无线网络多车系统中非线性动力学与执行器故障下的领导者-跟随者共识
199 浏览量
更新于2024-08-31
收藏 2.29MB PDF 举报
本文探讨了多车辆无线网络化不确定系统中的领导-跟随共识问题,该系统受到非线性动力学和执行器故障的影响。作者Bohui Wang、Jingcheng Wang、Bin Zhang(IEEE高级会员)、Weisheng Chen以及Zhengqiang Zhang针对这种复杂环境提出了一个基于相邻车辆相对状态的分布式不连续通信协议。他们提出了一种新颖的故障模型,该模型能够处理多车辆无线网络系统中不同执行器故障情况下的容错共识。
在研究中,作者重点分析了非线性动力学系统和执行器故障如何影响车辆间的协调与同步。他们利用Lyapunov稳定性理论,对系统性能进行了深入的数学建模和分析。关键发现是,如果满足了滞回时间和间歇通信速率等条件,即使在系统频繁但不持续地连接的状态下,领导者和跟随者之间的共识仍然可以在存在非线性动力学和执行器故障的情况下达成。
论文的核心贡献在于设计了一种有效的控制策略,使得多车辆能够在面对不确定性和故障时维持稳定的协同工作模式。通过采用分布式通信方式,避免了集中式控制的缺点,提高了系统的鲁棒性和适应性。同时,文中还可能涉及了对于系统稳定性的定量评估方法,以及对不同故障模式下的故障检测和隔离机制。
此外,文章可能还讨论了实验验证或仿真结果,展示了所提协议在实际应用中的可行性和有效性。通过这些研究,本文为无线网络化多车辆系统的设计和控制提供了一种新的理论指导,有助于提升未来智能交通系统、无人驾驶车辆等领域中的协作性能和安全性。这项工作对于理解和解决复杂动态环境中大规模自治系统之间的协调问题具有重要意义。
494 IEEE TRANSACTIONS ON AUTOMATION SCIENCE AND ENGINEERING, VOL. 15, NO. 2, APRIL 2018
information flow topology is network formation. The dynamic
of the ith vehicle is given by
˙x
i
(t) = (A + A
i
)x
i
(t) + Cf(x
i
(t), t) + Bu
i
(t) (1)
where x
i
(t) ∈ R
n
is the state of the ith vehicle, u
i
(t) ∈ R
m
is
a consensus protocol to be designed, m, n ∈ N, f (x
i
(t), t) =
( f
1
(x
i
(t), t),..., f
n
(x
i
(t), t))
T
, i = 1,...,N, f (·) : R
n
×
[0, +∞) → R
m
is a continuously differentiable vector-valued
function representing the intrinsic nonlinear dynamics of the
ith agent, A and B are two constant real matrices, and A
i
is
a time-varying state-dependent uncertainty of vehicle i.
The following assumptions are introduced in this paper.
Assumption 1: The system matrix pair (A, B) is
stabilizable.
Assumption 2: For any i ∈{1,...,N}, there exist a positive
constant ρ and a matrix E
i
: R
+
→ R
n×n
,sothat
A
i
(t) = ρ AE
i
(t), E
i
(t)
E
i
(t) ≤ I
n
. (2)
Assumption 3: There exists a matrix , such that
| f (y, t) − f (x, t)|≤|y − z|, ∀y, z ∈ R
n
, t ≥ 0. (3)
Remark 1: Note that Assumption 2 is a condition of the
time-varying state-dependent uncertainty of the ith vehicle, in
which the positive constant ρ is a bounded constraint constant.
The similar assumption can be found in [50]. In addition,
Assumption 3 is a Lipschitz condition, in which the matrix
is Lipschitz constraint constant. The similar assumption can
be found in [19].
This paper addresses the leader–follower consensus prob-
lem for multivehicle wirelessly networked uncertain systems
with discontinuous communication due to packet loss or
temporary actuator failure [51]–[53]. Under such scenarios,
the leader–follower consensus protocol is designed by a dis-
tributed intermittent communication strategy. To analyze the
effects of actuator faults, actuator behaviors of the agents
are divided into normal, loss of effectiveness, and miss and
outage communication. For convergence analysis, it is further
assumed that these three types of actuator behaviors exist in
an execution cycle. Moreover, we assume that the vehicles
have the same actuator fault behavior, i.e., the actuators of
all vehicles occur, the component degradation or outage.
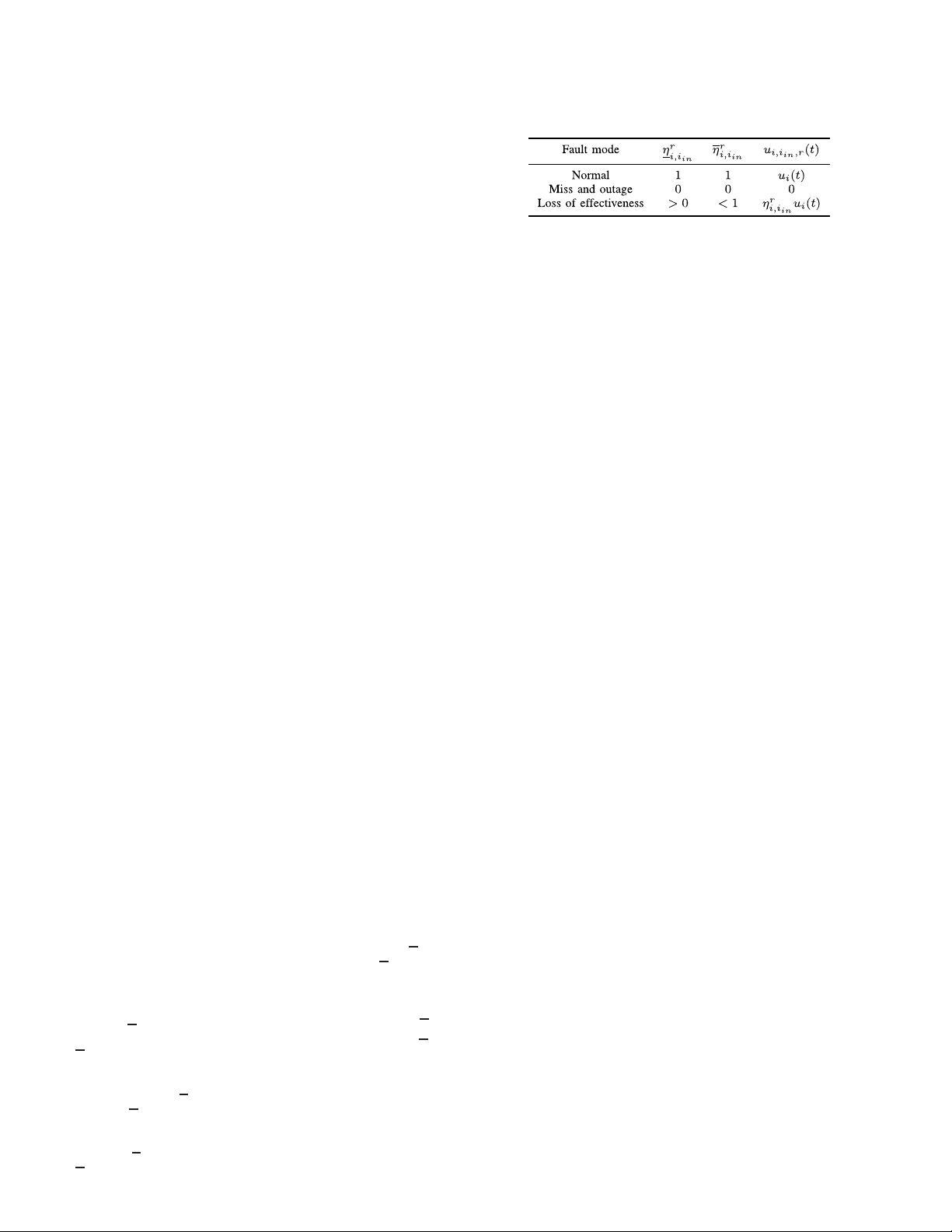
Let F be the actuator fault mode, and u
F
i,i
in
,r
be the input
signal of the i
in
th actuator with the rth fault mode. Then, the
actuator fault mode of the i agent is given by
u
F
i,i
in
,r
(t) = η
r
i,i
in
u
i
(t) (4)
where i
in
= 1,...,m, r = 1,...,L, η
r
i,i
in
∈[η
r
i
in
, η
r
i
in
] is a
bounded constant, index r denotes the rth fault mode, L is the
number of total fault modes, and m is the number of actuators
of the ith vehicle. In real applications, we have 0 ≤ η
r
i,i
in
≤
η
r
i,i
in
≤ η
r
i,i
in
. Note that the normal behavior implies η
r
i,i
in
=
η
r
i,i
in
= 1, which means no fault in the i
in
th actuator of the
i-vehicle and u
F
i,i
in
,r
(t) = u
i
(t); the miss and outage behavior
implies η
r
i,i
in
= η
r
i,i
in
= 0, which means that the i
in
th actuator
of the i-vehicle is miss and outage in the rth fault mode and
u
F
i,i
in
,r
(t) = 0; the loss of effectiveness behavior implies 0 <
η
r
i,i
in
< η
r
i,i
in
< 1, which means the partial degradation of
TABLE I
A
CTUATOR FAULT MODE
the i
in
th actuator of the i-vehicle with the rth fault mode and
u
F
i,i
in
,r
(t) = η
r
i,i
in
u
i
(t). Table I summarizes the fault mode for
multivehicle wirelessly networked systems.
Denote u
F
i,r
(t) = (u
F
i,1
in
,r
(t),...,u
F
i,m
in
,r
(t))
T
= η
r
i
u
i
(t),
where η
r
i
= diag{η
r
1
in
,...,η
r
m
in
}, r = 1,...,L. It can be writ-
ten in a concise form of ∇η
r
={η
r
|η
r
= diag{η
r
1
,...,η
r
N
}}.
Then, the uniform actuator fault model is established for all
possible fault modes L
u
F
(t) = η
r
u(t) (5)
where η
r
∈∇η
r
, r = 1,...,L.
The dynamics of system (1) with actuator fault
model (5) can be described by
˙x
i
(t) = (A + A
i
)x
i
(t) + Cf(x
i
(t), t) + Bη
r
i
u
i
(t). (6)
In this paper, we assume that the leader vehicle plays the
role of a command generator and provides reference states that
have to be approached by the followers. That is, the leader
(indexed by 1) evolves without being affected by the follower
vehicles, i.e., u
1
(t) ≡ 0 in (6). The control objective here is to
design a distributed leader–follower consensus algorithm based
on the limited information of local neighbors, such that the
states of followers asymptotically track the reference states of
the leader vehicle, which is mathematically defined as follows.
Definition 2: The leader–follower consensus of (6) is
achieved if and only if the following condition holds for any
initial conditions:
lim
t→∞
x
i
(t) − x
1
(t)=0(7)
where x
1
(t) is the state of the leader vehicle.
Before moving on, we define a switching signal
σ(t) :
[0, +∞) →{1,...,s}, in which each
σ(t) is a possi-
ble directed topology that corresponds to a specific actu-
ator fault mode. Without loss of generality, let G
σ(t)
be
the topology of system (6) for t ≥ 0. Suppose that
there exists an infinite sequence of uniformly bounded
nonoverlapping time interval t ∈[
ˆ
t
k
,
ˆ
t
k+1
) with
ˆ
t
1
= 0,
ν
1
>
ˆ
t
k+1
−
ˆ
t
k
≥ ν
0
> 0. Furthermore, suppose that there
exists an infinite but bounded sequence of fault time intervals
[
¯
t
p
,
¯
t
p
+ ρ
p
) with
¯
t
1
> 0,
¯
t
p+1
>(
¯
t
p
+ ρ
p
) and ρ
p
> 0,
p ∈ N, indicating the actuator is loss of effectiveness in
t ∈∪
p∈N
[
¯
t
p
,
¯
t
p
+ρ
p
). Suppose that there exists an infinite but
bounded sequence of disconnected time intervals t ∈[
¯
t
q
,
¯
t
q
+
ρ
q
) with
¯
t
1
> 0,
¯
t
q+1
>
¯
t
q
+ρ
q
and ρ
q
> 0, q ∈ N, indicating
the actuator is miss and outage in t ∈∪
q∈N
[
¯
t
q
,
¯
t
q
+ ρ
q
).
Based on the above-mentioned statements, there exists an
infinite but bounded sequence of nonoverlapping time intervals
[t
k
, t
k+1
) with t
1
= 0, k ∈ N, such that there exist positive
剩余13页未读,继续阅读
2021-02-20 上传
2021-02-08 上传
2021-02-10 上传
2022-07-14 上传
2021-02-09 上传
2021-04-01 上传
2021-10-02 上传
2021-02-21 上传
2021-02-07 上传

weixin_38717169
- 粉丝: 4
- 资源: 947
 我的内容管理
展开
我的内容管理
展开







最新资源
- IEEE 14总线系统Simulink模型开发指南与案例研究
- STLinkV2.J16.S4固件更新与应用指南
- Java并发处理的实用示例分析
- Linux下简化部署与日志查看的Shell脚本工具
- Maven增量编译技术详解及应用示例
- MyEclipse 2021.5.24a最新版本发布
- Indore探索前端代码库使用指南与开发环境搭建
- 电子技术基础数字部分PPT课件第六版康华光
- MySQL 8.0.25版本可视化安装包详细介绍
- 易语言实现主流搜索引擎快速集成
- 使用asyncio-sse包装器实现服务器事件推送简易指南
- Java高级开发工程师面试要点总结
- R语言项目ClearningData-Proj1的数据处理
- VFP成本费用计算系统源码及论文全面解析
- Qt5与C++打造书籍管理系统教程
- React 应用入门:开发、测试及生产部署教程
