EtherCAT同步轴数据结构详解
需积分: 2 81 浏览量
更新于2024-08-03
2
收藏 555KB PDF 举报
"codesys2-402轴结构体描述了EtherCAT周期同步轴的数据结构,包含多个变量来监控和控制轴的状态、通信、错误处理等。"
在工业自动化领域,EtherCAT(Ethernet for Control Automation Technology)是一种实时工业以太网协议,常用于高速设备间的通信。Codesys2-402轴结构体是基于 EtherCAT 协议设计的,它定义了用于同步轴控制的数据结构。这个结构体中的各个变量提供了轴的各种状态信息和控制选项,有助于实现精确的运动控制。
1. **wAxisStructID**: 这是一个WORD类型的变量,用于标识轴结构的类型,其默认值为16#FE12。此变量通常用于内部一致性检查,确保操作的是正确的结构。
2. **nAxisState**: 使用SMC_AXIS_STATE枚举类型,表示轴的PLCopen状态机状态。状态包括:power_off(断电)、errorstop(故障停止)、stopping(停止中)、standstill(静止)、discrete_motion(离散运动)、continuous_motion(连续运动)、synchronized_motion(同步运动)和homing(回零)。这些状态反映了轴在不同操作阶段的情况。
3. **bRegulatorOn**: 是一个BOOL类型的变量,用于控制轴的调节器是否开启,其默认值为FALSE。当设置为TRUE时,表示调节器已开启,轴可以进行运动控制。
4. **bDriveStart**: 又是一个BOOL变量,用于启动或禁用快速急停功能,初始值为FALSE。设置为TRUE时,轴将允许快速急停。
5. **bCommunication**: 表示通讯状态,TRUE表示通讯正常,FALSE则可能表示通讯异常。
6. **wCommunicationState**: 这是表示通讯状态的WORD变量,默认值16#FFFF,可以反映出轴与控制器之间的通讯状况。
7. **uiDriveInterfaceError**: UINT类型变量,存储驱动接口错误ID,当发生错误时,该变量会被赋予特定值。
8. **bRegulatorRealState** 和 **bDriveStartRealState**: 分别表示调节器和快速急停的实际状态,TRUE代表已开启,FALSE代表关闭。
9. **eBrakeControl**: 使用SMC3_BrakeSetState枚举,定义刹车控制模式,如SMC_BRAKE_AUTO,用于控制轴的制动系统。
10. **bBrakeClosedRealState**: 表示刹车实际关闭状态,对于安全操作至关重要。
11. **wDriveId**: 自动递增地址,用于区分不同的驱动器。
12. **iOwner** 和 **iNoOwner**: INT类型的变量,可能用于标识轴的所有者或者无所有者状态。
13. **fCycleTimeSpent** 和 **fTaskCycle**: 分别表示周期时间和任务的循环时间,以秒为单位,对实时性能监控和优化非常重要。
14. **bError**: 错误标志,当轴发生错误时,该变量设为TRUE。
15. **dwErrorID**: DWORD类型,存储轴错误的ID,用于识别具体错误类型。
16. **bErrorAckn**: 错误确认标志,用于标记错误已被处理。
17. **bOldError**: 保存上一周期结束时的错误状态,有助于追踪错误变化。
18. **fbeFBError**: 这是一个数组,包含了最多g_SMC_NUMBER_FB_ERRORS个错误反馈,提供了详细的错误信息。
codesys2-402轴结构体通过这些变量为 EtherCAT 系统提供了一个全面的轴状态监控和控制框架,使得开发者能够精细地管理和响应轴的运行情况,确保了自动化系统的高效和安全。
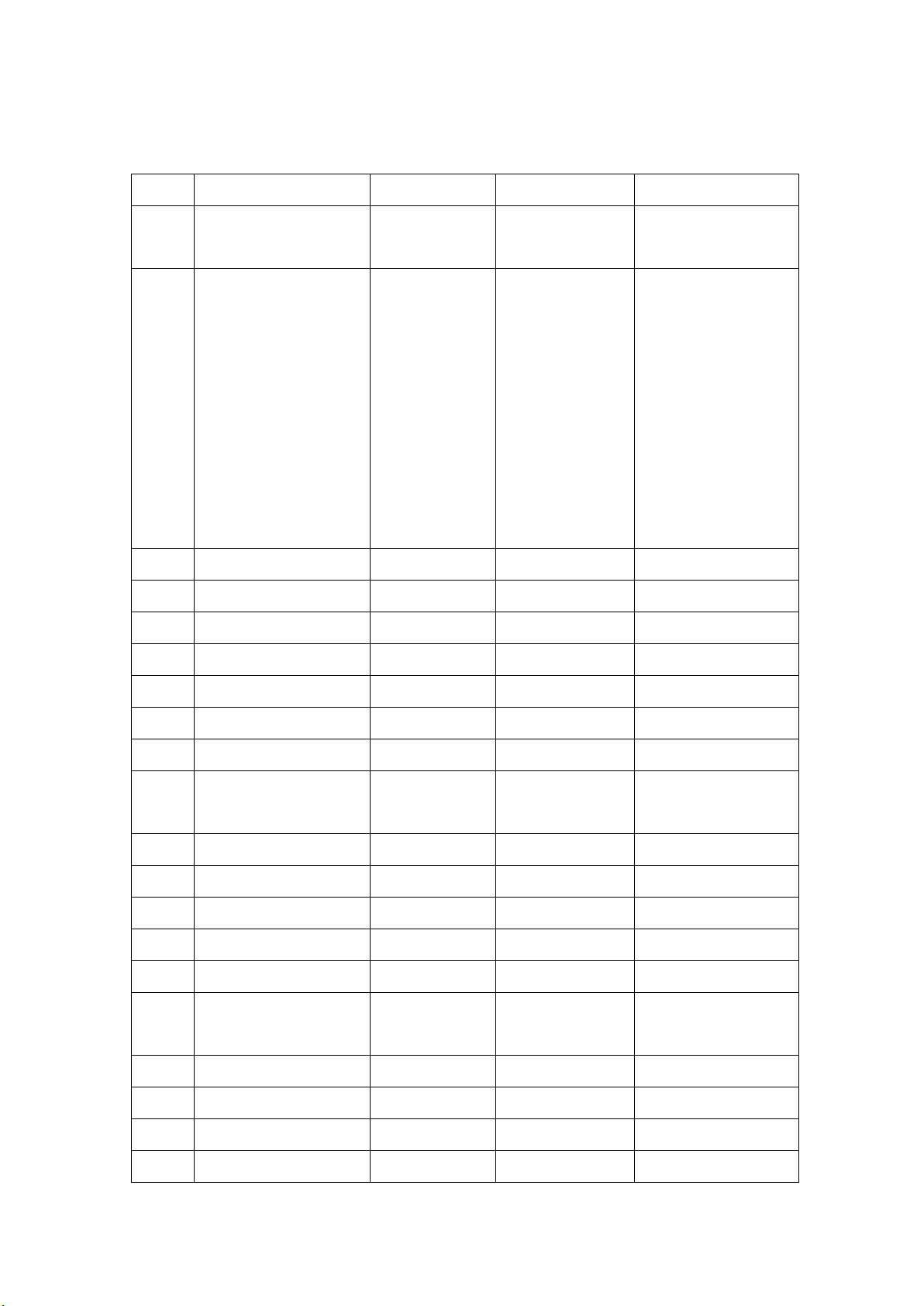
EtherCAT 周期同步轴数据结构
序号
名称
类型
默认值
注释
-
wAxisStructID
WORD
16#FE12
3S用于检查结构类型的
内部变量。
1000
nAxisState
SMC_AXIS_STATE
(INT)
standstill
轴PLCopen状态机:
0: power_off
1: errorstop
2: stopping
3: standstill
4: discrete_motion
5: continuous_motion
6:synchronized_motion
7: homing
1010
bRegulatorOn
BOOL
FALSE
(power) on/off
1011
bDriveStart
BOOL
FALSE
启用/禁用 快速急停
1012
bCommunication
BOOL
FALSE
TRUE:通讯正常
1013
wCommunicationState
WORD
16#FFFF
通讯状态
1014
uiDriveInterfaceError
UINT
0
驱动接口错误ID
1015
bRegulatorRealState
BOOL
FALSE
(power) on/off的状态
1016
bDriveStartRealState
BOOL
FALSE
快速急停的状态
1017
eBrakeControl
SMC3_BrakeSetSt
ate
SMC_BRAKE_AUTO
刹车控制
1018
bBrakeClosedRealState
BOOL
FALSE
刹车关闭状态
1021
wDriveId
WORD
driver
自动递增地址
1022
iOwner
INT
0
1023
iNoOwner
INT
0
1024
fCycleTimeSpent
LREAL
0
1025
fTaskCycle
LREAL
driver
任务的循环时间,单位:
秒
1030
bError
BOOL
FALSE
轴错误标志
1031
dwErrorID
DWORD
0
轴错误ID标志
1032
bErrorAckn
BOOL
FALSE
轴错误确认标志
1033
bOldError
BOOL
FALSE
上个周期结束时候
下载后可阅读完整内容,剩余6页未读,立即下载
2023-06-27 上传
2023-09-15 上传
2021-04-29 上传
2020-06-06 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情

lhy131456
- 粉丝: 2
- 资源: 17
 我的内容管理
展开
我的内容管理
展开







最新资源
- ES管理利器:ES Head工具详解
- Layui前端UI框架压缩包:轻量级的Web界面构建利器
- WPF 字体布局问题解决方法与应用案例
- 响应式网页布局教程:CSS实现全平台适配
- Windows平台Elasticsearch 8.10.2版发布
- ICEY开源小程序:定时显示极限值提醒
- MATLAB条形图绘制指南:从入门到进阶技巧全解析
- WPF实现任务管理器进程分组逻辑教程解析
- C#编程实现显卡硬件信息的获取方法
- 前端世界核心-HTML+CSS+JS团队服务网页模板开发
- 精选SQL面试题大汇总
- Nacos Server 1.2.1在Linux系统的安装包介绍
- 易语言MySQL支持库3.0#0版全新升级与使用指南
- 快乐足球响应式网页模板:前端开发全技能秘籍
- OpenEuler4.19内核发布:国产操作系统的里程碑
- Boyue Zheng的LeetCode Python解答集
