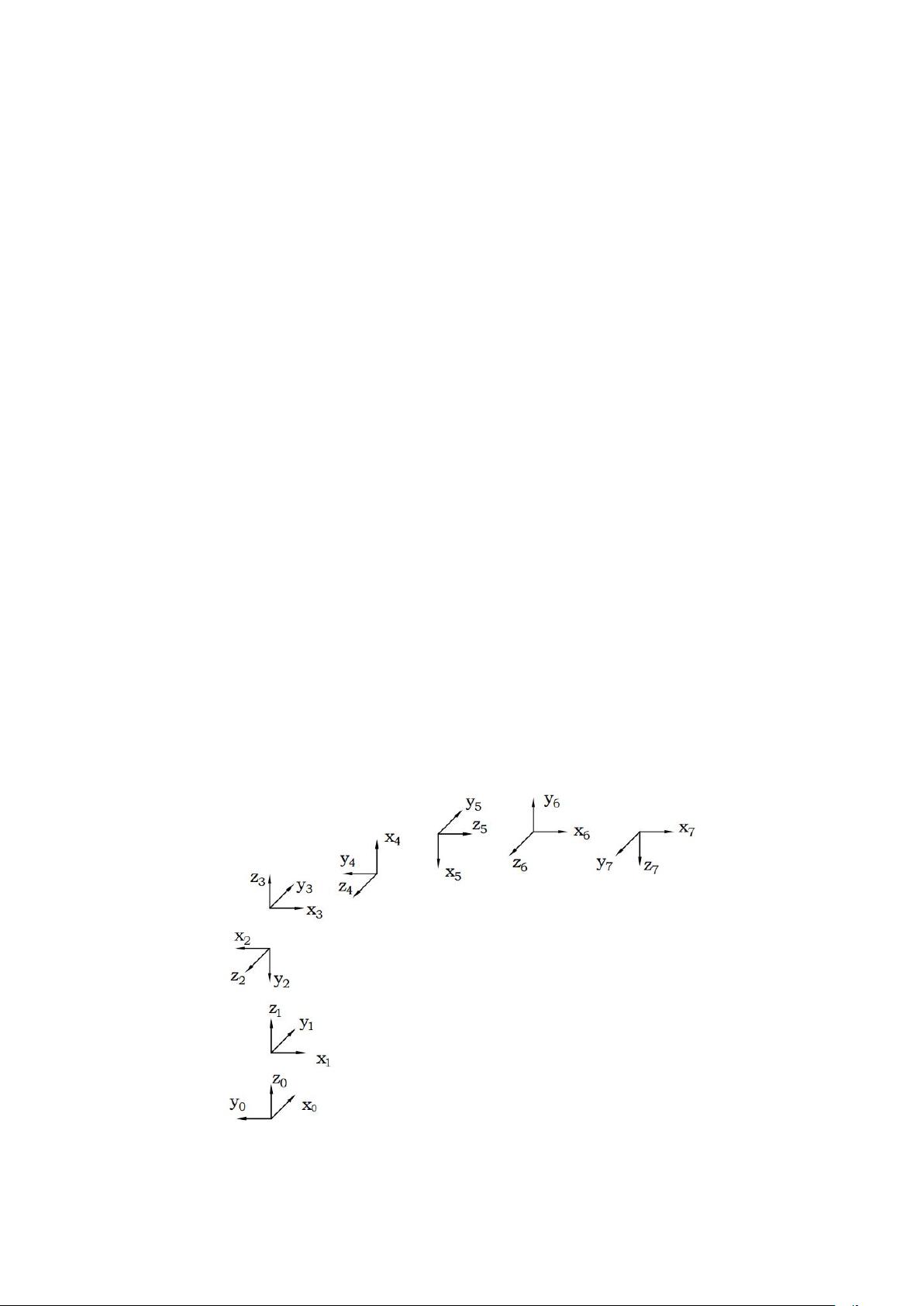
采用改进的 D-H 法建立 Xarm 机械臂连杆坐标系,如图 2-2 所示。相邻连杆
之间的转换矩阵通过
、
、
以及
四个参数来表示,D-H 参数如表 2-1 所
示。
图 2-2 机械臂的改进 D-H 连杆坐标系
Figure 2-2 Improved D-H link coordinate system of manipulator
下载后可阅读完整内容,剩余8页未读,立即下载
2021-06-23 上传
2023-05-17 上传
2023-05-15 上传
2023-08-11 上传
2023-09-06 上传
2008-04-03 上传
2023-09-24 上传
2021-07-04 上传

anthony-36
- 粉丝: 2412
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- 开源通讯录备份系统项目,易于复刻与扩展
- 探索NX二次开发:UF_DRF_ask_id_symbol_geometry函数详解
- Vuex使用教程:详细资料包解析与实践
- 汉印A300蓝牙打印机安卓App开发教程与资源
- kkFileView 4.4.0-beta版:Windows下的解压缩文件预览器
- ChatGPT对战Bard:一场AI的深度测评与比较
- 稳定版MySQL连接Java的驱动包MySQL Connector/J 5.1.38发布
- Zabbix监控系统离线安装包下载指南
- JavaScript Promise代码解析与应用
- 基于JAVA和SQL的离散数学题库管理系统开发与应用
- 竞赛项目申报系统:SpringBoot与Vue.js结合毕业设计
- JAVA+SQL打造离散数学题库管理系统:源代码与文档全览
- C#代码实现装箱与转换的详细解析
- 利用ChatGPT深入了解行业的快速方法论
- C语言链表操作实战解析与代码示例
- 大学生选修选课系统设计与实现:源码及数据库架构
