基于级联卷积神经网络的场景文本检测与分割方法
177 浏览量
更新于2024-08-28
收藏 1.25MB PDF 举报
"基于级联卷积神经网络的场景文本检测与分割"
这篇研究论文"Scene Text Detection and Segmentation Based on Cascaded Convolution Neural Networks"深入探讨了计算机视觉领域中的两个关键且具有挑战性的问题:场景文本检测和分割。作者Youbao Tang和Xiangqian Wu提出了一种创新的方法,该方法利用级联卷积神经网络(CNNs)来实现这两项任务。
首先,论文中设计并训练了一个基于CNN的文本感知候选文本区域(Candidate Text Region, CTR)提取模型,称为检测网络(DNet)。DNet利用文本的边缘信息和整个区域信息来检测粗略的CTR,从而减少了传统方法中候选区域的数量,同时保留了更多的真实文本区域。
接下来,为了精确地分割这些粗略的CTR,构建了一个基于CNN的CTR细化模型,名为分割网络(SNet)。SNet的作用是对DNet检测出的粗略CTRs进行精细化处理,将它们分割成文本,进一步得到精炼的CTRs。
最后,论文使用一个基于CNN的CTR分类模型,即分类网络(CNet),对精炼的CTRs进行分类,以获得最终的文本区域。所有这些CNN模型都进行了适当的修改和优化,以适应场景文本检测和分割的具体需求。
这篇论文发表在2017年3月的IEEE Transactions on Image Processing, Vol. 26, No. 3上,展示了深度学习技术在解决复杂场景中的文本检测和分割问题上的强大潜力。这种方法通过级联多个CNN模型,实现了从粗到精的逐步处理,有效地提高了检测和分割的精度,减少了误检和漏检的情况。
这项工作对于理解如何利用深度学习技术改进文本检测和分割算法具有重要意义,它不仅有助于提升自动文本识别系统的性能,还可能推动相关领域的技术进步,如自动驾驶、图像理解和智能监控等。
TANG AND WU: SCENE TEXT DETECTION AND SEGMENTATION BASED ON CASCADED CNN 1511
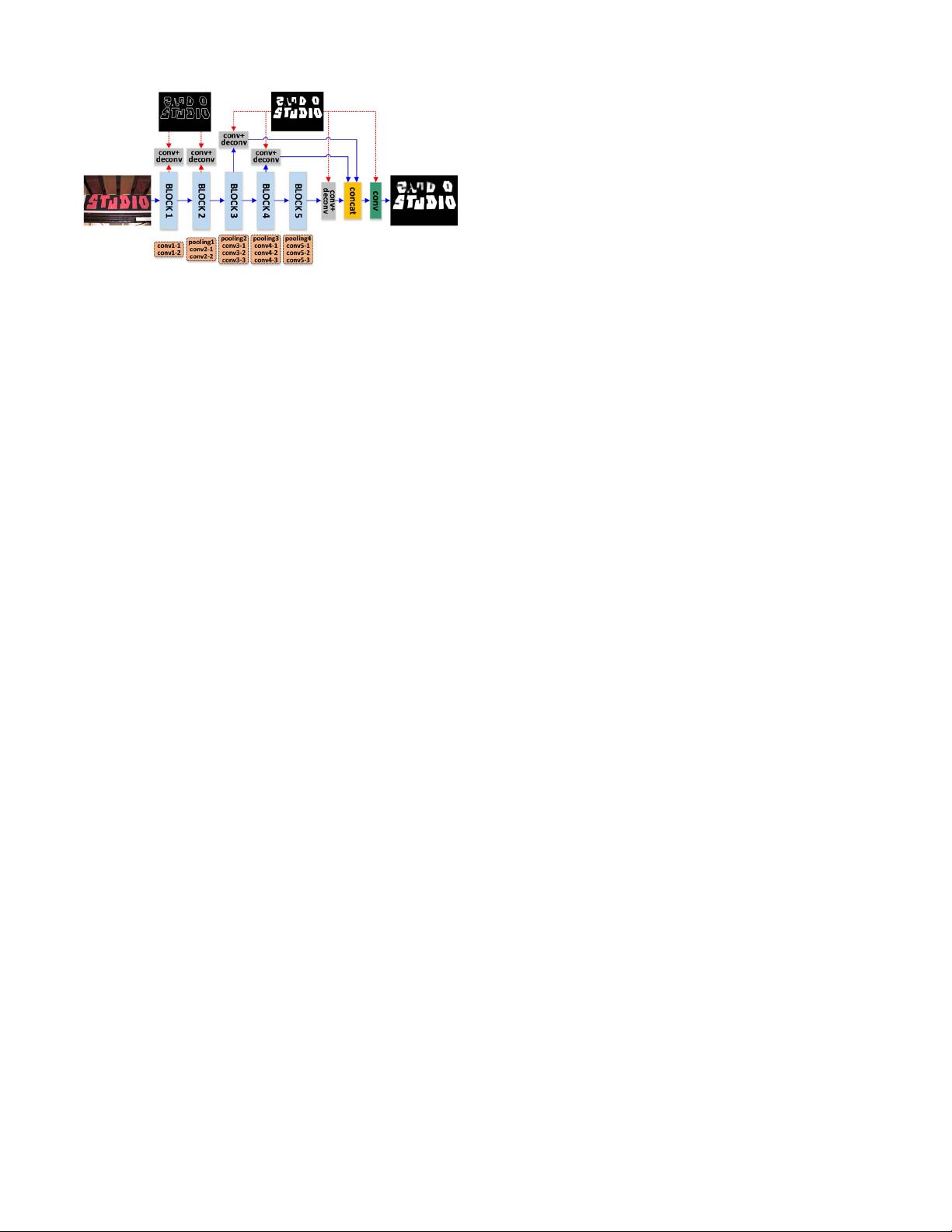
Fig. 3. The architecture of DNet.
To make DNet focus on the text regions, the information
which reflects the properties of the text is used as supervisory
information to train the CNN model. The shape of the text
regions is one of the most important pieces of information for
distinguishing between text and backgrounds. The edges and
the whole regions of text can represent its shape. As we know,
CNN learns local and global features as we move from the
shallow to deep layers. For text, the edges can be considered
as local information and the regions as global information.
Therefore, in this work, the edges and regions of text are used
as the supervisory information of the shallow and the deep
layers of the CNN for model training, respectively.
To get an accurate saliency prediction, the CNN architecture
should be deep and have multi-scale stages with different
strides, so that we can learn discriminative and multi-scale
features for pixels. Training such a deep network from scratch
is hard work when the number training samples available is
insufficient. So this work chooses VGGNet-16 [41] trained on
the ImageNet dataset as the pre-trained model for fine-tuning
as done by [53]. VGGNet-16 has six blocks. The first five
blocks contain convolutional layers and pooling layers, and the
last block contains a pooling layer and fully connected layers.
The last block is removed in this work, since the pooling
operation in this block makes the feature maps become too
small (about 1
32 of the input image size) to obtain fine
full-size prediction and the fully connected layers are time
and memory consuming. Based on the first five blocks of
VGGNet-16, DNet is constructed as shown in Fig. 3. There
are thirteen convolutional layers and four max-pooling layers
in the five blocks. Specifically, the numbers of convolution
kernels in the five blocks are 64, 128, 256, 512 and 512. For all
convolutional layers, the size of all of the convolution kernels
is 3
∗
3, and both the stride and padding are 1 pixel. For all
max-pooling layers, the operation window size is 2
∗
2andthe
stride is 2 pixels.
As we know, the shallow CNN layers usually learn local
features, especially for edges and there are different kinds
of edges including those of text and background in natural
scene images. Therefore, only the edges of text are used as
supervisory information for the shallow layers to make the
CNN model pay more attention to the edges of text during
early feature learning in this work. Usually, the deep layers
learn the global object features. Therefore, the text regions
are used as the supervisory information for the deep layers, so
as to learn more discriminative global features to represent
the text properties. As we can see, from shallow to deep,
the whole DNet always focuses on learning the features of
text. We investigate which layers should be supervised by text
edges or regions and find that the best performance is obtained
when the first two and the last three blocks are supervised by
text edges and regions, respectively. He et al. [35] also used
text regions as supervisory information for model training, but
the text region was used as supervisory information in one
convolutional layer. In the proposed DNet model (as shown in
Fig. 3), the text regions are used as supervisory information in
four convolutional layers, and another important information
of text, i.e. the edges of text, is also used as supervisory
information in the shallow layers, which makes the model
pay more attention to the edges of text during early feature
learning.
To introduce the supervisory information into the CNN,
a side-output is generated, as done in [53], from the last
convolutional layer of each block with a convolutional layer
and a deconvolutional layer. The additional convolutional layer
with a 1
∗
1 convolution kernel converts the feature maps to a
probability map, and the additional deconvolutional layer is
used to render probability map the same size as the input
image. To make the final probability map robust to the size
variation of the text, the side-outputs of the last three blocks
are fused by concatenating them in the channel direction
and using a convolution kernel of size 1
∗
1toconvertthe
concatenation maps to the final probability map. In fact,
convolution with a 1
∗
1 kernel is a weighted fusion process.
Here, the side-outputs of the first two blocks are not considered
during fusion, since we hope to capture the global information
of the text regions during text-aware saliency prediction and
we have found through experiments that it does not improve
the performance to add the first two side-outputs during fusion.
So far, the whole architecture of DNet has been constructed,
as shown in Fig. 3. The additional deconvolutional layer and
last convolutional layer are followed by a sigmoid activation
function.
For DNet training, the errors between all side-outputs and
the supervisory ground truth should be computed and back-
ward propagated. Therefore, we need to define a loss function
to compute these errors. For most of the scene images, the
pixel numbers of text and background are heavy imbalanced.
Here, given an image X and its ground truth Y , a cross-
entropy loss function defined in [53] is used to balance the
loss between text and non-text classes as follows:
l
m
side
W,w
m
=−α
|
Y
+
|
i=1
log P
y
i
= 1|X; W,w
m
−
(
1 − α
)
|
Y
−
|
i=1
log P
y
i
= 0|X; W,w
m
(1)
where α =
|
Y
−
|
/
(
|
Y
+
|
+
|
Y
−
|
)
,
|
Y
+
|
and
|
Y
−
|
mean the num-
ber of text pixels and non-text pixels in the ground truth,
W denotes the parameters of all of the network layers in the
five blocks, w
m
denotes the weights of the m
th
side-output
layer including a convolutional layer and a deconvolutional
layer, and P
(
y
i
= 1|X; W,w
m
)
∈ [0, 1] is computed using
剩余11页未读,继续阅读
178 浏览量
229 浏览量
262 浏览量
153 浏览量
205 浏览量
147 浏览量
182 浏览量
204 浏览量
177 浏览量

weixin_38526421
- 粉丝: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- Linux与iOS自动化开发工具集:SSH免密登录与一键调试
- HTML5基础教程:深入学习与实践指南
- 通过命令行用sonic-pi-tool控制Sonic Pi音乐创作
- 官方发布droiddraw-r1b22,UI设计者的福音
- 探索Lib库的永恒春季:代码与功能的融合
- DTW距离在自适应AP聚类算法中的应用
- 掌握HTML5前端面试核心知识点
- 探索系统应用图标设计与ioc图标的重要性
- C#窗体技巧深度解析
- KDAB发布适用于Mac Touch Bar的Qt小部件
- IIS-v6.0安装文件压缩包介绍
- Android疫情数据整合系统开发教程与应用
- Simulink下的虚拟汽车行驶模型设计
- 自学考试教材《操作系统概论》概述
- 大型公司Java面试题整理
- Java 3D技术开发必备的jar包资源
