列车测速测距技术:多传感器选择与融合分析
需积分: 12 59 浏览量
更新于2024-09-13
收藏 60KB DOC 举报
本文主要探讨了列车运行系统中测速测距多传感器的选择与融合,涉及常用测速测距方法、各国列控系统的具体实践、多传感器融合的重要性以及相关建议和参考文献。
在列车测速测距技术中,常用的方法包括速度传感器、多普勒雷达、查询/应答器、惯性导航系统、GPS和电子地图匹配。速度传感器因其成本低、可靠性高而广泛应用,但面对空转、滑行等情况时,精度会受到影响。多普勒雷达直接测速,精度较高,但受列车动态影响可能产生误差。查询/应答器则能提供精确的点式定位,但仅限于固定点。惯性导航系统依赖于车体运动状态,对气候影响小,但对温度敏感且有长期误差累积。GPS定位简便、成本低,但受地形、建筑物遮挡及精度限制。电子地图匹配通过铁路网络几何特征识别,对直线路段定位效果不佳,且在车速变化大时难以准确。
各国列控系统在测速测距方面各有侧重,如法国AS-TREE系统使用多普勒雷达,北美系统倾向于GPS,而欧洲和日本系统结合了查询/应答器与速度传感器,德国LZB系统采用轨间电缆,美国AATC系统利用无线测距。
鉴于单一传感器的局限性,多传感器融合成为提高测速测距精度和鲁棒性的关键。融合多种传感器可以互补各自的不足,例如,速度传感器与惯性导航系统结合,可以校正空转、滑行误差;雷达与GPS结合,既能实现连续定位,又能减少遮挡影响。多传感器融合需要考虑数据融合算法,确保信息的有效整合和实时处理。
为了实现有效的多传感器融合,建议考虑以下几点:(1) 选择互补性强的传感器组合,以减少单一故障的影响;(2) 设计合适的融合算法,比如卡尔曼滤波、粒子滤波等,以优化信息融合过程;(3) 考虑系统的实时性和稳定性,确保在复杂环境下仍能稳定工作;(4) 对传感器进行定期校准,以减小长期误差积累;(5) 强化抗干扰能力,防止外部因素导致的测量误差。
参考文献[[i]、[ii]、[iii]、[iv]]提供了深入研究这些技术的起点,对于设计和优化列车运行控制系统具有重要价值。通过不断探索和实践,多传感器融合技术将在列车安全、高效运行中发挥越来越重要的作用。
关于测速测距多传感器的选择和融合
1. 常用测速测距方法
目前,在列车测速测距中主要有以下方法:
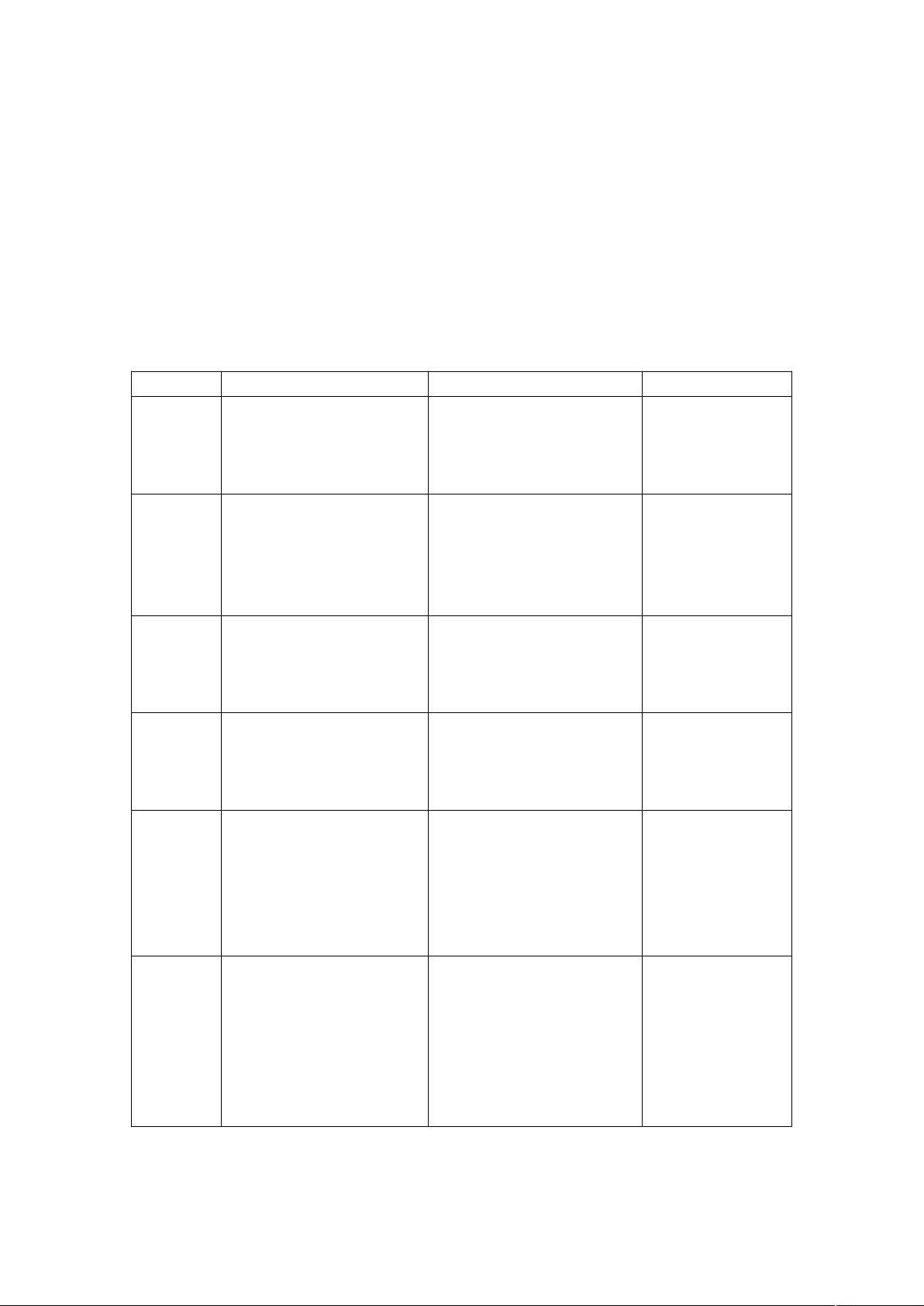
表格 1 常用测速测距方法
方法 特点 优点 缺点
速 度 传 感
器
测量单位时间内车轮的转
数,然后乘以轮径以换算
成列车 速度
应用普遍,成本低,可靠性
高
空 转 、 滑 行 、 蛇
行、轮径磨损等情
况下,会有较大误
差
多 普 勒 雷
达
利用多普勒频移效应测量
车体与大地之间的相对速
度
直接测速,精度较高 反射面特性影响性
能。列车 加速 / 制
动/ 振动 会导 致雷
达波与反射面的夹
角发生变化
查询/应答
器
储存里程等信息的多个应
答 器 离 散 地 铺 在 轨 道 中
央,车载查询器实时从应
答器读取定位信息
定位精确 只能提供点式定位
信息
惯性导航 利用陀螺、加速计测量车
体的运动变化快慢,以推
算出列车的速度、位置
对物理量的测量仅与车体本
身的运动状态变化有关,不
与外界发生光电联系,不受
气候影响
对温度比较敏感,
误差具有长期累积
性
GPS 地面设备接收 GPS 系统 4
颗卫星的数据,即可确定
自身的位置
设备简单、成本低、易于维
护
信号强度受地形、
建筑、树木等的较
大 影 响 , 存 在 盲
区 ; 民 用 精 度 不
高;受美国政府制
约
电 子 地 图
匹配
[1,2,3]
提取铁路网络路径中列车
方向角-行程曲线的典型几
何特征进行编码,存于计算
机数据库中。在运行中, 将
测量值与数据库中的角速
度进行匹配,进而得到列
车的位置。
这种方法将定位问题转化为
对铁轨网络几何特征段的定
性识别问题, 能克服 GPS 等
绝对定位系统不能分辨近距
离轨道的严重缺陷。
对直线路段不起作
用,车速过低或车
速变化过大时,效
果不好
下载后可阅读完整内容,剩余4页未读,立即下载

天外飞仙之福
- 粉丝: 2
- 资源: 58
 我的内容管理
展开
我的内容管理
展开







最新资源
- PeStudio 编程辅助软件 v8.66
- 153146_phase1
- 将数据从Arduino传输到Excel-项目开发
- 在vue3+ts+setup语法糖中使用图片预览组件
- Biofouling:此功能将输出结构上贻贝生长的典型所需值。-matlab开发
- 电影建议
- 中秋节模板HTML
- Noscxript Firefox浏览器安全插件
- koshots-server
- 租金预测-数据集
- Reflib-TSV:用于TSV文件的Reflib解析器
- Quote:提供随机报价-matlab开发
- BioTracker:Java粒子跟踪代码,使用FVCOM不规则网格流体动力学模型的输出
- F103_MINI开发板.rar
- 字体格式转换.zip,带使用方法
- thulai
