汽车主动悬架控制策略对比分析:模糊、最优与模糊PID
需积分: 25 85 浏览量
更新于2024-08-12
1
收藏 272KB PDF 举报
"本文对比研究了汽车主动悬架的几种控制策略,包括模糊控制、最优控制和模糊PID控制,通过二自由度模型与被动悬架进行仿真对比,分析了车身加速度、悬架动挠度和轮胎动荷载等关键性能指标。"
在汽车工程领域,主动悬架系统是一种高级的技术,它可以动态调节车辆悬架的性能,以改善行驶舒适性和操控稳定性。本文主要关注的是主动悬架系统的控制策略,尤其是针对2006年的研究背景,探讨了三种主流的控制方法。
首先,模糊控制是一种基于模糊逻辑的控制策略,它能够处理不确定性和非线性问题。在主动悬架系统中,模糊控制可以依据车辆状态(如路面不平度)和驾驶员的驾驶习惯,灵活调整悬架的响应,提高车辆的行驶平顺性。然而,模糊控制的规则库需要预先设定,对于复杂的路况适应性可能有限。
其次,最优控制是通过优化算法寻找最佳控制输入,以最小化或最大化某个性能指标。在主动悬架系统中,最优控制通常用于最小化车身振动和轮胎动荷载,以达到最佳的舒适性和操控性平衡。然而,最优控制的计算量较大,实时性可能成为其应用的一个挑战。
再者,模糊PID控制是将传统的PID控制与模糊逻辑相结合,既保留了PID控制器的稳定性和实时性,又引入了模糊逻辑的自适应能力。在主动悬架中,模糊PID可以动态调整PID参数,更好地适应不同的驾驶条件。尽管如此,模糊PID控制的参数整定仍然需要经验和试验,可能影响其性能表现。
通过Matlab仿真,作者对比了这三种控制策略在主动悬架系统中的实际效果,对车身加速度、悬架动挠度和轮胎动荷载这三个关键性能指标进行了评估。结果表明,每种控制策略都有其独特优势,例如模糊控制的灵活性,最优控制的性能优化,以及模糊PID的综合适应性。但同时,每种策略也存在不足,如模糊控制的规则设定复杂性,最优控制的计算需求,以及模糊PID的参数整定问题。
该研究为汽车主动悬架系统的控制策略提供了深入的理论分析和实践对比,对于进一步优化主动悬架设计和提升汽车性能具有重要的参考价值。这些控制策略的选择和改进将继续推动汽车行业的技术进步,特别是在自动驾驶和智能交通系统中,主动悬架的性能将直接影响到车辆的安全性和乘客的舒适体验。
维普资讯 http://www.cqvip.com
第
25
卷第
6
期
2006
年
6
月
机械科学与技术
MECHANICAL
SCIENCE
AND
TECHNOLOGY
Vo
l.
25
No.6
June 2006
ph
文章编号:
1003-8728
(2006)
06
-0
647-04
汽车主动悬架几种控制策略的比较研究
重一黠
冀杰,李以农,郑玲,罗铭则
(重庆大学机械传动国家重点实验室,重庆
400044)
冀杰
摘
要:根据汽车二自由度主动悬架模型,结合振动控制的理论和技术,着重研究了被广泛应用的模糊控制、最优控
制和模糊
PID
控制,并利用
Matlab
进行仿真,与被动悬架进行了比较。对车身加速度、悬架动挠度和轮胎动荷载
3
个性能指标进行了评价,不仅讨论了上述
3
种控制方法用于主动控制的优点,还指出了这些控制策略存在的不足。
关键词:主动悬架;模糊控制;最优控制;模糊
PID
控制
中图分类号
:U46
文献标识码
:A
Comparative
Study
of
Control
Strategies
for
Active
Suspensions
Ji Jie ,
Li
Yinong , Zheng Ling , Luo Minggang
(State
Key
Laboratory of Mechanical Transmission , Chongqing University ,
Cho
吨
qing
400044 )
Abstract:
This
paper
established a two-degree-of-freedom model for automobiles I active suspensions , with
emphasis laid on the widely applied fuzzy logic control
, optimal control and fuzzy PID control and in com-
bination with vibration control theory and technique. The active suspensions are compared with the tradi-
tional passive suspensions. At the same time
, both the advantages of the above three control methods and
their disadvantages for active control are discussed.
Key
words:
active suspension; fuzzy logic control; optimal control; fuzzy PID control
悬架系统是汽车的重要装置之一,它影响着车辆行驶
的平顺性和稳定性。性能优越的悬挂系统,是车辆在不同
地形条件下具有快速机动性和良好舒适性的重要保证。传
统的地面车辆,普遍采用被动悬挂系统,这种悬挂系统只能
被动地存储和吸收外界能量,不能主动适应车辆行驶状况
和外界激励的变化,大大制约了车辆性能的进一步改善。
而主动悬架采用有源或无源可控元件组成一个闭环或开环
的控制系统,根据车辆系统的运动状态和外部输入的变化
(路面激励或驾驶员方向盘操作)做出反应,主动地调整和
产生所需的控制力,使悬架始终处于最佳减振状态,能大大
改善车辆的乘坐性能和操纵性能,引起了国内外的研究和
重视
[1
,
2J
。
主动悬架需要有控制策略来使悬架实现需要的性能,
但是由于路面不平度的随机性,在许多情况下车辆悬架系
统有着复杂的结构和工作过程的复杂性,如存在非线性和
不确定性,要建立一个精确的地面车辆模型很困难。目前
人们已提出许多控制方法
[3
刑,每种方法均有其各自的优
缺点和适应性。本文以两自由度汽车四分之一模型作为研
收稿日期
:2005
一
06-03
作者简介:冀杰
(1982
- )
,男(汉)
,山东,硕士研究生
E-mail
:j
ijiess@163.com
究基础,采用模糊控制、最优控制及其模糊自适应
PID
控制
对悬架控制系统进行控制,并进行了性能仿真
[7J
。在
B
级
路面的激励信号下,对这
3
种控制策略下的主动悬架与被
动悬架的工作情况进行了比较,分析了这
3
种控制策略在
主动悬架中应用的优缺点。
1
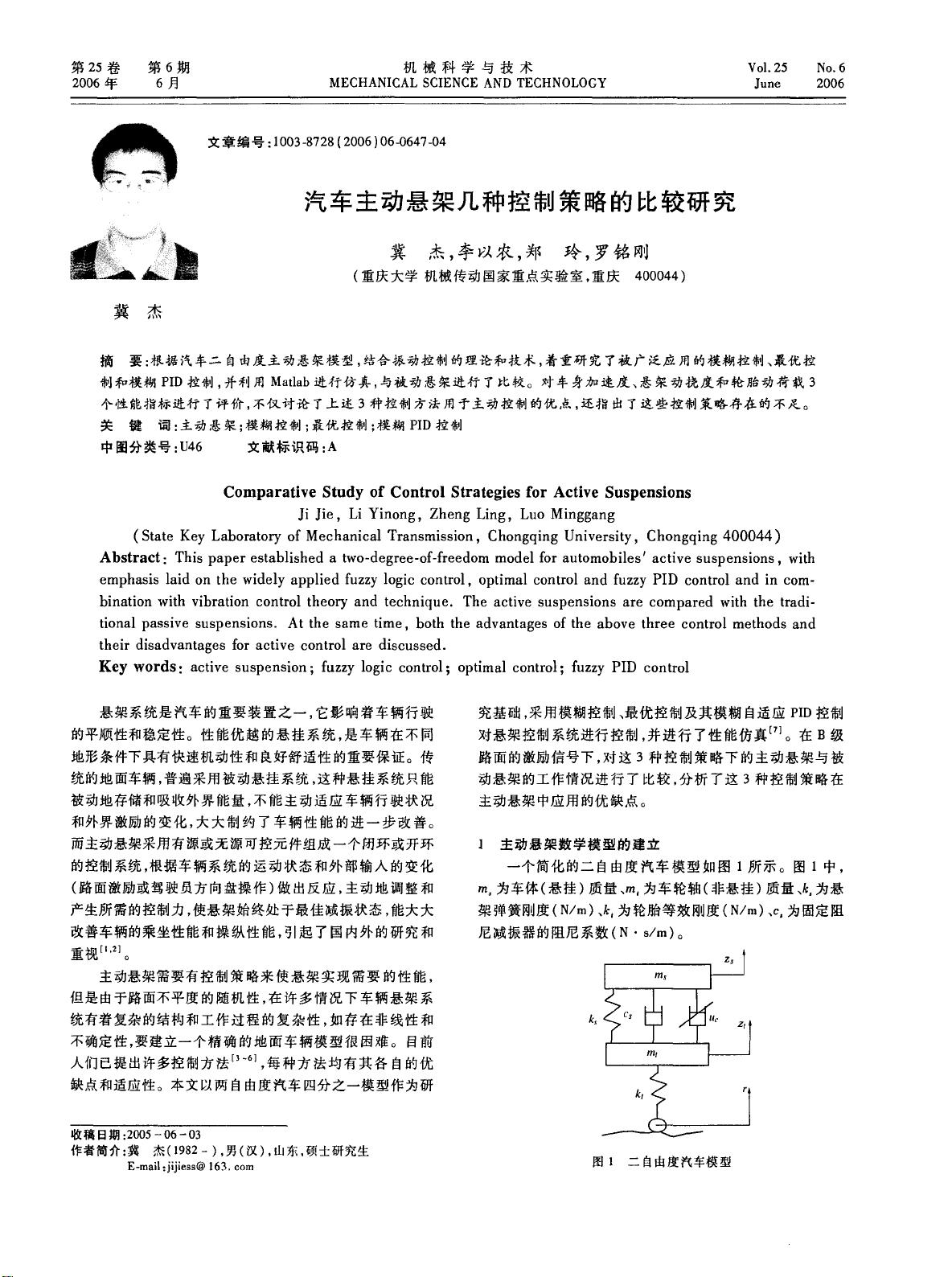
主动悬架数学模型的建立
一个简化的二自由度汽车模型如图
l
所示。图
l
中,
m
,
为车体(悬挂)质量、
m
,
为车轮轴(非悬挂)质量扎为悬
架弹簧刚度
(
N/m)
、
k
,
为轮胎等效刚度
(N/m)
、
C
,为固定阻
尼减振器的阻尼系数
(N.
s/m)
。
k"
图
l
二自由度汽车模型
下载后可阅读完整内容,剩余3页未读,立即下载
2021-05-04 上传
2022-07-15 上传
2021-06-26 上传
2021-05-08 上传
2021-05-11 上传
2020-01-11 上传

weixin_38607479
- 粉丝: 3
- 资源: 965
 我的内容管理
展开
我的内容管理
展开







最新资源
- WPF渲染层字符绘制原理探究及源代码解析
- 海康精简版监控软件:iVMS4200Lite版发布
- 自动化脚本在lspci-TV的应用介绍
- Chrome 81版本稳定版及匹配的chromedriver下载
- 深入解析Python推荐引擎与自然语言处理
- MATLAB数学建模算法程序包及案例数据
- Springboot人力资源管理系统:设计与功能
- STM32F4系列微控制器开发全面参考指南
- Python实现人脸识别的机器学习流程
- 基于STM32F103C8T6的HLW8032电量采集与解析方案
- Node.js高效MySQL驱动程序:mysqljs/mysql特性和配置
- 基于Python和大数据技术的电影推荐系统设计与实现
- 为ripro主题添加Live2D看板娘的后端资源教程
- 2022版PowerToys Everything插件升级,稳定运行无报错
- Map简易斗地主游戏实现方法介绍
- SJTU ICS Lab6 实验报告解析
