深度学习驱动的2018 SLAM暑期课程:立体匹配与三维重建详解
需积分: 20 192 浏览量
更新于2024-07-18
1
收藏 4.77MB PDF 举报
深度恢复与三维重建是2018年浙江大学第一届SLAM研讨会中的核心议题,由章国锋教授主讲,关注于计算机视觉中的关键技术。课程内容涵盖以下几个方面:
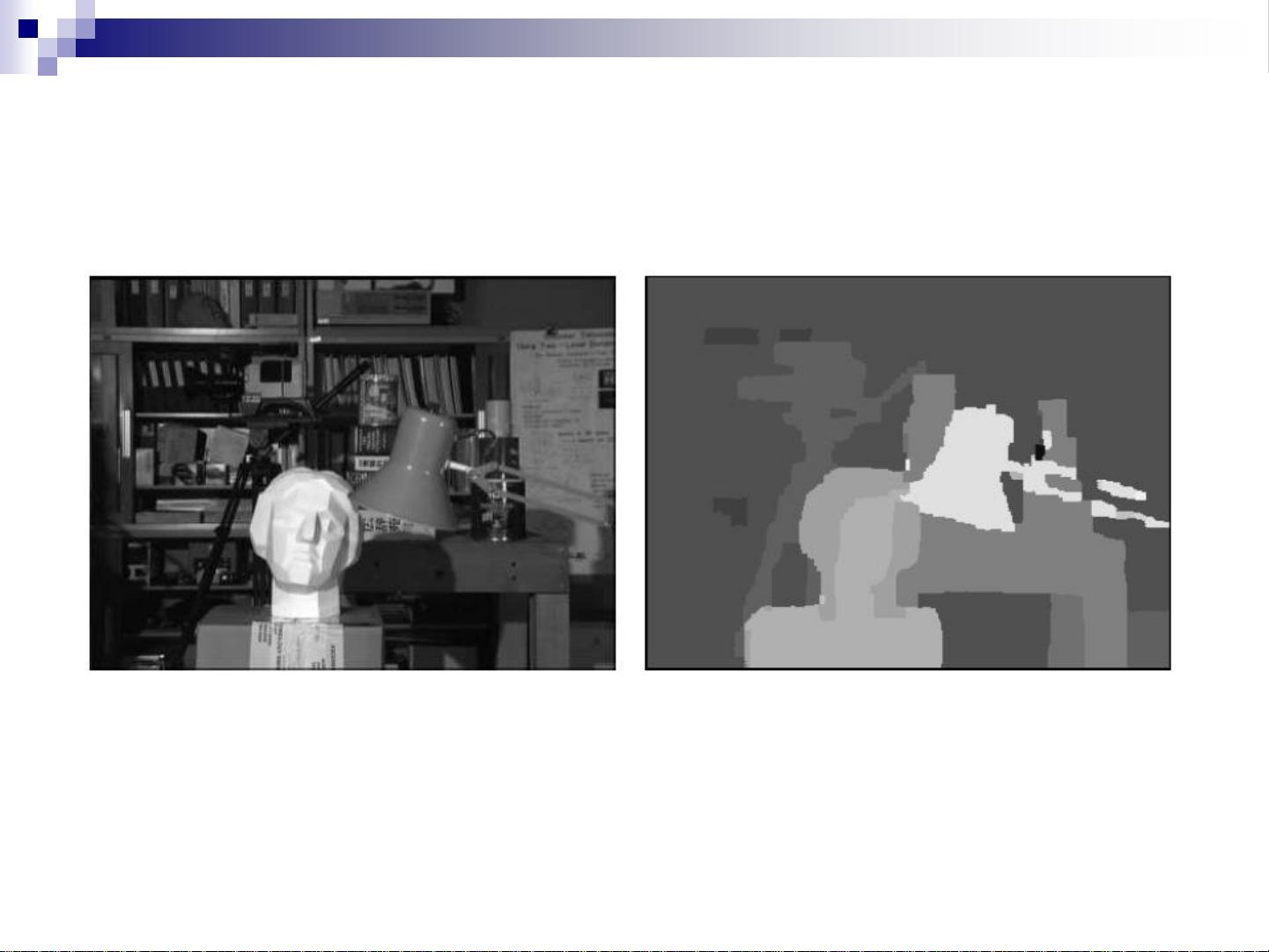
1. **双视图与多视图立体匹配**:
- 立体视觉是一种利用两幅或更多图像对来获取场景深度信息的方法。
- 双视图立体匹配是基础,通过比较同一场景在不同视角下的像素差异(如 disparity),推断出物体的三维坐标。
- 多视图立体匹配则扩展到了多个视角,增加了场景重建的精度。
2. **基于深度学习的深度估计**:
- 随着深度学习的发展,深度估计技术也取得了显著进步,通过神经网络模型能够自动学习和预测深度信息,提高匹配的准确性。
3. **三维几何重建**:
- 在获得大量匹配点后,通过立体几何约束,可以进一步计算出物体的精确三维模型,如通过极线几何减少匹配的复杂度。
- 三维几何重建通常涉及运动参数的估计、深度图像的计算,以及可能的图像校正,以确保左右相机的配置满足标准。
4. **图像矫正**:
- 校正过程包括将左右视图调整到共享的平面上,如Seitz投影,以简化匹配过程并提升精度。
5. **像素匹配算法**:
- 包括单像素匹配,以及改进的基于窗口的匹配方法,如SSD、SAD、MAD和NCC,窗口大小的选择对匹配结果有直接影响。
- 自适应窗口大小可以帮助平衡细节保留和噪声抑制。
6. **立体匹配评测**:
- Scharstein和Szeliski的工作提供了一种评估密集两帧立体对应关系算法的标准,如《A Taxonomy and Evaluation of Dense Two-Frame Stereo Correspondence Algorithms》。
7. **全局优化方法**:
- 为了提高重建的质量,立体匹配往往需要全局优化,通过定义能量函数,包括数据项(匹配精度)、平滑项(图像连续性)来进行优化。
这些知识点展示了深度恢复与三维重建在计算机视觉中的重要应用,特别是SLAM(Simultaneous Localization And Mapping)领域,通过高效而准确的匹配和重建技术,为机器人导航、增强现实等实际应用提供了基础支持。
Stereo Matching with Belief
Propagation
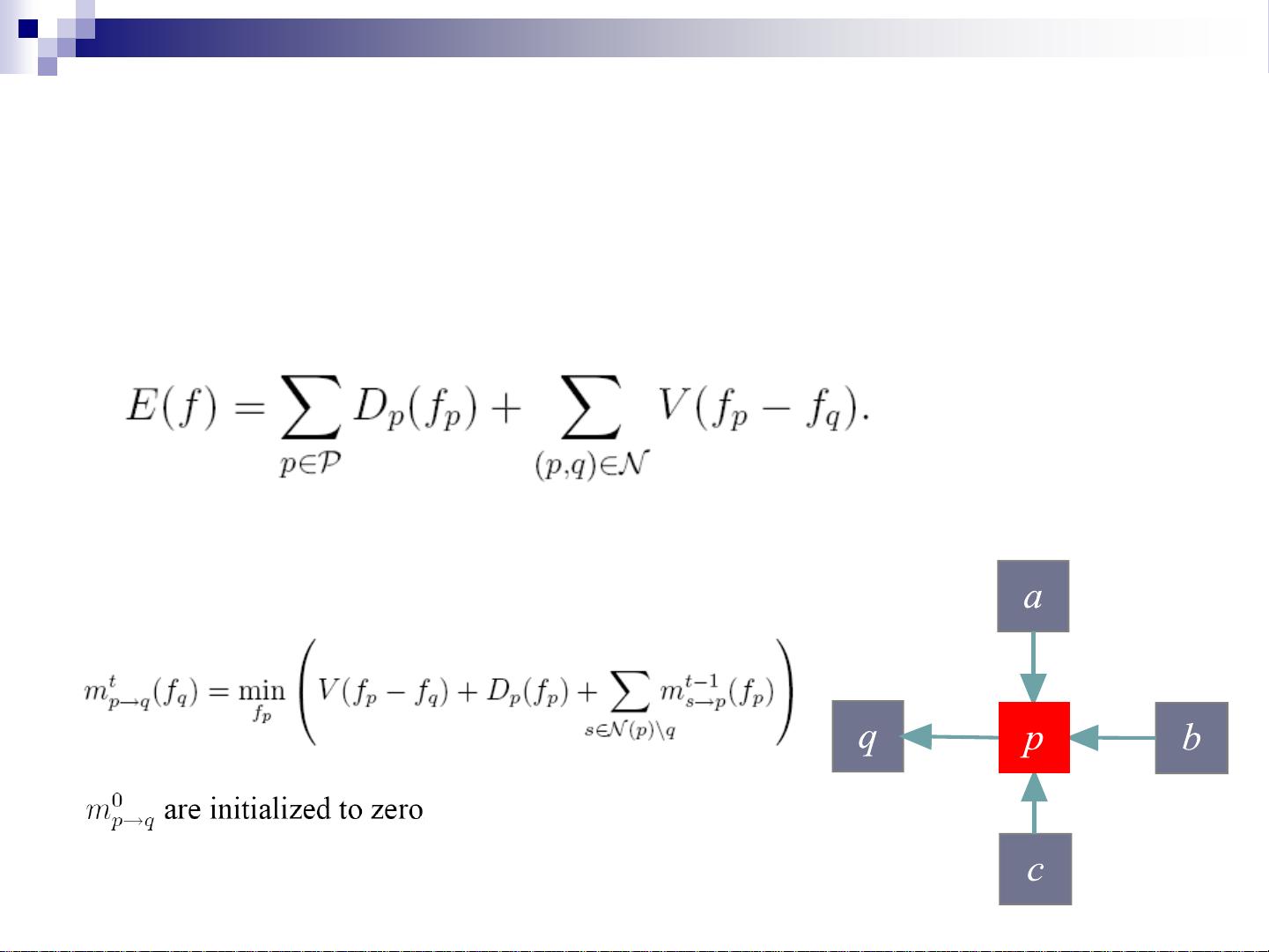
Energy Function
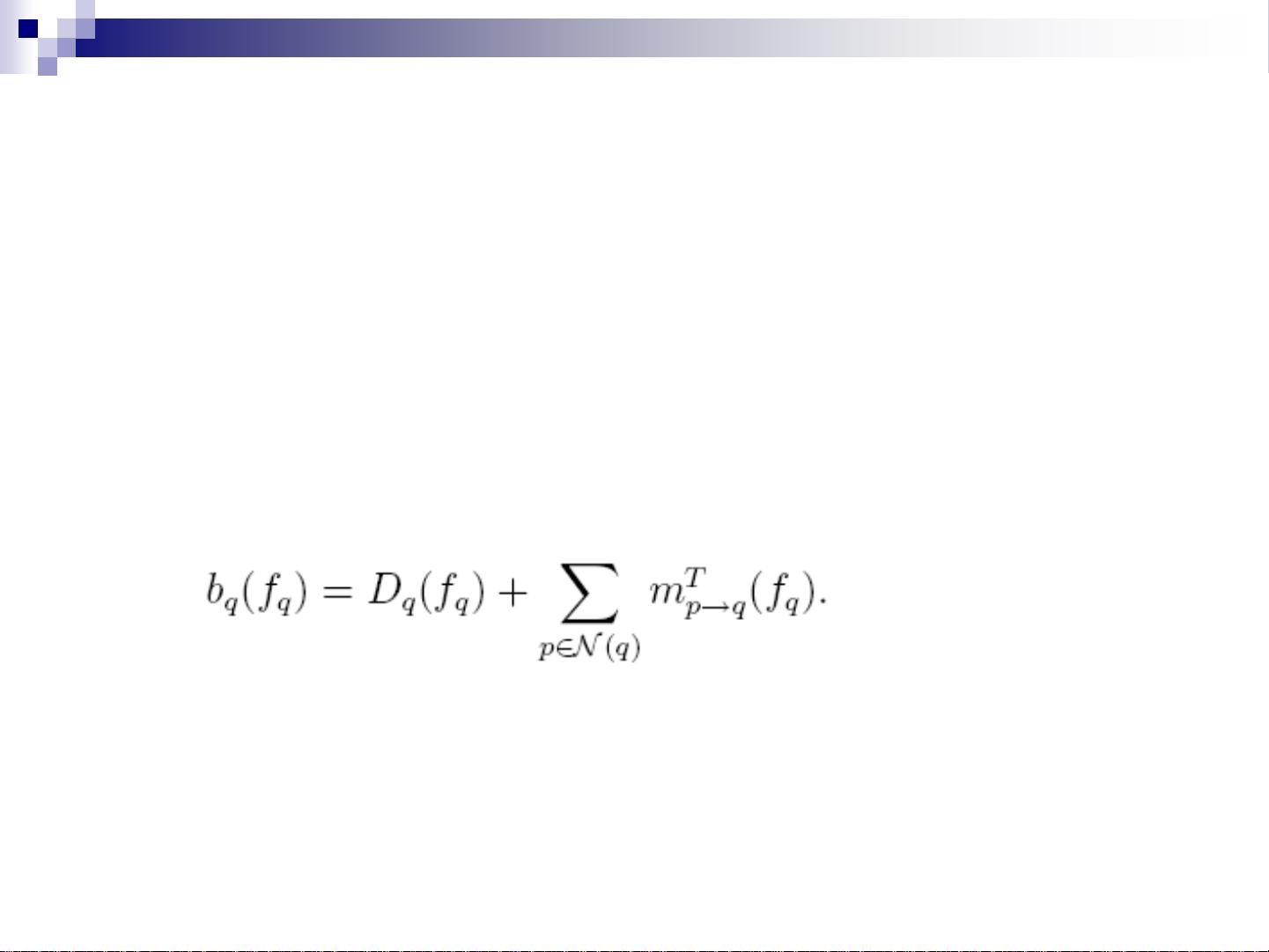
Loopy Belief Propagation: Max-Product
Each iteration
)(
q
t
qp
fm
)(
1
p
t
pa
fm
)(
1
p
t
pb
fm
)(
1
p
t
pc
fm

剩余94页未读,继续阅读
2020-09-18 上传
2022-07-13 上传
2022-07-15 上传
2024-04-12 上传
2019-03-21 上传
2024-02-18 上传

小玄玄
- 粉丝: 14
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- JDK 17 Linux版本压缩包解压与安装指南
- C++/Qt飞行模拟器教员控制台系统源码发布
- TensorFlow深度学习实践:CNN在MNIST数据集上的应用
- 鸿蒙驱动HCIA资料整理-培训教材与开发者指南
- 凯撒Java版SaaS OA协同办公软件v2.0特性解析
- AutoCAD二次开发中文指南下载 - C#编程深入解析
- C语言冒泡排序算法实现详解
- Pointofix截屏:轻松实现高效截图体验
- Matlab实现SVM数据分类与预测教程
- 基于JSP+SQL的网站流量统计管理系统设计与实现
- C语言实现删除字符中重复项的方法与技巧
- e-sqlcipher.dll动态链接库的作用与应用
- 浙江工业大学自考网站开发与继续教育官网模板设计
- STM32 103C8T6 OLED 显示程序实现指南
- 高效压缩技术:删除重复字符压缩包
- JSP+SQL智能交通管理系统:违章处理与交通效率提升
