28BYJ-48步进电机工作原理与控制
需积分: 9 101 浏览量
更新于2024-09-13
收藏 272KB DOC 举报
"28BYJ-48步进电机是一种常见的微型步进电机,常用于精确定位和调速的应用中。它具有四相八拍的工作模式,适用于5V至12V直流电压。通过控制输入脉冲的数量和频率,可以实现电机的精确角度移动和速度调控。电机的四个线圈分别由红色、橙色、黄色和粉色线连接,通常需要通过驱动芯片如ULN2003进行信号放大,以便与微控制器如单片机的P1口相连接。在C语言编程中,可以定义旋转相序数组来控制电机的正反转。"
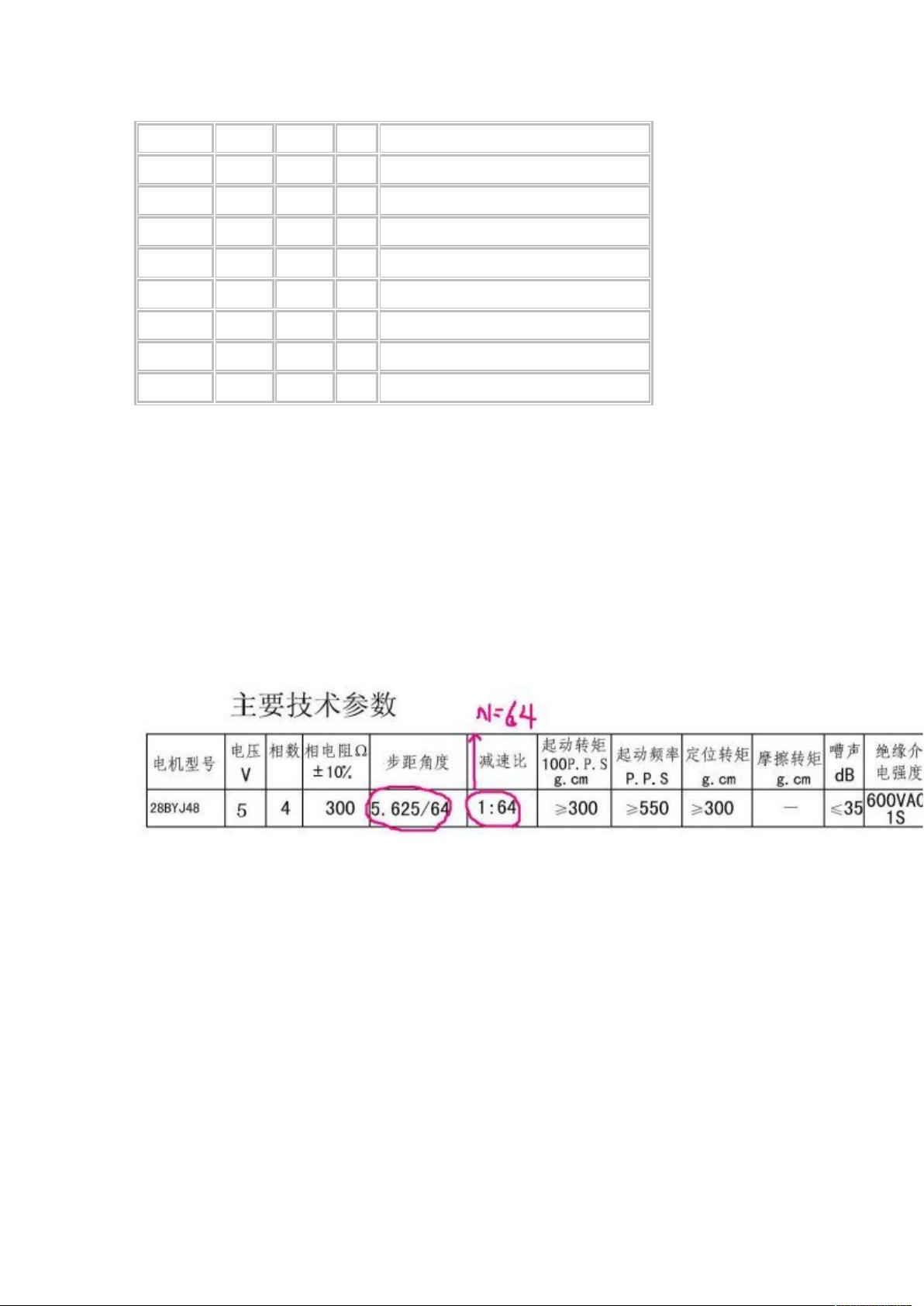
28BYJ-48步进电机是步进电机家族中的一员,其工作原理基于电磁感应。每个脉冲信号使电机按照固定的步进角(通常为5.625度)转动,因此,电机的精确位置和速度完全取决于脉冲信号的数量和频率。这种特性使得步进电机在自动化设备、机器人、3D打印机等需要高精度定位的领域中有广泛的应用。
电机的四相表示它有四个独立的线圈,每个线圈对应电机的一个磁极。八拍模式则意味着在电机转动一个完整步距角的过程中,每个线圈会经历两次通电状态的变化。这种通电模式能够提供更平滑的旋转,减少振动和噪音。
在实际应用中,28BYJ-48步进电机的电源线(红色)连接到5V-12V的电源,而其他四根控制线(橙色、黄色、粉色和蓝色)则需要通过驱动芯片如ULN2003来放大微控制器的输出信号,以驱动电机。这里以单片机AT89X52为例,控制线的连接方式是根据特定的通电顺序来设定的,例如,当P1口的输出值为0x08时,对应的是第一种通电状态。
为了控制电机的旋转方向,可以创建两个相序数组,一个代表顺时针旋转(CCW),另一个代表逆时针旋转(CW)。在给出的C语言代码中,`CCW[8]`和`CW[8]`就是这样的相序表,它们包含了电机每一步所需的P1口的输出值。通过改变这些数组中的值并将其发送给微控制器,可以控制电机的正反转以及旋转速度,实现灵活的运动控制。
28BYJ-48步进电机以其简单的结构、精确的定位能力和易于控制的特点,成为了许多DIY项目和工业应用的理想选择。理解其工作原理和控制方法,对于开发相关项目至关重要。
橙 黄 粉 蓝 十六制( 口)
顺序刚好相反
所以可以定义旋转相序
!"
#$%&'((((((()*++逆时钟旋
转相序表
!"#$%&'((((((()*
++正时钟旋转相序表
C 语言代码:
,-./!"0123
,-./!"0-.4-.53
,!"6.".5-7."!
,!"6."-.4.5-7."!-.4
!"
#$%&'((((((()*++逆时钟旋
转相序表
剩余10页未读,继续阅读
1697 浏览量
1583 浏览量
2128 浏览量
2025-01-20 上传
2025-01-20 上传
2025-01-20 上传
2025-01-20 上传
2025-01-20 上传

卡洛卡
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- 系统开发与运行基础:软件工程与需求分析
- Lua编程艺术:简洁与扩展
- Ant入门指南:Java项目构建与Eclipse集成
- ASP.NET数据验证控件电子书籍详解
- 分片连续算法实现高清晰图像缩放
- 构建基于AJAX的无刷新电子邮件系统
- 入门游戏设计:从 Saving Sera 到编程实践
- C++指针详解:数组、指针数组与多维指针
- WebSphere Portal 6.0与DB2 8.2.5安装与配置指南
- 深入解析J2EE的13大核心技术
- HP SIM 5.2安装与配置指南:Windows版详细教程
- ASP入门教程:动态网站设计揭秘
- C/C++面试笔试深度解析:从基础到高级
- JSP2.0技术入门指南:Java Servlet与JSF基础
- 数据库中的利器:存储过程详解与优势
- ATM与ADSL技术详解:电信网络基础
