TLD-FB特征点选择法:提升视频追踪稳定性的关键
需积分: 9 194 浏览量
更新于2024-09-10
收藏 981KB PDF 举报
TLD-FB特征点选择法是一种在追踪算法中广泛应用的技术,特别是在TLD(Temporal Linking and Detection)算法中。TLD是一种基于光流的视觉对象追踪方法,它采用了金字塔LK光流技术来计算连续帧之间的运动估计。在这个过程中,关键的一步是特征点的选择,而TLD算法中的亮点在于利用了Forward-Backward Error (FBE)策略。
Forward-Backward Error 方法的核心思想是双向跟踪:首先,从当前帧开始向前预测目标点的位置,然后反向回溯验证预测结果。这样做的目的是通过比较前后两次追踪的结果,检测是否存在显著的不一致,即所谓的“跟踪失败”。如果检测到这种差异,那么就可能意味着特征点选取或追踪过程出现了问题。
这种方法的优势在于它不仅依赖于单向的匹配,而是结合了时间上的前后一致性,这使得它在处理非rigid(非刚体)对象和复杂场景时更具鲁棒性。传统的跟踪方法,如常用的Normalized Cross-Correlation (NCC)(归一化互相关),虽然在很多情况下表现良好,但在处理快速运动、遮挡或形状变化等情况时可能会失效,而FBE则提供了一种额外的检测手段。
通过FBE,TLD算法能够有效地检测并剔除那些导致跟踪失败的不可靠特征点,从而选择出更为稳定的轨迹。此外,基于这种错误检测,作者们提出了一个名为Median Flow的新型对象追踪器。Median Flow利用了FBE带来的可靠性信息,通过中位数滤波等技术,进一步提高了追踪性能,即使在具有挑战性的视频序列中也能达到最先进的水平。
总结来说,TLD-FB特征点选择法在视觉追踪中引入了一种创新的错误检测机制,它通过结合前向和后向的追踪,增强了对跟踪可靠性的评估,并且与传统的NCC方法形成互补,尤其在处理复杂动态场景时展现出卓越的效果。这种技术的采用,不仅提升了追踪精度,还优化了整体系统的稳定性和鲁棒性。
Forward-Backward Error: Automatic Detection of Tracking Failures
Zdenek Kalal
CVSSP, UK
z.kalal@surrey.ac.uk
Krystian Mikolajczyk
CVSSP, UK
k.mikolajczyk@surrey.ac.uk
Jiri Matas
CMP, Czech Republic
matas@cmp.felk.cvut.cz
Abstract
This paper proposes a novel method for tracking fail-
ure detection. The detection is based on the Forward-
Backward error, i.e. the tracking is performed forward
and backward in time and the discrepancies between
these two trajectories are measured. We demonstrate
that the proposed error enables reliable detection of
tracking failures and selection of reliable trajectories
in video sequences. We demonstrate that the approach
is complementary to commonly used normalized cross-
correlation (NCC). Based on the error, we propose a
novel object tracker called Median Flow. State-of-the-
art performance is achieved on challenging benchmark
video sequences which include non-rigid objects.
1. Introduction
Point tracking is a common computer vision task:
given a point location in time t, the goal is to estimate its
location in time t + 1. In practice, tracking often faces
with a problem where the points dramatically change
appearance or disappear from the camera view. Under
such conditions, tracking often results in failures. We
study the problem of failure detection and propose a
novel method that enables any tracker to self-evaluate
its reliability.
The proposed method is based on so called forward-
backward consistency assumption that correct tracking
should be independent of the direction of time-flow. Al-
gorithmically, the assumption is exploited as follows.
First, a tracker produces a trajectory by tracking the
point forward in time. Second, the point location in the
last frame initializes a validation trajectory. The vali-
dation trajectory is obtained by backward tracking from
the last frame to the first one. Third, the two trajectories
are compared and if they differ significantly, the for-
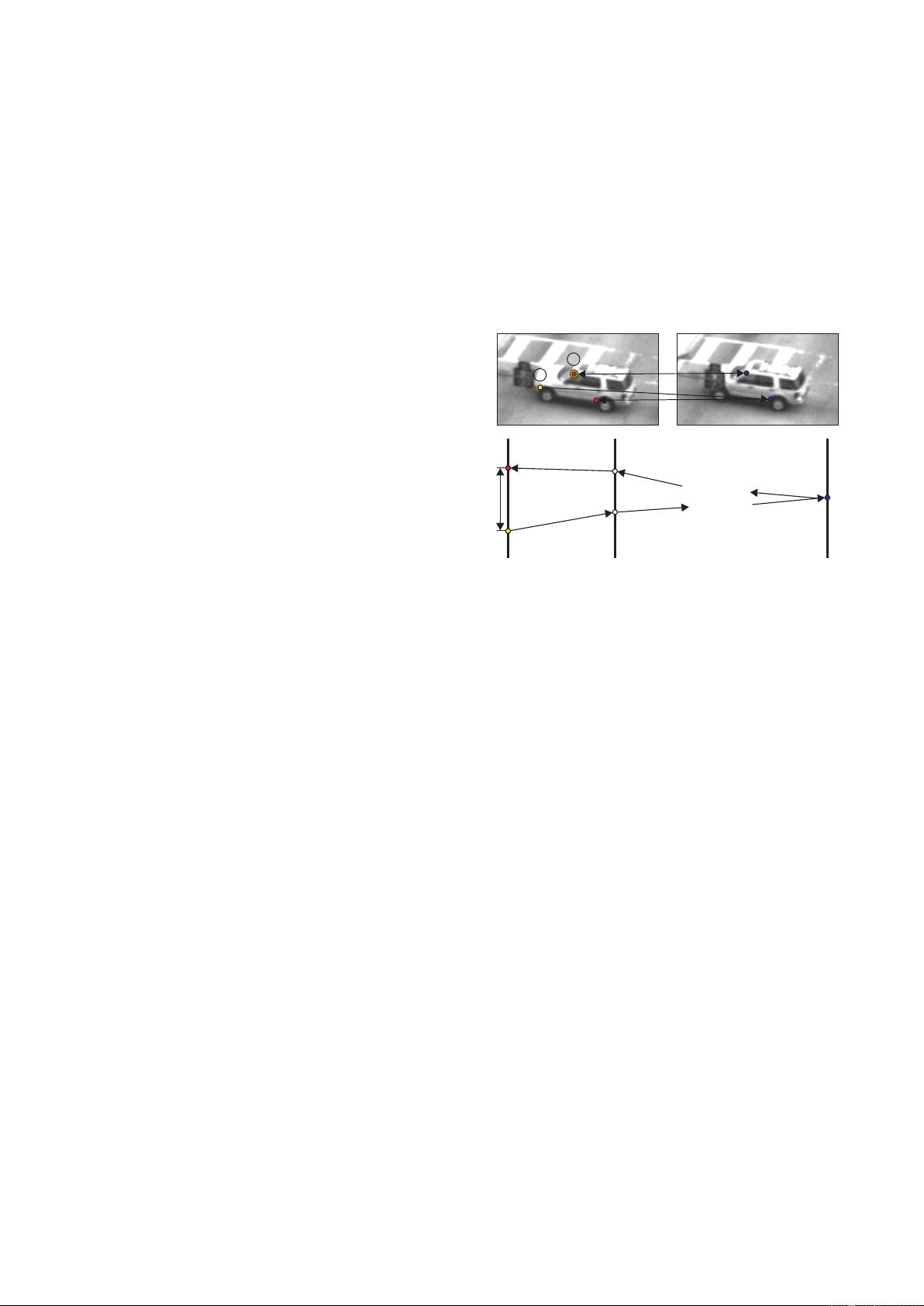
ward trajectory is considered as incorrect. Fig. 1 (top)
illustrates the method when tracking a point between
two images (basic trajectory). Point no. 1 is visible in
both images and the tracker is able to localize it cor-
I
t
I
t+k
^
x
t
x
t
backward trajectory
forward trajectory
I
t+1
. . .
x
t+1
forward-backward
error
x
t+k
2
1
^
x
t+1
Figure 1. The Forward-Backward error penalizes in-
consistent trajectories. Point 1 is visible in both im-
ages, tracker works consistently forward and back-
ward. Point 2 is occluded in the second image, for-
ward and backward trajectories are inconsistent.
rectly. Tracking this point forward or backward results
in identical trajectories. On the other hand, point no.
2 is not visible in the right image and the tracker lo-
calizes a different point. Tracking this point backward
ends in a different location then the original one. The
inconsistency can be easily identified and as we show
in the experimental section, it is highly correlated with
real tracking failures.
A commonly used approach to detect tracking fail-
ures is to describe the tracked point by a surrounding
patch R which is compared from time t to t + 1 us-
ing sum-of-square differences (SSD) [3, 9]. This differ-
ential error enables detection of failures caused by oc-
clusion or rapid movements, but does not detect slowly
drifting trajectories. The detection of a drift can be ap-
proached by defining an absolute error, such as a com-
parison between the current patch and affine warps of
the initial appearance [11]. This method is applicable
only to planar targets. Recently, a general method for
assessing the tracking performance was proposed [13],
which is based on a similar idea to the one explored in
International Conference on Pattern Recognition, 23-26 August, 2010, Istambul, Turkey
下载后可阅读完整内容,剩余3页未读,立即下载
2017-11-08 上传
2019-08-29 上传
2012-11-23 上传
2015-04-15 上传
2021-02-17 上传
2022-05-11 上传

wangjiemei22
- 粉丝: 0
- 资源: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- 正整数数组验证库:确保值符合正整数规则
- 系统移植工具集:镜像、工具链及其他必备软件包
- 掌握JavaScript加密技术:客户端加密核心要点
- AWS环境下Java应用的构建与优化指南
- Grav插件动态调整上传图像大小提高性能
- InversifyJS示例应用:演示OOP与依赖注入
- Laravel与Workerman构建PHP WebSocket即时通讯解决方案
- 前端开发利器:SPRjs快速粘合JavaScript文件脚本
- Windows平台RNNoise演示及编译方法说明
- GitHub Action实现站点自动化部署到网格环境
- Delphi实现磁盘容量检测与柱状图展示
- 亲测可用的简易微信抽奖小程序源码分享
- 如何利用JD抢单助手提升秒杀成功率
- 快速部署WordPress:使用Docker和generator-docker-wordpress
- 探索多功能计算器:日志记录与数据转换能力
- WearableSensing: 使用Java连接Zephyr Bioharness数据到服务器
