事件相机SLAM算法综述:定位与建图新视角
版权申诉
DOCX格式 | 1.48MB |
更新于2024-06-27
| 153 浏览量 | 举报
"这篇文档是关于基于事件相机的定位与建图算法的综述,讨论了SLAM技术在自动驾驶和机器人导航中的应用,以及不同传感器如GNSS、INS、Lidar、Radar和相机在SLAM中的作用。文章特别强调了相机作为传感器的优势和挑战,特别是单目和多目相机在获取深度信息方面的差异。还提到了RGB-D相机和视觉-惯性系统(VIS)在提升定位与建图性能上的贡献。"
在SLAM(同时定位与建图)技术中,事件相机作为一种新兴的传感器类型,因其独特的工作机制,在低光照、高速运动等环境下表现出色,能提供接近实时的高动态范围图像数据,从而在定位和环境理解方面展现出潜力。传统SLAM算法通常依赖于常规帧间图像差异,而事件相机则基于像素级别的亮度变化触发事件,这种异步数据流允许更快速地响应环境变化。
文章指出,相机传感器因其小巧、低成本、易于部署和提供丰富信息等特性,在SLAM中占据重要地位。单目相机SLAM虽然面临深度信息缺失和尺度不确定性的问题,但通过特征匹配和几何约束仍能实现基本的定位和建图。双目或多目相机系统则可以通过三角测量恢复深度信息,提高了定位精度和地图的完整性。
RGB-D相机,如微软的Kinect,通过主动投射红外结构光或TOF技术,可以直接获取场景的深度信息,为SLAM提供了一个更直接的解决方案,尤其是在室内环境中的应用。然而,RGB-D相机的范围和精度受到限制,且可能存在硬件故障或噪声问题。
另一方面,视觉-惯性系统(VIS)结合了相机和惯性测量单元(IMU),利用IMU的连续测量来校正视觉的漂移,同时利用视觉信息来提高定位精度,特别是在初始姿态估计和运动矫正上。这种融合方法显著提高了系统的鲁棒性和准确性,尤其是在动态环境中。
SLAM技术通过不断创新和传感器融合,持续推动着自动驾驶和机器人领域的进步。事件相机的引入为解决传统视觉SLAM的局限性提供了新的思路,而RGB-D相机和视觉-惯性系统则进一步提升了定位与建图的效率和可靠性。未来的研究将继续探索这些技术的潜力,以应对更加复杂和多样化的应用场景。
下载: 全尺寸图片 幻灯片
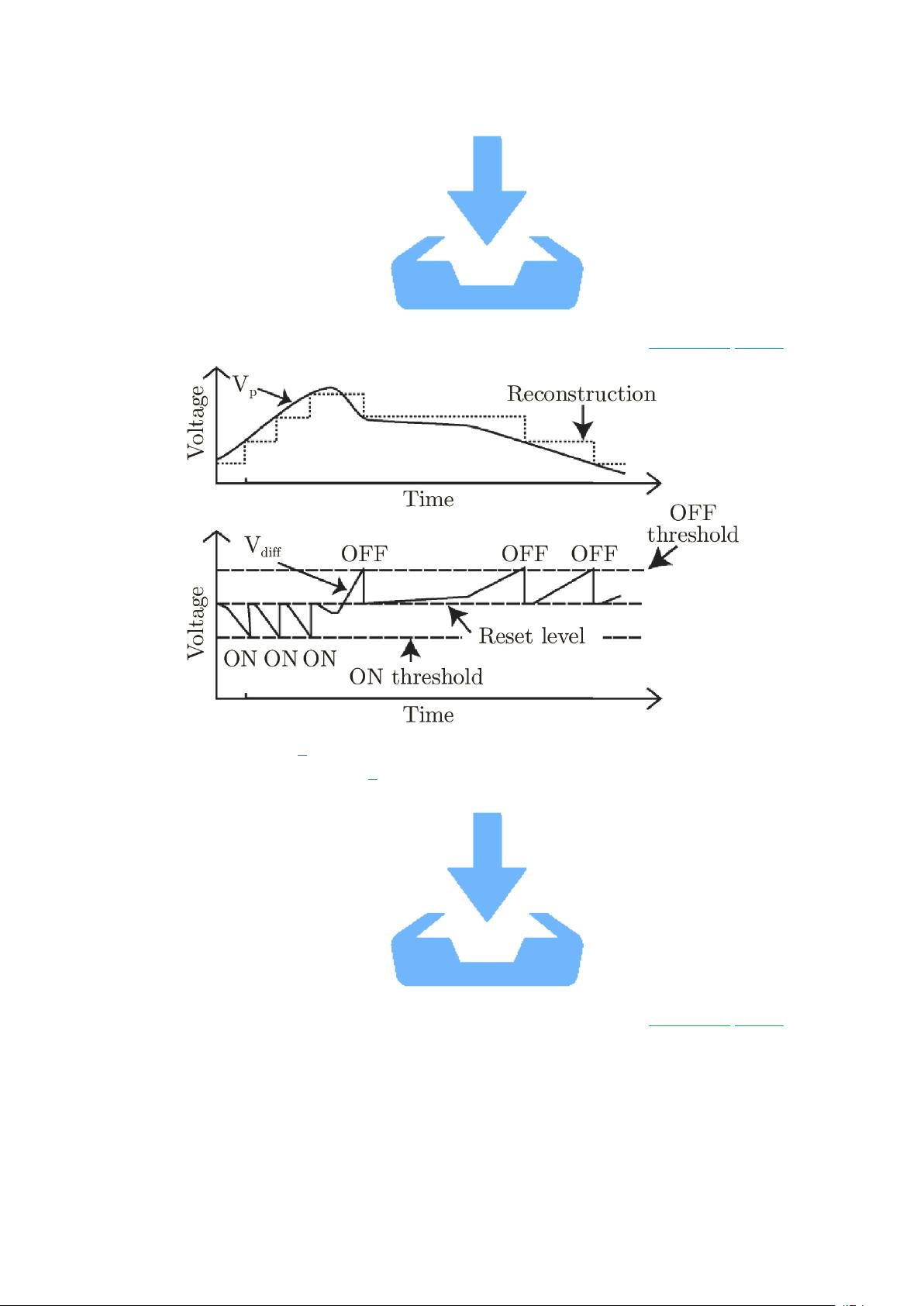
图 3 DVS 工作原理图
[34]
Fig. 3 Principle of DVS operation
[34]
下载: 全尺寸图片 幻灯片
通常, DVS 输出的事件 ekek 包含该事件发生的像素地址、时间和事件的类型(极性).
即 ek=(xk,ek=(xk,tk,pk),tk,pk), 其中 xk=(xk,yk)T,xk=(xk,yk)T, 表示像素地址; tktk 表示该事件
发生的时间; pk∈{+1,−1}pk∈{+1,−1}表示事件的极性, pk=+1pk=+1 为变亮事件, 反之则为
变暗事件. 规定在像素 xkxk 在 tktk 时刻的光强对数表示为
L(xk,tk)=L(xk,tk)=ln(I(xk,tk)),ln(I(xk,tk)), 其中 II 表示光照强度. 事件 ekek 被激发, 意味着
剩余15页未读,继续阅读
相关推荐




罗伯特之技术屋
- 粉丝: 4506
- 资源: 1万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- nRF905射频芯片文档
- symbian入门教程(创建工程)
- 嵌入式系统C语言编程
- 某某集团员工办公应用软件操作手册.pdf
- AIX_5L_Club_TestReport.doc
- T-SQL资料(很不错)
- 高校医院管理系统需求说明书
- 利用天语A615作为调制解调器让电脑上网操作方法.doc
- CCS2000的使用说明
- Beginning JavaScript with DOM Scripting and Ajax
- 高速缓冲存储器的功能
- zxld1350的英文资料
- 2440datasheet
- ASP.net 中用C#调用Java web service 图解教程
- 计算机组成原理习题答案
- redhat as3下安装oracle 9i
