

I V I ST A XX - X X X X - X X X X - X X - XX XX
7
被测车辆制造商更改导航智能驾驶功能激活条件,但以上方式均需证明不会更改被测车辆导
航智能驾驶的安全性。
5 试验方法
5.1 基本要求
导航智能驾驶测评包括车辆安全性测试和功能完成度测试。其中,车辆安全性测试考察
被测车辆在典型场景下的避撞能力,即被测车辆的安全底线;功能完成度测试考察被测车辆
在道路上行驶,能否顺利完成不同场景下的驾驶任务,并给驾驶员及乘客带来好的体验。
5.2 车辆安全性测试
5.2.1 车辆安全性测试由模拟仿真及封闭场地试验构成。
5.2.2 模拟仿真试验作为封闭场地试验的前置流程,提供封闭场地试验实施所需的主车试验
车速,即仿真临界线。
5.2.3 仿真临界线是在模拟仿真试验中,主车在各测试场景下能够成功避撞所对应的最大速
度。
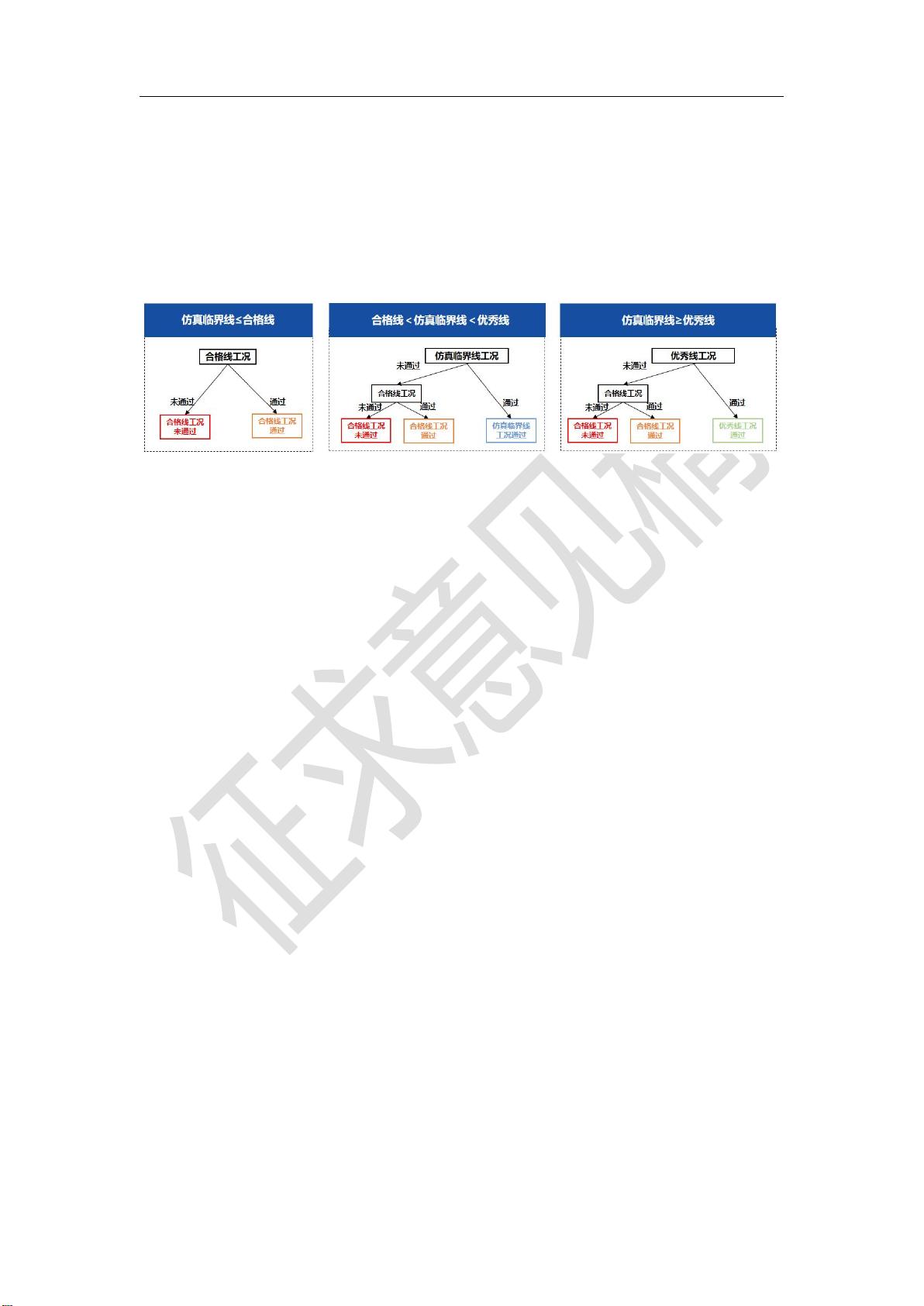
5.2.4 封闭场地试验中,合格线、仿真临界线与优秀线测试工况如下:
a) 合格线测试工况:在各测试场景下,主车以 60km/h 的速度进行测试所对应的工况;
b) 仿真临界线测试工况:在各测试场景下,主车以仿真临界线速度进行测试所对应的
工况;
c) 优秀线测试工况:在各测试场景下,主车以 120km/h 的速度进行测试所对应的工况。
注:若被测车辆 ODC 允许的导航智能驾驶功能最高车速在 80-120km/h 之间,则以被测车辆 ODC 允许的
最高车速作为优秀线进行测评。
5.2.5 模拟仿真试验由被测车辆的生产制造商提供仿真测试报告。
5.2.6 若被测车辆的生产制造商未提供仿真测试报告,则按照合格线测试工况进行封闭场地
试验。
5.2.7 根据被测车辆的生产制造商所提供的仿真临界线,封闭场地试验包含以下三种情况,
如图 6 所示:
a) 若所提供的仿真临界线对应车速小于等于合格线对应车速(60km/h),则按照合格线
测试工况进行封闭场地对应场景的试验;
b) 若所提供的的仿真临界线对应车速介于合格线和优秀线对应车速之间,即合格线对
应车速(60km/h)<仿真临界线对应车速<优秀线对应车速(120km/h),则按照仿真临界线
剩余46页未读,继续阅读

_Greeeen_
- 粉丝: 9
- 资源: 18
 我的内容管理
展开
我的内容管理
展开







最新资源
- 李兴华Java基础教程:从入门到精通
- U盘与硬盘启动安装教程:从菜鸟到专家
- C++面试宝典:动态内存管理与继承解析
- C++ STL源码深度解析:专家级剖析与关键技术
- C/C++调用DOS命令实战指南
- 神经网络补偿的多传感器航迹融合技术
- GIS中的大地坐标系与椭球体解析
- 海思Hi3515 H.264编解码处理器用户手册
- Oracle基础练习题与解答
- 谷歌地球3D建筑筛选新流程详解
- CFO与CIO携手:数据管理与企业增值的战略
- Eclipse IDE基础教程:从入门到精通
- Shell脚本专家宝典:全面学习与资源指南
- Tomcat安装指南:附带JDK配置步骤
- NA3003A电子水准仪数据格式解析与转换研究
- 自动化专业英语词汇精华:必备术语集锦
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


