三维仓储物流路径规划:基于A*算法的研究
需积分: 0 196 浏览量
更新于2024-08-05
收藏 2.72MB PDF 举报
"基于A*算法的通用仓储物流三维路径规划研究"
本文主要探讨了在仓储物流领域中,如何通过三维路径规划提升效率和灵活性。针对仓库作为物流转运中心的需求,尤其是随着拣选机构跨层作业的引入,仓储系统的效率得到了显著提升,同时也降低了错误订单率和人工成本。传统二维路径规划方法对于不同仓库结构适应性不足,需要针对每个特定仓库重新设计算法,这限制了模型的利用率。因此,研究者方华等人提出了一个通用的三维路径规划模型,旨在解决这一问题。
该研究基于栅格化的仓储环境,考虑到设备能耗和拣选时间两个重要因素,构建了一个兼顾水平和垂直方向运动的优化目标函数。为了解决这一问题,他们设计了一种分段启发函数的A*算法,该算法能有效处理拣选设备在不同方向上的运动特性。A*算法以其优秀的性能和寻路效率,被广泛应用于路径规划问题,特别是在存在复杂约束的情况下。
文章通过MATLAB进行仿真验证了所提出的通用模型的可行性。这种模型能够适应不同结构的仓库,减少了对特定算法设计的需求,提高了模型的通用性和效率。举例来说,ADAPTO 3D穿梭小车系统和SFS公司的跨层穿梭车系统都是跨层作业的实例,它们证明了这种作业方式在提高效率、降低成本方面的显著优势。
此外,文章还提及了具有三维空间运动能力的移动机器人,如MAV(微型空中车辆)、UAV(无人驾驶航空器)、UUV(无人水下航行器)和AUV(自主水下航行器),这些领域的研究为仓储物流中的三维路径规划提供了灵感和技术基础。虽然这些机器人通常用于更复杂的环境,但它们的智能导航技术对于优化仓储物流路径规划具有重要的借鉴价值。
这项研究通过A*算法和三维路径规划模型,为仓储物流提供了一个更加灵活和高效的解决方案,尤其适用于跨层作业的现代仓储系统。这种方法不仅可以减少设计成本,还可以提高整个仓储系统的运行效率,对物流行业的发展具有积极的推动作用。
【26】 第40卷 第7期 2018-07
基于A*算法的通用仓储物流
三维路径规划研究
Research on 3D path planning of universal
warehousing logistics based on A * algorithm
方 华
,
周奇才
,
熊肖磊
,
赵 炯
FANG Hua, ZHOU Qi-cai, XIONG Xiao-lei, ZHAO Jiong
(
同济大学 机械与能源工程学院
,
上海 201800
)
摘 要:
仓库作为物流转运的中心,追求低错单率和低人工成本,提高仓储系统的整体运转效率,成为
其发展的主要目标。拣选机构跨层作业作为一种新的解决方案,提高了仓储系统的效率也提
高了系统灵活性,使得仓储物流路径规划的约束变少。传统的仓储物流路径规划局限于某一
特定仓库,设计一种相对适用的路径规划模型,且多为二维路径规划。但不同的仓库结构要
重新设计算法,模型利用率不高。跨层作业此类约束较少甚至无约束的三维仓储路径规划研
究不多。文章基于栅格化的仓储环境,提出一种通用的仓库拣选三维路径规划模型,从设备
能耗、拣选时间两方面考虑设计目标函数,拣选设备水平、竖直方向运动特性不同,设计分
段启发函数的A*算法进行求解,并用matlab进行仿真,验证了模型的可行性。
关键词:
仓储物流;三维路径规划;A*算法;通用模型
中图分类号:
TP29
文献标识码
:A
文章编号:
1009-0134(2018)07-0026-06
收稿日期:2018-02-02
作者简介:
方华
(
1994
-
),
男
,
江苏人
,
硕士研究生
,
研究方向为现代物流技术装备控制及自动化
。
0 引言
跨层作业逐渐成为仓储物流提高效率的趋势之一。
ADAPTO是范德兰德公司为了减轻企业仓储配送压力而
专门设计的一款创新的3D穿梭小车。ADAPTO逐渐弱
化了仓储系统层与层、巷道与巷道之间的隔离,同一个
3D穿梭车可以自由的穿梭于货架任意位置,不局限于
巷道与层之间。同样,瑞士的建筑五金供应商SFS采用
的跨层穿梭车系统,立库有17层,这17层仅配备了3台
穿梭车,共5个巷道,整个立库仅用15台穿梭车,系统
设计不仅降低成本,作业效率也非常高
[1]
。跨层作业极
大地增加了拣选作业的灵活性。
具有3维空间运动能力的典型移动机器人,现在研
究较多的是各类空间和水下机器人。其中,智能程度较
高的包括MAV、UAV、UUV、AUV等
[2]
。智能仓储物
流领域使用拣选机器人十分广泛,但大部分路径规划研
究局限于二维路径规划,类似跨层作业此类约束较少甚
至无约束的通用仓储模型三维路径规划少有研究涉及,
本文提出一种通用的仓库拣选三维路径规划模型,并设
计了与之匹配的寻优算法。
1 问题分析
1.1 仓储环境描述
通用立体仓库模型中的拣选小车路径规划问题是一
个三维路径规划,目前研究较多的是无人机(UAV)的
三维路径规划,仓储环境下的全地图三维路径规划研究
并不多见。无人机三维路径规划的环境威胁包括地图环
境威胁、雷达侦查威胁、敌军导弹辐射范围威胁等。仓
储拣选设备的路径规划与之对比,显然仓库里的拣选车
辆路径比较规则,通常只有水平、竖直直线运动,相比
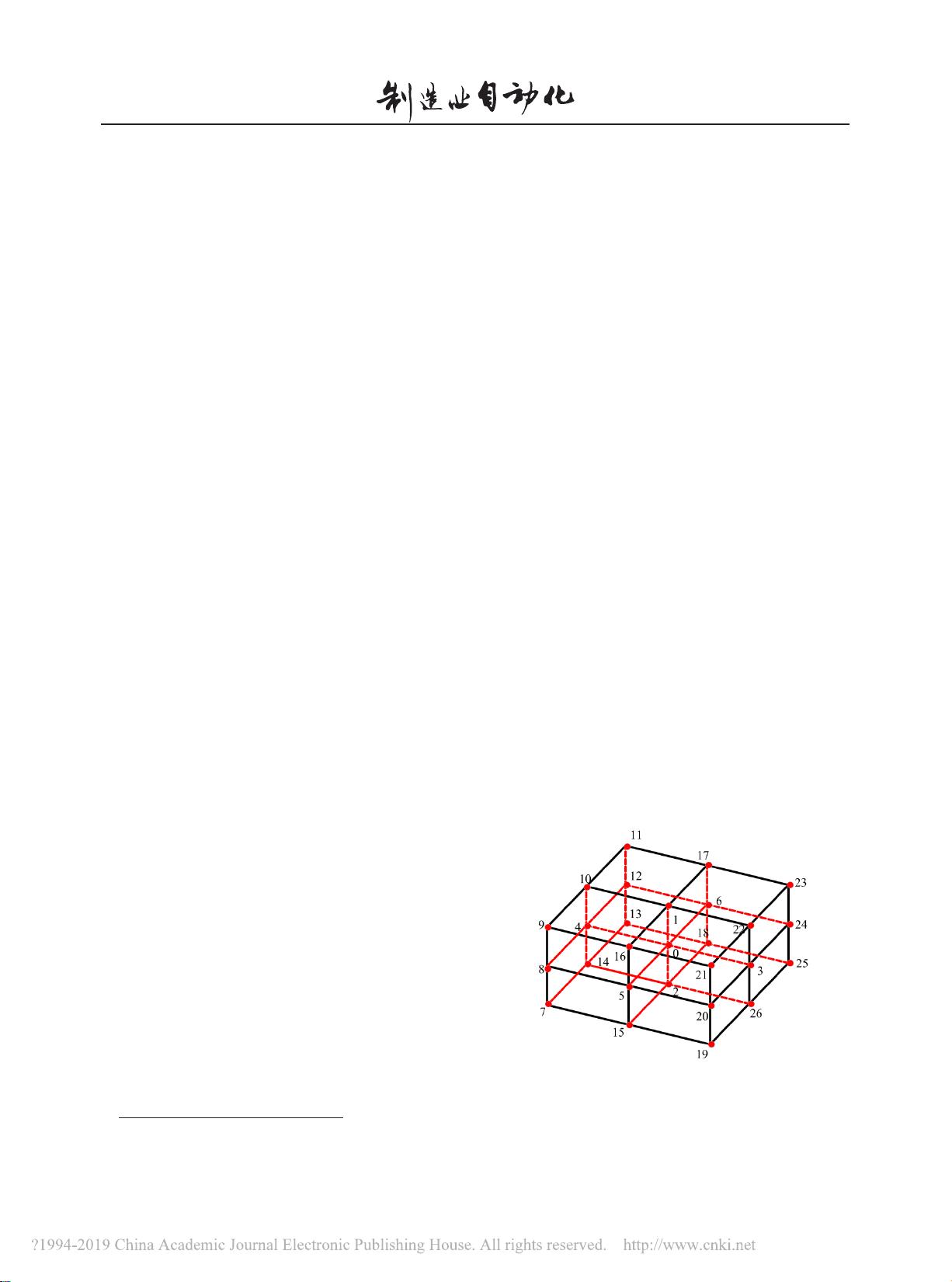
于无人机的飞行轨迹较为简单,一个无人机的路径选择
在栅格空间中可以有26个方向
[3]
(如图1所示)。一个
仓储机器人的路径选择在空间中通常只有6个方向,如
图2所示。
图1 无人机
(
UAV
)
运动方向
下载后可阅读完整内容,剩余5页未读,立即下载
2021-09-10 上传
2021-09-10 上传
520 浏览量
1658 浏览量
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情









