互补滤波器与KALMAN滤波器对比分析
"这篇文章对比了互补滤波器与卡尔曼滤波器在实际应用中的特点,帮助读者理解这两种滤波器的优势与适用场景,并通过航空项目中的传感器数据举例说明。"
在信号处理和数据分析领域,滤波器是至关重要的工具,它们能够去除噪声并提取出有用的信息。互补滤波器和卡尔曼滤波器都是常用于估计和融合不同传感器数据的算法,但它们的原理和适用范围有所不同。
1. **互补滤波器 (Complementary Filter, CF)**:
- **工作原理**:互补滤波器主要用于处理那些在一个频率范围内表现良好而在另一个频率范围内表现不佳的传感器数据。例如,在姿态估计中,加速度计在低频(长周期)变化时提供准确的数据,而陀螺仪在高频(短周期)变化时表现优秀。互补滤波器将两者的结果结合起来,以实现全频段的准确估计。
- **优势**:结构简单,易于实现,计算量小,适合资源有限的嵌入式系统。
- **应用场景**:无人机、机器人和移动设备的姿态估计,尤其是在实时性要求较高的场合。
2. **卡尔曼滤波器 (Kalman Filter)**:
- **工作原理**:卡尔曼滤波器是一种基于数学模型和统计假设的最优估计方法,它考虑了系统的动态行为和测量噪声,能自适应地调整权重,提供最小均方误差的估计。
- **优势**:理论上最优,能处理线性高斯噪声的动态系统,能融合多个输入源的信息。
- **应用场景**:导航系统(如飞机、船只和车辆),雷达和遥感数据处理,金融市场预测等复杂环境下的估计问题。
在航空项目中,例如OHS(外翼水平稳定器)或导航传感器的集成,会涉及到多种类型的传感器,如GPS、惯性传感器(陀螺仪和加速度计)、气压传感器等。这些传感器各有优缺点,卡尔曼滤波器可以充分利用它们各自的优势,通过一个统一的框架进行数据融合,提高整体的定位和导航精度。
互补滤波器适用于资源受限且对实时性要求高的场景,而卡尔曼滤波器则在需要最优估计且系统模型满足特定条件的情况下更为合适。选择哪种滤波器取决于具体的应用需求、传感器特性和计算资源。在实际应用中,理解并比较这两种滤波器的性能和限制是至关重要的。
Complementary Filter (CF)
Often, there are cases where you have two different measurement sources for
estimating one variable and the noise properties of the two measurements
are such that one source gives good information only in low frequency region
while the other is good only in high frequency region.
Æ You can use a complementary filter !
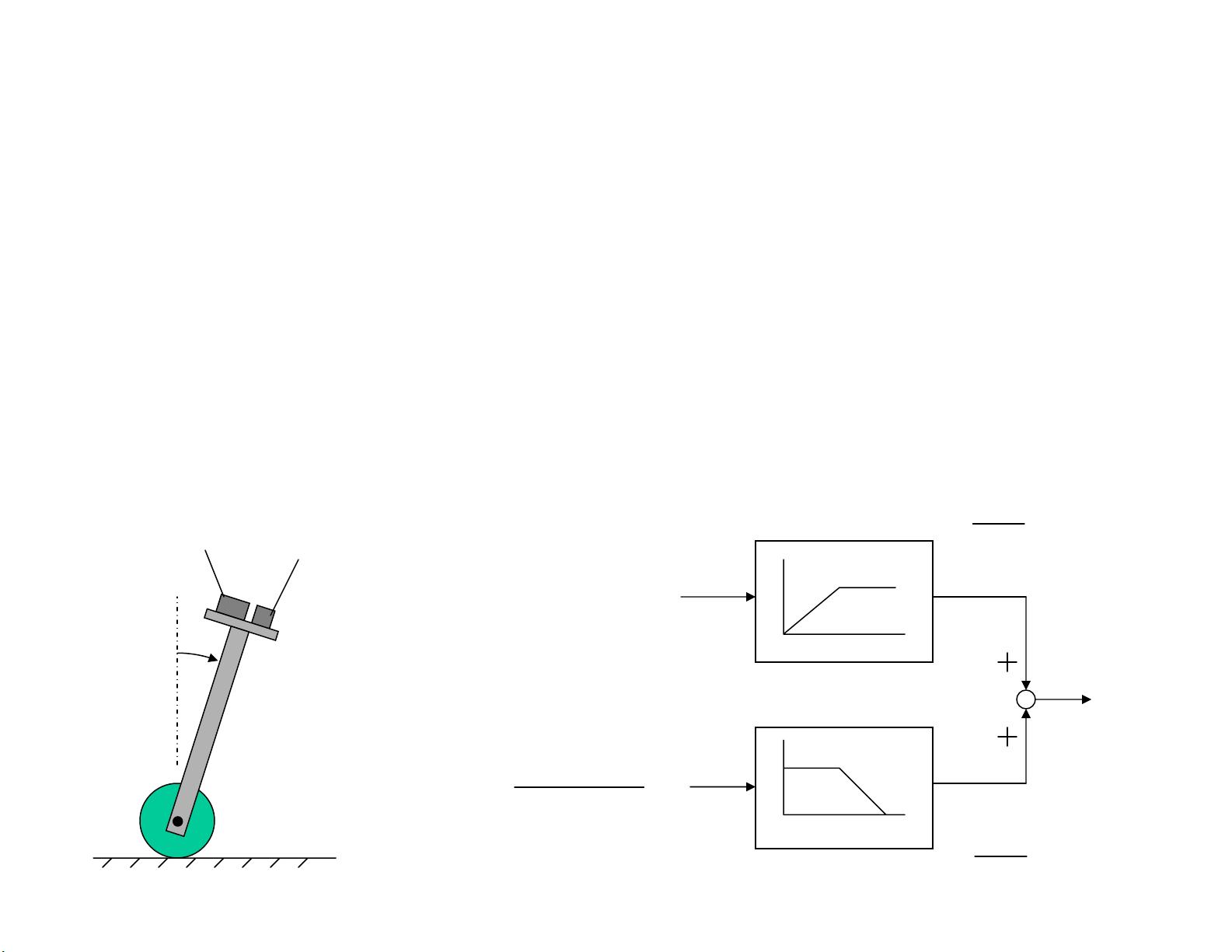
Example : Tilt angle estimation using accelerometer and rate gyro
≈
∫
rate)(angular dt
- not good in long term
due to integration
outputaccel.
⎞
⎟
⎠
+
τ
τ
⎛
⎜
⎝
s
1
examplefor,
s
=
est
θ
accelerometer rate gyro
High Pass Filter
⎞
⎛
θ
θ
1
g
- not proper during fast motion
⎞
⎟
⎠
τ
=
⎛
⎜
⎝
1
s +
−
sin
1
- only good in long term
Low Pass Filter
⎟
⎟
⎠
⎜
⎜
⎝
≈
θ
下载后可阅读完整内容,剩余14页未读,立即下载
相关推荐
2017-12-28 上传
2024-11-01 上传
2024-11-01 上传
2024-11-01 上传
250 浏览量
1688 浏览量

xiaohuihoujun
- 粉丝: 2
 我的内容管理
展开
我的内容管理
展开








最新资源
- 掌握Python表格PDF抓取技巧
- pptk:面向点云数据的直观可视化工具
- TeamCity使用情况的统计分析与迁移细节
- input-range-scss:打造跨浏览器的范围输入样式解决方案
- Ticker插件:简洁时钟,新标签页的时间显示专家
- 用OpenCV和QT实现计算机视觉测量项目
- Roff压缩包子文件分析
- 巴塞尔大学IT团队开发的Chocolatey自动软件包库
- 重构axios库:TypeScript的实践指南
- 2020年MIT805大数据考试资料与工具库概览
- ReactJs个人简历网站搭建教程与实践
- Oracle数据库与Java技术结合的测试实践
- IOCP Socket服务器设计及源码实现
- 掌握C#编码技巧:Kata练习详解
- ESP8266控制可寻址LED灯条的FastLED Web服务器
- UE4 C++插件TextRenderPlugin测试教程











