多目标多播路由遗传算法MulRoGA:一种经典优化方法
需积分: 9 2 浏览量
更新于2024-07-18
收藏 1.52MB PDF 举报
MulRoGA: A Multicast Routing Genetic Algorithm Approach 是一篇发表在2010年6月《应用智能》(Applied Intelligence)期刊上的研究论文,其作者是Aluizio F. R. Araújo和Cícero Garrozi。这篇经典的研究着重于多播路由问题,特别是采用遗传算法(Genetic Algorithm, GA)的多目标优化方法。在多播网络中,数据需要同时发送到多个接收节点,而有效的多播路由设计不仅要考虑带宽效率,还要关注延迟、可靠性和其他性能指标,这些构成了多目标优化问题。
论文的核心内容是提出了一种名为MulRoGA的算法,它将遗传编程技术应用于解决多播路由问题。遗传算法在此情境下被用来模拟自然选择和进化过程,通过一代代迭代来搜索可能的最佳路由路径组合,以满足多个目标函数。这种算法的优势在于能够处理复杂的问题,并且能够找到全局最优解或近似最优解,尤其是在面对动态网络环境时,其适应性和灵活性至关重要。
MulRoGA的关键贡献在于其设计了适应性较强的多目标优化框架,能够在满足服务质量的同时兼顾网络资源的高效利用。通过种子讨论、统计分析以及作者的个人资料,我们可以看到该研究的影响和后续工作。Aluizio F. R. Araújo在联邦佩尼亚布洛科大学有丰富的研究成果,共发表了124篇论文,获得了992次引用,而Cícero Garrozi则来自巴西农村联邦大学,虽然论文数量较少,但也有10篇,得到32次引用。
文章本身在2008年10月29日首次在线发布,Springer Science+Business Media出版,DOI为10.1007/s10489-008-0148-5。全文探讨了如何将遗传算法与多播路由结合,提供了一种创新的方法来处理现实网络中的复杂多目标问题。阅读这篇文章不仅可以深入理解遗传算法在多播路由中的应用,还能学习如何在实际网络环境中平衡多个性能指标,这对于网络管理员和研究人员来说是一份极具价值的参考资料。
332 A.F.R. Araújo, C. Garrozi
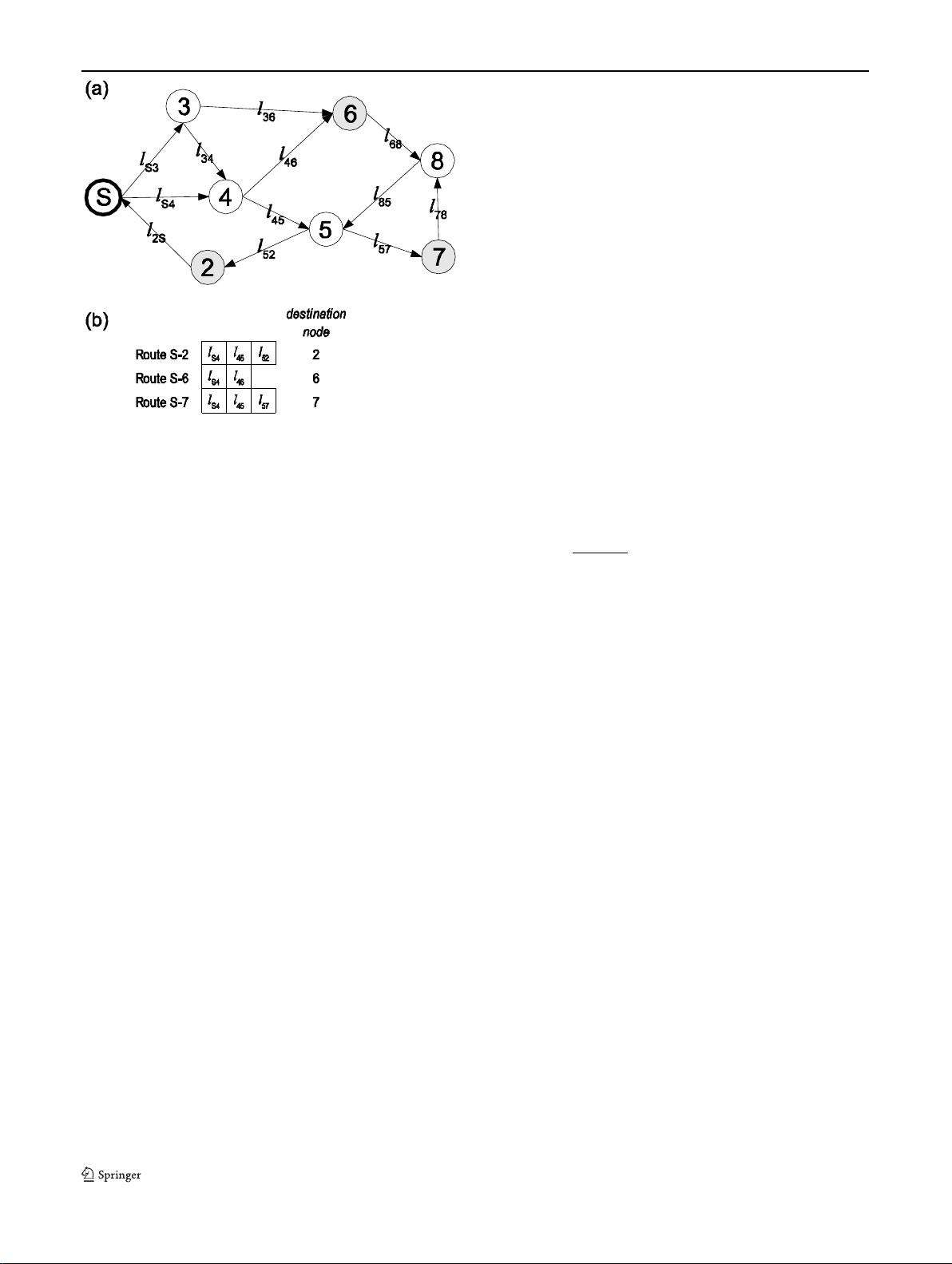
Fig. 1 A representation example: (a) A network with source node S
and twelve unidirectional links. The gray nodes form the multicast
group; (b) An individual with three chromosomes (routes) and a vari-
able number of genes (links)
links. A viable route (a feasible chromosome) must have
a sequence of links from the initial node to a destination
node which are topologically connected, i.e., each pair of
links must share a common node, so that, at the end of each
feasible chromosome, the destination node is reached. Fig-
ure 1 shows an instance of an individual with three chromo-
somes. From this point onwards, a route is defined as a set of
paths from the source-node (S) to a destination node (D
i
),
whereas a multicast route is defined as the routes from S
(starting node) to the multicast group (D
i
,i =1,...,M).
The randomly generated initial population takes into ac-
count the existence of actual connections between two con-
secutive network nodes as a local constraint. An empty chro-
mosome is filled as follows: choose randomly a link, from
the source node to any other node in the network, and place it
at the first locus; fill the subsequent loci following the same
procedure. A link cannot be selected more than once, hence,
whenever there are no viable links to be chosen at any step,
the chromosome is not completely filled and the destination
node is not reached. Thereafter, variation operators will act
to improve incomplete paths.
2.2 Multiobjective optimization problems
A general multiobjective optimization problem (MOP) com-
bines two or more objectives to determine the overall goal.
Such objectives often affect each other in complex and non-
linear ways [27]. Formally, a MOP can be stated as:
Find the vector X
∗
=[x
∗
1
,x
∗
2
,...,x
∗
u
]
T
that optimizes the
function:
G(X) =(g
1
(X), g
2
(X),...,g
u
(X)) (1)
satisfying the constraints of m inequality
h
i
(X) ≥0 i =1, 2,...,m (2)
and the constraints of (z −m) equality
h
j
(X) =0 j =m +1,m+2,...,z (3)
where X is the vector of decision variables [28], and g
v
(X)
with v = 1,...,u are objective functions often mutually
conflicting in nature. In some approaches, the constraints
are also treated as objective functions. There are also ap-
proaches in which a number of objectives are treated as con-
straints in order to reduce the dimensionality of the objective
space [29].
The current problem takes into consideration three ob-
jectives, hence the aim is to maximize the function G(X) =
(g
1
(X), g
2
(X), g
3
(X)) in which g
1
(X), g
2
(X), and g
3
(X)
consider the number of common paths, the total length of the
route, and a reward for viable routes (or absence of violated
constraints), respectively. Hence, the objective function is
given as follows
G(X) =1 −
ω
1
g
1
(X)
ω
2
g
2
(X)
+ω
3
g
3
(X) (4)
where ω
1
,ω
2
,ω
3
are the weights of real value functions.
Equation (4) is subject to constraints which limit the maxi-
mum and the minimum number of links of a route and es-
tablish the connections of each route, as follows:
q,r∈H
i
l
qr
≤L
max
(5)
q,r∈H
i
l
qr
≥L
min
(6)
q,r,s∈H
i
l
qr
·l
rs
=1 with q =s (7)
where q,r,s are indices of the network nodes in each chro-
mosome (route) H
i
,i =1,...,M, and l
jk
is a potential link
(gene) from node j to node k within route H , i.e., l
jk
is an
element of the network connection matrix which has values
of 0 for each link absent or of 1 for each existing link. For
this case, L
max
=L;L
min
=1. Equations (5)–(6) restrict the
minimum and maximum number of paths and (7) checks if
each path is actually connected within the network, taking
the value 1 if it is fully connected and value 0 otherwise.
2.3 Fitness function
In this paper we propose the following fitness function. The
objective function (4) is transformed into a fitness function
剩余16页未读,继续阅读
2009-07-05 上传
2021-02-21 上传
2021-02-22 上传
点击了解资源详情
2021-02-09 上传
2019-04-02 上传
2021-04-22 上传

solibear
- 粉丝: 7
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 平尾装配工作平台运输支撑系统设计与应用
- MAX-MIN Ant System:用MATLAB解决旅行商问题
- Flutter状态管理新秀:sealed_flutter_bloc包整合seal_unions
- Pong²开源游戏:双人对战图形化的经典竞技体验
- jQuery spriteAnimator插件:创建精灵动画的利器
- 广播媒体对象传输方法与设备的技术分析
- MATLAB HDF5数据提取工具:深层结构化数据处理
- 适用于arm64的Valgrind交叉编译包发布
- 基于canvas和Java后端的小程序“飞翔的小鸟”完整示例
- 全面升级STM32F7 Discovery LCD BSP驱动程序
- React Router v4 入门教程与示例代码解析
- 下载OpenCV各版本安装包,全面覆盖2.4至4.5
- 手写笔画分割技术的新突破:智能分割方法与装置
- 基于Koplowitz & Bruckstein算法的MATLAB周长估计方法
- Modbus4j-3.0.3版本免费下载指南
- PoqetPresenter:Sharp Zaurus上的开源OpenOffice演示查看器
