PLC控制与伺服电机驱动的三自由度球坐标机器人设计
版权申诉
74 浏览量
更新于2024-06-23
收藏 1.37MB DOC 举报
"基于PLC控制和伺服电机驱动的三自由度球坐标机器人设计"
这篇文档是关于基于PLC控制和伺服电机驱动的三自由度球坐标机器人的设计研究。球坐标机器人是一种能够在三维空间中进行精确移动的机器人,通常由三个相互独立的旋转关节构成,分别对应三个自由度。这种设计旨在实现对特定区域内的对象进行灵活、精确的操作。
文档首先介绍了球坐标机器人,详细阐述了三自由度球坐标机器人设计的主要目标。这一部分涵盖了机器人的基本概念和课题的核心目标。设计过程中,考虑了机器人的工作范围、负载能力以及运动精度等因素。
接着,文档进入了机械部分的设计,包括主要参数的选择,如关节的角度范围、臂长等,这些参数直接影响机器人的工作性能。手爪设计是关键,因为它决定了机器人能否有效地抓住和搬运目标物体。机械手臂的设计则涉及结构强度和运动学分析,确保其在重载下仍能保持稳定和高效。机身设计则涵盖了支撑结构和整体布局,以保证机器人的稳定性与安全性。
在电气系统设计部分,文档讨论了PLC(可编程逻辑控制器)在机器人控制系统中的作用。PLC是工业自动化中的核心组件,负责接收传感器输入并控制执行器输出,实现机器人的精确动作。这里详细描述了PLC的输入输出地址分配和控制电路设计,这些都是确保机器人动作协调和高效运行的关键。此外,还提到了使用触摸屏系统作为示教装置,使得操作人员能够方便地编程和控制机器人。
最后的摘要部分概述了整个毕业设计的内容,强调了利用集成PLC的运动控制器和INVENTOR软件进行三维建模,以及AutoCAD Electrical进行电气控制电路设计,以此降低成本并提高系统的通用性。设计目标是开发一个适用于多种应用场景的球坐标机器人系统。
关键词:工业机器人、机器人、可编程逻辑控制器
这份文档详细探讨了基于PLC控制和伺服电机驱动的三自由度球坐标机器人设计,从机械结构到电气控制系统,全面展示了这类机器人的设计过程和技术要点。
第一章三自由度球坐标机器人设计方案分析
工业机器人在我国应用十分迅速,据统计,我国目前工业机器人装机数已经
仅次于日本,是世界第二大工业机器人应用国,预计在 2017 年成为世界第一工
业机器人应用大国。伴随着人工成本上涨,工业机器人价格下跌。我国工业机器
人的发展迎来了井喷时期,据统计,我国目前已经出现 30 个多机器人产业园,
涉足工业机器人制造的厂家有 1400 多家,未来 5 年,我国工业机器人应用将有
很大的进步。
1.1 球坐标工业机器人的介绍
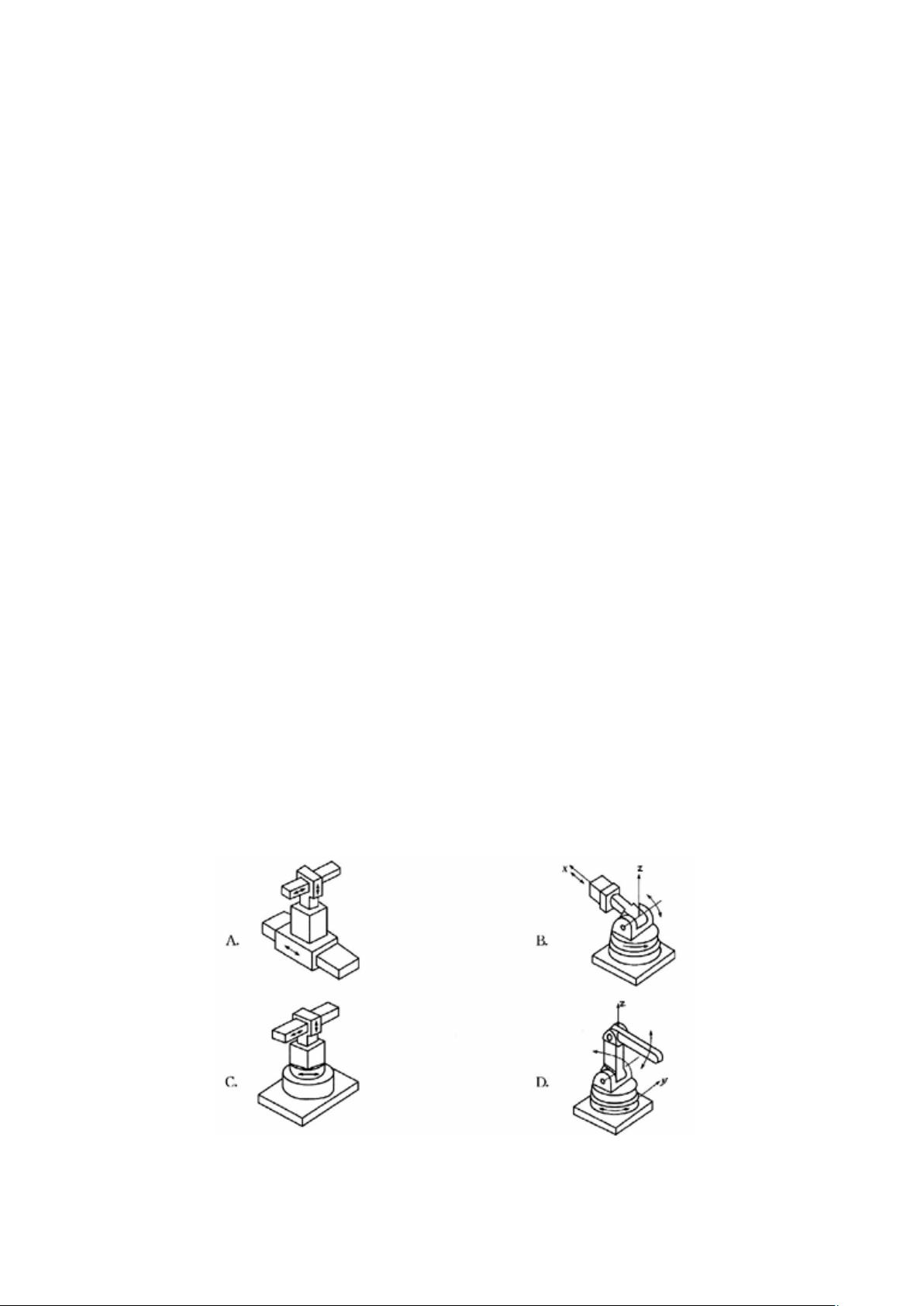
工业机器人按照坐标形式可以分成圆柱坐标,球坐标,直角坐标和关节坐
标,图 1 中,A 代表直角坐标机器人,B 代表球坐标机器人,C 代表柱坐标机器
人 ,D 代表关节机器人。
图1 几种常见工业机器人坐标形式
剩余21页未读,继续阅读
2023-07-02 上传
2023-07-02 上传
2023-07-12 上传
2021-09-16 上传
2021-09-18 上传
2023-02-27 上传

老帽爬新坡
- 粉丝: 92
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- IEEE 14总线系统Simulink模型开发指南与案例研究
- STLinkV2.J16.S4固件更新与应用指南
- Java并发处理的实用示例分析
- Linux下简化部署与日志查看的Shell脚本工具
- Maven增量编译技术详解及应用示例
- MyEclipse 2021.5.24a最新版本发布
- Indore探索前端代码库使用指南与开发环境搭建
- 电子技术基础数字部分PPT课件第六版康华光
- MySQL 8.0.25版本可视化安装包详细介绍
- 易语言实现主流搜索引擎快速集成
- 使用asyncio-sse包装器实现服务器事件推送简易指南
- Java高级开发工程师面试要点总结
- R语言项目ClearningData-Proj1的数据处理
- VFP成本费用计算系统源码及论文全面解析
- Qt5与C++打造书籍管理系统教程
- React 应用入门:开发、测试及生产部署教程
