基于回转结构的语义SLAM研究与应用
需积分: 0 194 浏览量
更新于2024-06-30
收藏 5.01MB PDF 举报
"这篇硕士学位论文探讨了一种融合回转结构的语义SLAM(Simultaneous Localization and Mapping)方法,旨在提升智能机器人对环境的理解和交互能力。作者李丰在导师李健的指导下,研究了如何利用深度学习与传统图像分割算法结合来自动分割回转体(如圆柱、球体等)的外轮廓,并在此基础上构建了一个融合回转结构的视觉SLAM框架。"
在视觉SLAM领域,理解环境的几何特性和语义信息对于机器人导航和任务执行至关重要。传统的SLAM方法主要关注位置和地图的构建,但缺乏对环境物体的语义理解。该研究提出的新方法结合了深度学习和图像处理技术,通过训练Mask R-CNN网络来识别和分割回转体。这一步骤有助于准确地提取出具有回转对称性的物体,如建筑物的柱子或家具的圆形部分。
接下来,论文利用回转体在图像中的特殊几何约束,建立了一个比例模型,这允许系统更精确地估计这些物体的尺寸和位置。这一创新不仅增强了SLAM的定位精度,也为构建具有语义信息的地图提供了可能。
最后,李丰提出了一个融合回转结构的SLAM系统框架,其中包含回转体真实尺度与位姿的融合方法。这种方法能有效地将回转体的几何和语义信息整合到SLAM后端的闭环检测中,从而提高了系统的鲁棒性和准确性。通过这种方式构建的结构语义SLAM地图,机器人不仅能定位自身,还能理解周围环境的含义,为更复杂的交互和决策提供支持。
这篇论文为视觉SLAM领域带来了一种新的视角,即利用回转体的几何特性进行增强,实现了更高级别的环境理解,这对于自主导航和智能服务机器人的发展具有重要意义。

融合回转结构的语义 SLAM 方法研究
5
实例分割表示:首先用目标检测方法从图像中检测出感兴趣物体矩形区域,再用语
义分割方法对兴趣区域进行逐像素标记。Mask R-CNN
[66]
同时检测与高质量分割图像中的
实体。在 Faster R-CNN 的基础上增加了一个 Mask 分支,同时预测物体区域蒙板(在每
个矩形兴趣区域预测像素分割蒙板),其在 2018 COCO 数据集
[67]
挑战赛上,在实例分割、
人体关键点检测上取得了第一。Mask R-CNN 框架对于物体实例分割具有较好的一般性,
已用在分割显微镜下细胞核,机器人抓取、航空图像分割
[68]
等方面。
1.2.3 单张照片回转体建模
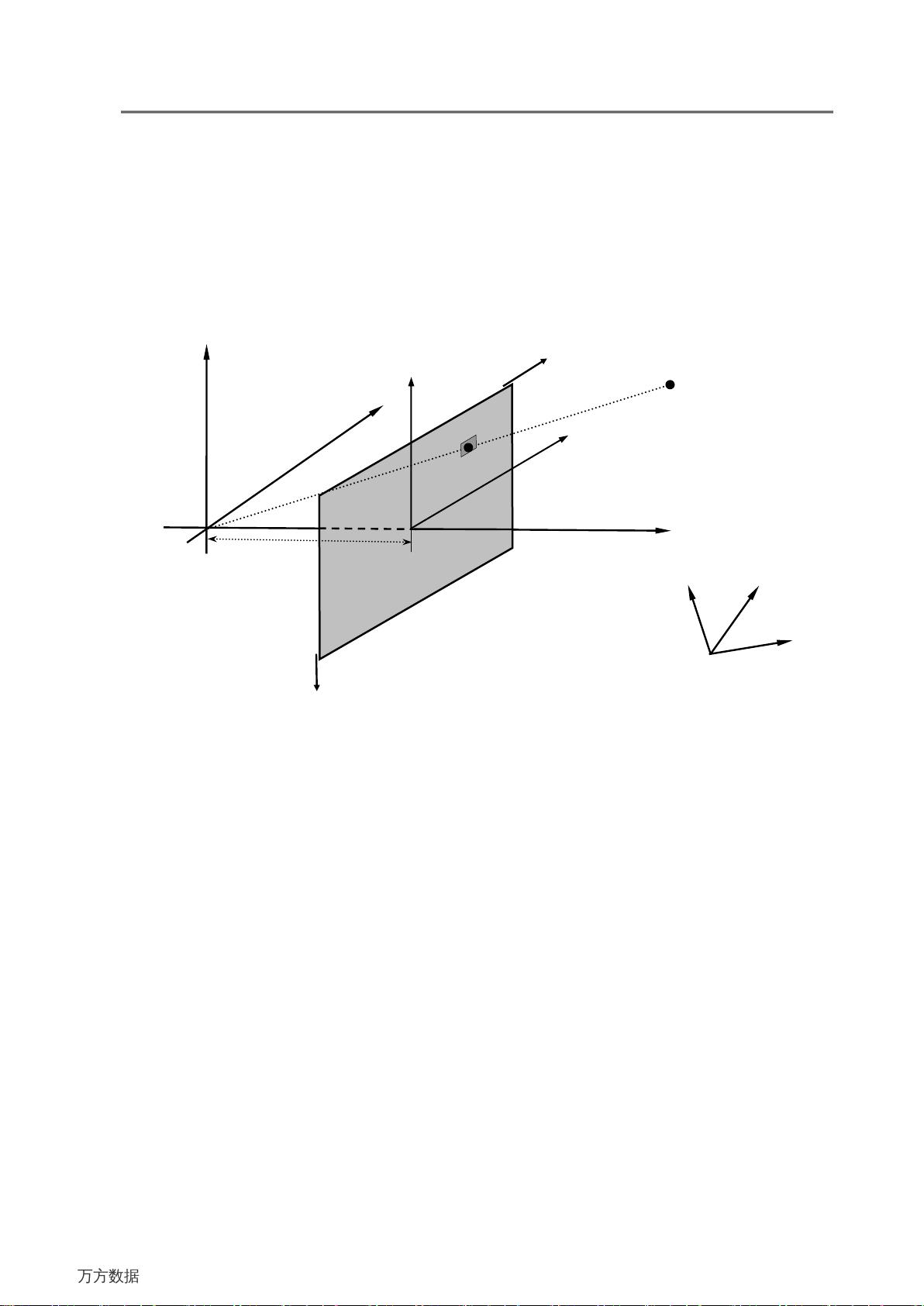
旋转曲面或回转体表示任意曲线绕一个固定旋转轴旋转一周形成的曲面。由于其对
称性,经相机成像后轮廓线及横截面之间存在着确定的几何关系,使得基于单张照片的
比例模型重建,基于两张照片下的实际尺度模型恢复与位置姿态估计成为可能。在对回
转体进行重建或根据单张回转体照片进行相机标定时,文献[69,70]利用成像后轮廓线
上点的切线同时正切于回转体横截面,文献[71–73]根据回转体横截面成像后为椭圆,且
横截面之间存在平行关系,文献[74]中同时使用了这两种约束。在已知回转体成像后轮
廓线的条件下,文献[72]对单张照片的回转体进行了相差一个比例尺度的模型构建,文
献[75]得到了矫正后的回转体图像。
利用轮廓线的单张照片回转体建模方法,通过恢复出回转物体旋转轴和生成曲线的
真实位置与尺度来实现。相比于基于特征匹配、深度相机等传统三维重建技术得到的单
视角点云数据,轮廓线矫正方法能获得回转体的全视角结构模型,且其建模结果精度更
高,但存在尺度与空间位置的不确定性,在理论上,可通过增加照片数量解决。单张照
片的回转体重建方法,需要对图像中对回转结构进行检测和定位,目前往往通过纯手动
选定或是半手动的方式给出轮廓线
[71]
,难以用于机器人等无人系统中。
1.3 研究内容和章节安排
1.3.1 主要工作
本课题的主要内容是融合回转结构的语义 SLAM 方法研究,包括三部分研究内容:
回转体检测与分割,基于单张照片的回转体比例建模以及回转结构与视觉 SLAM 融合方
法。
(1)回转体检测与分割。首先,在网络上收集回转体照片,并进行图像标注,构建
用于深度学习模型训练的回转体检测与分割数据集;其次,对 Mask R-CNN 物体检测与
分割模型在所收集数据集上进行训练,得到用于检测与分割回转体的深度学习模型,利
用训练所得模型对回转体照片进行检测与分割,得到初步回转体分割结果;然后,将检
测与分割结果作为先验知识,使用 Grabcut
[76]
前景分割方法,得到较为准确的回转体分割
万方数据

剩余101页未读,继续阅读
2022-08-04 上传
2022-11-11 上传
2019-10-11 上传
2023-10-23 上传
2024-03-09 上传
2023-09-12 上传
2023-08-12 上传
2023-07-14 上传
2023-07-27 上传

经年哲思
- 粉丝: 25
- 资源: 329
 我的内容管理
展开
我的内容管理
展开







最新资源
- 磁性吸附笔筒设计创新,行业文档精选
- Java Swing实现的俄罗斯方块游戏代码分享
- 骨折生长的二维与三维模型比较分析
- 水彩花卉与羽毛无缝背景矢量素材
- 设计一种高效的袋料分离装置
- 探索4.20图包.zip的奥秘
- RabbitMQ 3.7.x延时消息交换插件安装与操作指南
- 解决NLTK下载停用词失败的问题
- 多系统平台的并行处理技术研究
- Jekyll项目实战:网页设计作业的入门练习
- discord.js v13按钮分页包实现教程与应用
- SpringBoot与Uniapp结合开发短视频APP实战教程
- Tensorflow学习笔记深度解析:人工智能实践指南
- 无服务器部署管理器:防止错误部署AWS帐户
- 医疗图标矢量素材合集:扁平风格16图标(PNG/EPS/PSD)
- 人工智能基础课程汇报PPT模板下载
