改进的Winograd傅立叶变换算法:3,5,7点统一架构
44 浏览量
更新于2024-08-27
1
收藏 1.3MB PDF 举报
"这篇研究论文提出了一种改进的统一架构,应用于3点、5点和7点的Winograd傅立叶变换算法(WFTA)。通过定义输入和输出的映射规则并利用矩阵变换修改WFTA中的矩阵,该设计既减少了硬件资源消耗,将多路复用器数量从7个减少到3个,还简化了控制流程,通过特定规则实现数据输入和端口映射。关键词包括:WFTA、统一架构和简化控制流。"
本文介绍的是针对Winograd傅立叶变换算法的一种优化方法,特别是在3点、5点和7点的变换规模上。Winograd傅立叶变换算法(WFTA)是快速傅立叶变换(FFT)的一种变体,它在计算离散傅立叶变换(DFT)时提供了一种更有效的方法。在现代无线通信系统中,如正交频分复用(OFDM)技术,DFT是核心组成部分,而FFT通常用于执行DFT。
傅立叶变换在信号处理和通信领域有着广泛的应用,它可以将信号从时域转换到频域,帮助分析信号的频率成分。然而,传统的FFT算法需要大量的乘法和加法操作,尤其是在大尺寸变换时,计算复杂度较高。相比之下,Winograd算法通过精心设计的矩阵运算,减少了乘法操作的数量,从而降低了计算量。
本论文提出的改进统一架构旨在进一步优化WFTA,通过修改算法中的矩阵,实现了硬件资源的节省。通过减少多路复用器的数量,降低了硬件实现的复杂性,这在资源有限的嵌入式系统或集成电路设计中尤其重要。同时,通过制定数据输入和端口映射的规则,控制流程得以简化,这有助于提高系统的运行效率和实时性能。
此外,简化控制流也是设计的关键优化之一。在数字信号处理系统中,控制逻辑的复杂性往往直接影响到系统的速度和可编程性。减少控制逻辑的复杂性可以使系统设计更易于理解和实现,同时也降低了错误发生的可能性。
这篇研究论文为实现高效、低资源消耗的Winograd傅立叶变换提供了新的设计思路,对于需要快速傅立叶变换但又受限于硬件资源的场合,如无线通信、图像处理和音频编码等领域,具有重要的实践意义。通过这样的优化,可以在不牺牲性能的前提下,提高系统的资源利用率和整体效能。
Improved Unified Architecture for 3, 5, and 7-point
Winograd Fourier Transform Algorithm
Qiang Zhang, Changyin Liu, Peng Zhang, Yuanzhi Chen, Jianhe Du
School of Information and Communication Engineering
Communication University of China
Beijing, China
qiangzhang@cuc.edu.cn, liuchy@cuc.edu.cn, zhangpeng@cuc.edu.cn, chenyuanzhi@cuc.edu.cn, dujianhe1@gmail.com
Abstract—This paper proposes an improved unified
architecture for 3, 5, and 7-point Winograd Fourier Transform
Algorithm (WFTA). We define the mapping rules of inputs and
outputs and modify the matrices in WFTA by matrix
transformation. This design not only reduces hardware resource
consumption by reducing multiplexers from 7 to 3, but also
simplifies the control flow by performing data input and ports
mapping through certain rules.
Keywords—WFTA; unified architecture; simplified control
flow
I. INTRODUCTION
Orthogonal Frequency Division Multiplexing (OFDM)
technology, which has strong immunity to frequency selective
fading, is widely used in modern wireless communication
systems. One of its core technologies is the DFT. In general,
FFT is used to reduce the complexity of the DFT.
FFT can be divided into two categories: power-of-two and
non-power-of-two. For power-of-two FFTs, algorithm
simulation and hardware implementation are very mature.
Currently, some standards involve non-power-of-two FFTs.
E.g., 3G Long Term Evolution (LTE) involves 1536-point
DFT
[1]
, Chinese Digital Terrestrial/Television Multimedia
Broadcasting (DTMB) involves 3780-point DFT
[2]
, and Digital
Radio Mondiale (DRM) involves 228-point DFT
[3]
. Non-
power-of-two FFTs are mostly calculated using Cooley-Tukey
Algorithm and Prime Factor Algorithm (PFA) to decompose an
N-point DFT into smaller DFTs, which are calculated by the
Winograd Fourier Transform Algorithm (WFTA). E.g., for
DTMB, 3780-point is decomposed into 3, 4, 5, 7, and 9-point
[4,
5]
.
WFTA calculates small point DFTs through matrix
decomposition, which greatly reduces the number of
multiplications. References [4] and [5] need to use different
circuits to calculate different small point WFTAs, and the
architecture is not uniform. Reference [6] proposed a unified
architecture of 2, 3, 4, 5, and 7-point WFTA. It can calculate 2,
3, 4, 5, and 7-point WFTA in the same circuit, reducing
resource consumption. However, it is just a blunt combination
of 2, 3, 4, 5 and 7-point signal flow graph. The input data and
ports mapping have no regularity, which leads to complicated
timing control. We think that 2 and 4-point DFTs needs 4
adders to achieve, which takes less resources. So there are no 2
and 4-point in the improved unified architecture. When using
the architecture in reference [6] for 3, 5, and 7-point WFTA, 36
complex adders, 16 real multipliers and 7 multiplexers are
needed, which results in great circuit differences and complex
control flow.
Section II introduces N-point WFTA. The improved unified
architecture design of N-point WFTA is proposed in the section
III. The last section concludes the paper.
II. N-
POINT WFTA
N-point WFTA can be expressed as:
T T
01 -101 -1
== ,
X CBA
N
N
xxXxXX ΛΛ
( 1 )
where A is an M × N matrix related to the input (M ≥ N), C is
the N×M matrix associated with the output, B is an M×M
diagonal matrix about θ (θ = 2/N), and the diagonal element is
denoted as {B
0
= 1, B
1
, ..., B
M -1
}, where B
1
, …, B
M-1
are purely
real or purely imaginary.
For 3-point WFTA, M = 3, N = 3, and the Winograd
algorithm gives the following matrices
11 1 1 0 0 10 0
=01 1, =0cos 1 0 , =11-1 .
01-1 0 0 j
2/3
2/3sin 1 1 1
AB C
(2)
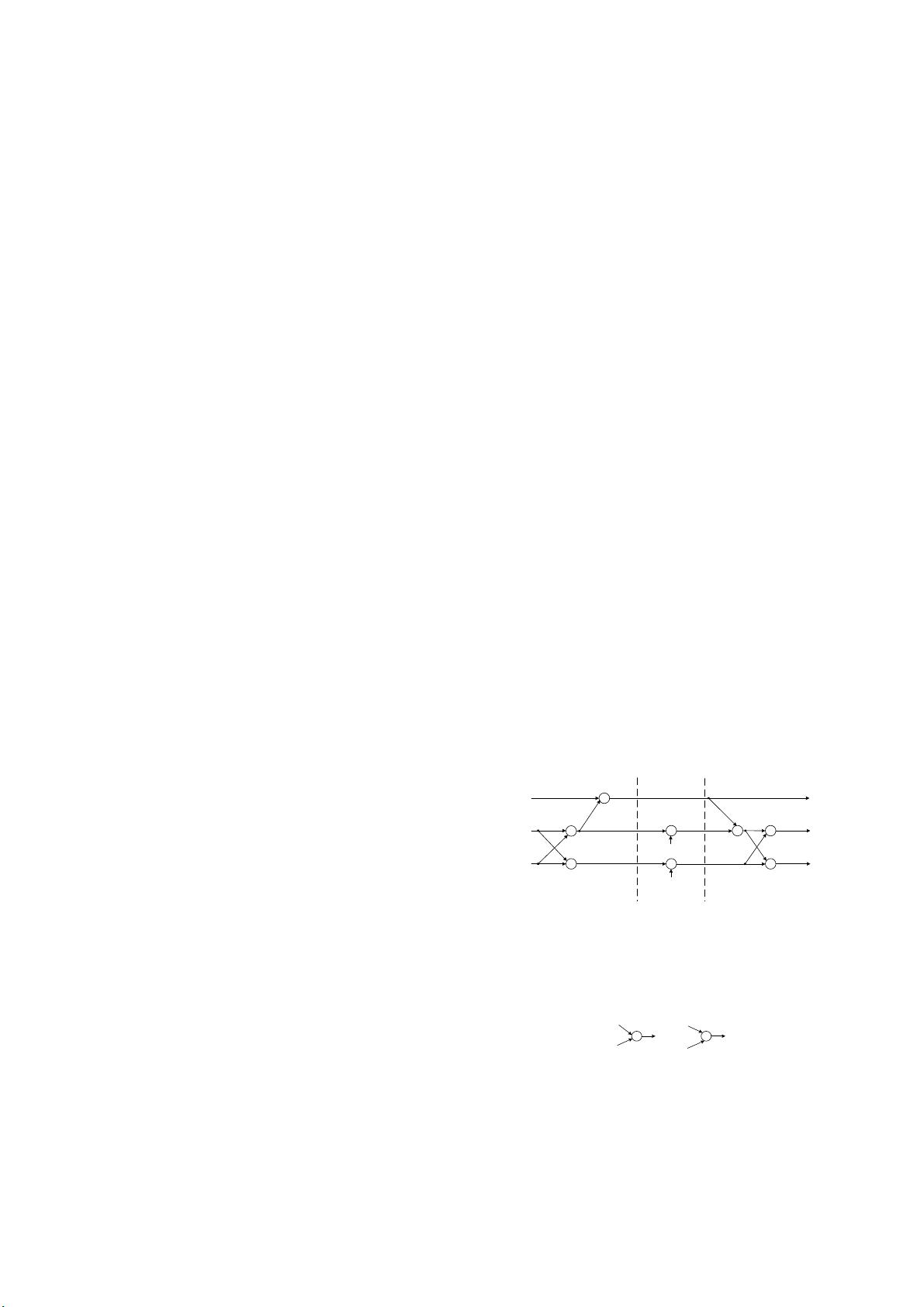
Bringing (2) into (1), we can get a 3-point WFTA signal
flow graph, as shown in Fig. 1. It can be seen that 3-point
WFTA involves 6 complex adders and 4 real multipliers.
x
0
+
x
1
-
-
x
2
B
2
B
1
× X
1
X
2
+
X
0
+
× +
a = A[x
0
x
1
x
2
]
T
b=Ba
[X
0
X
1
X
2
]
T
=Cb
Ⅰ Ⅱ Ⅲ
Fig. 1 3-point WFTA signal flow graph
The operation rules of the adder in Fig. 1 is explained in
Fig. 2. The input of the upper branch minus the input of the
lower branch is shown in Fig. 2(a). The addition is shown in
Fig. 2(b).
‐
S
0
=U
0
−D
0
(a)
+
S
1
=U
1
+D
1
(b)
U
0
D
0
S
0
U
1
D
1
S
1
Fig. 2 Symbol description
1545
978-1-7281-0513-0/19/$31.00 ©2019 IEEE
2019 IEEE 3rd Advanced Information Management,Communicates,Electronic and Automation Control Conference (IMCEC 2019)
下载后可阅读完整内容,剩余3页未读,立即下载
2020-11-13 上传
2009-12-02 上传
2020-11-13 上传
2020-11-13 上传
2011-01-06 上传
2010-12-03 上传
2019-10-28 上传
点击了解资源详情
2013-03-23 上传

weixin_38571603
- 粉丝: 3
- 资源: 925
 我的内容管理
展开
我的内容管理
展开







