通用贝叶斯网络在多类运动图像BCI EEG分类中的应用
164 浏览量
更新于2024-08-27
收藏 1.78MB PDF 举报
"这篇研究论文探讨了基于EEG的多类运动图像脑机接口(BCI)分类问题,提出了一个通用的贝叶斯网络(CBN)方法来解决实际应用中的挑战。现有的许多方法尝试估计EEG信号的不相关瞬时去混,以实现多类运动想象(MI)的分类,但这种方法在实际中并不适用,因为大脑区域之间存在部分或完全的合作。论文提出的CBN方法首先利用每个通道上的高斯混合模型约束,选择相关的通道构建一个普通的贝叶斯网络,然后识别具有共同父节点的节点,以揭示不同大脑区域之间的协作模式。通过这种方式,CBN能够更好地捕捉大脑活动模式,提高BCI分类的性能。"
本文是针对EEG信号处理和脑机接口技术的研究,特别是针对多类运动想象任务的分类。脑机接口(BCI)是一种直接连接人脑和外部设备的技术,它允许人们通过思维控制设备,无需肌肉或其他传统输出方式。在BCI系统中,EEG(脑电图)作为一种非侵入性的神经信号记录技术,广泛用于捕捉大脑活动。
文章指出,传统的EEG信号分类方法往往假设信号间独立,然而这种假设在大脑活动中并不成立,因为大脑区域之间存在复杂的交互作用。因此,研究团队提出了一种新的方法——通用贝叶斯网络(CBN)。CBN方法的核心是考虑通道之间的相关性,通过高斯混合模型在每个通道上进行建模,选择与任务相关性强的通道来构建网络。然后,CBN分析这些通道中节点间的依赖关系,找出共享父节点的节点,这有助于揭示大脑不同区域间的协同效应。
CBN的优势在于它能够更好地模拟大脑的实际工作模式,通过学习和模型化这些协作模式,可以提高BCI分类的准确性和可靠性。这对于发展更高效、更精确的BCI系统至关重要,尤其是在多类任务的场景下,如控制机器人、虚拟现实应用或者辅助残疾人士进行通信。
这篇研究论文对基于EEG的多类运动图像BCI分类提供了一个新的视角,即利用贝叶斯网络来捕捉大脑区域间的协作,这对于理解大脑功能以及提升BCI系统的性能具有深远的影响。未来的研究可能将深入探索如何优化CBN结构,以及如何将此方法应用于更多复杂的大脑活动任务。
This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
HE et al.: CBN FOR CLASSIFICATION OF EEG-BASED MULTICLASS MOTOR IMAGERY BCI 3
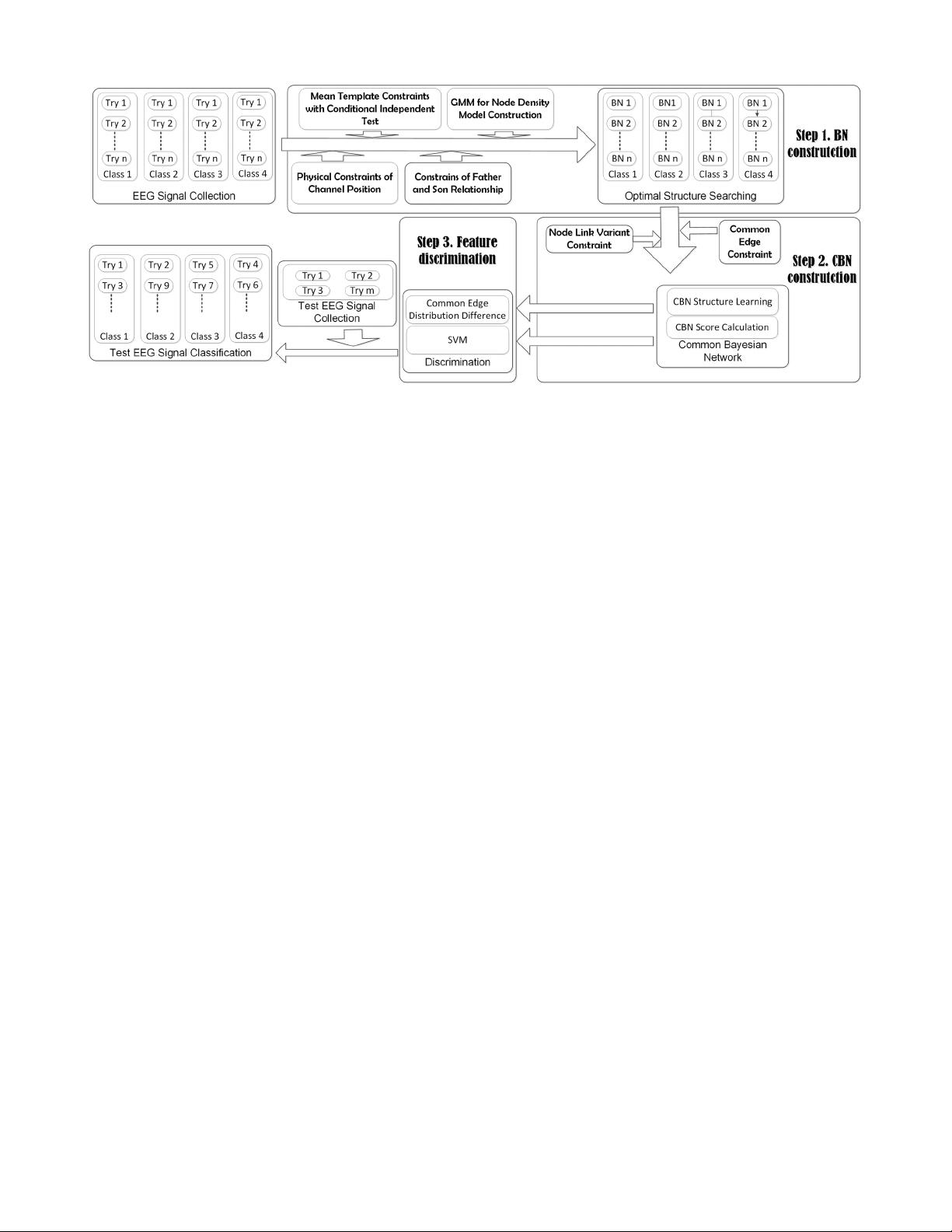
Fig. 2. Framework of the proposed CBN method.
space-time variants are extracted and organized at the same
time. The spatial information is shown in the structure and
time variant is represented in the edge probability. In the last
step, the features are selected based on common edges on the
position with structure variation in different MI tasks. These
features can have more discrimination information than the
edges which have no change among different MI tasks.
The primary novelty of the proposed CBN is a spatio-
temporal statistical information extraction method. First, we
use GMM to calculate temporal statistical information of MI
intrachannel EEG data. Second, the spatial statistical infor-
mation of MI interchannel EEG data is extracted through the
inference probability of constructed common edges in BN.
Therefore, according to statistic theory, if we have enough
data, we can analyze MI with high performance that was not
possible before.
The organization of this paper is as follows. Section II
introduces some basic BN theory and then describes the pro-
posed CBN; experimental results are reported in Section III
and conclusions are drawn in Section IV.
II. C
OMMON BAYESIAN NETWORK
A. Preliminary of Bayesian Network
A BN is represented by a directed acyclic graph. Let
X = (x
1
, x
2
,...,x
n
) be a collection of random variables.
A BN over X is specified by a pair (G;P), where G = (V;E)
is graph structure with node set V = (v
1
, v
2
,...) and edge
set E = (e
1
, e
2
,...). If there is an arc from v
i
to v
j
, i.e.,
(v
i
, v
j
) = e
k
∈ E, we say that v
i
is a parent of v
j
and v
j
is a
child of v
i
. P is the joint distribution. G satisfies the follow-
ing two conditions: 1) node v
i
corresponds to variable x
i
and
2) every variable is conditionally independent of its nonde-
scendants given its parents, i.e., p(x
i
|x
j
, x
k
) = p(x
i
|x
j
) if node
x
k
is node x
j
’s parent.
The learning task in BN can be separated into two subtasks:
structure learning and parameter estimation. The former aims
to identify the most suitable topology and implies a set of con-
ditional independence relations among the variables involved
as long as they are valid. In particular, the graph structure con-
strains the conditional independencies among those variables.
Given a certain causal structure, only some patterns of condi-
tional independence are expected to occur generically among
the variables. Besides independencies, the BN structure can
also be used in certain domains to represent cause and effect
relationships through the edges and their directions. In these
cases, the parent of a node is taken to be the directed cause of
the quantity represented by that node. The parameters define
the conditional probability distributions for a given network
topology. They need to be estimated as accurately as possible.
Existing structure learning approaches follow two basic
strategies: they either look over structures that maximize the
likelihood of the observed data (score-based methods), or they
test for conditional independencies and use these to constrain
the space of possible structures. The former starts by defining a
statistically motivated score that describes the fitness of each
possible structure to the observed data. Such scores include
Bayesian scores [32], [33] and minimum description length
scores [34]. The latter tries to estimate properties of condi-
tional independence among the attributes in the data. This is
usually done via a statistical hypothesis test, e.g., χ
2
test.
In general, finding a structure that maximizes the score
is known as an NP-hard problem [35]–[37]. Although the
constraint satisfaction approach is efficient, it is sensitive to
independence tests. It is commonly believed that an opti-
mization approach is a better tool for structure learning from
data. Most existing learning tools apply such standard heuris-
tic search techniques as greedy hill-climbing and simulated
annealing to find high-scoring structures [33], [38], [39].
Recently, new methods are proposed by formulating a struc-
ture learning problem as an integer linear program and solving
it via a branch-and-cut method [40], [41].
As EEG signals are collected from several channels in dif-
ferent brain areas under a given cognition task, studies on
brain cognition have shown that every cognition task is com-
pleted via the collaboration of many if not all brain areas under
some definite cognition law [42]. It is also shown that different
cognition tasks have different cognition functions which lead
剩余11页未读,继续阅读
2842 浏览量
108 浏览量
106 浏览量
2021-02-10 上传
2021-03-24 上传
101 浏览量
303 浏览量

weixin_38665804
- 粉丝: 11
- 资源: 942
 我的内容管理
展开
我的内容管理
展开







