垂直双相机模型在微动平台位姿修正中的应用
版权申诉
180 浏览量
更新于2024-06-27
收藏 1.89MB DOCX 举报
"该文档研究了一种基于垂直双相机的微动平台位姿修正方法,旨在解决监测系统在长期工作中因平台自身微小晃动导致的测量误差问题。通过构建垂直双相机模型并利用垂直固连约束关系,可以线性求解相机6-DOF(六个自由度)的微小变化,从而提高位姿估算的精度、鲁棒性和效率。在仿真和室外实验中,该方法均表现出优于单目PnP算法的性能,能更有效地补偿平台微小运动引起的测量误差,降低了测量误差的平均值。"
本文主要探讨的是在基于视觉的监测系统中,如何精确地修正由于平台微小晃动带来的测量误差。在长时间户外工作的监测系统中,平台自身的6-DOF微动会显著影响测量的准确性。为了解决这一问题,研究者提出了一个创新的解决方案,即采用垂直双相机模型。这种模型的两个相机互相垂直,且保持固定连接,这样可以通过分析它们之间的约束关系来线性估算相机的微小位姿变化。
传统的位姿估计算法,如单目透视n点(PnP)算法,可能在处理微小位姿变化时存在局限性。相比之下,提出的线性解算方法在以下三个方面表现出优势:首先,它在解算精度上有所提升,能够准确估计出相机的微小旋转(欧拉角)和平移;其次,该方法更具有鲁棒性,即使在相机有微小位移的情况下也能稳定工作;最后,计算效率更高,适合实时或快速的数据处理需求。
为了验证这种方法的有效性,进行了仿真实验和实际室外实验。在仿真实验中,相机的欧拉角变化不超过30',平移向量不超过10mm时,所提方法的表现优于标准的PnP算法。而在室外实验中,当监测44米远处目标点的沉降时,利用该方法修正平台位姿后,绝对测量误差的平均值降低到0.2mm,这显著优于仅使用单目PnP算法的结果,充分证明了该方法在实际应用中的实用价值。
这篇文档提出的基于垂直双相机的位姿修正方法为解决监测系统中的微动误差问题提供了新的思路,其高精度、高鲁棒性和高效计算特性使其在监测技术领域具有广阔的应用前景。未来的研究可能会进一步优化这一方法,以适应更多复杂环境和更严格的精度要求。
式中:λ
i
为深度因子; Pt0iPit0 是控制点在 T
0
时刻的相机坐标系下的三维坐标; u~t1iu~it1 是
T
1
时刻控制点所对应的齐次像素坐标;R 和 t 分别是相机从 T
0
时刻到 T
1
时刻发生的旋转变
化和平移变化,R∈SO(3),t∈R
3×1
;矩阵 K 是相机内参矩阵,有
K=⎡⎣⎢fx000fy0u0v01⎤⎦⎥,(2)K=fx0u00fyv0001,(2)
式中,f
x
和 f
y
是等效焦距,(u
0
,v
0
)是相机的主点坐标。用欧拉角表示旋转,对应的旋转角分别是
俯仰角 α,偏航角 β,以及滚转角 γ,则相应的旋转矩阵和平移矢量分别为
R=⎡⎣⎢cosγ−sinγ0sinγcosγ0001⎤⎦⎥⎡⎣⎢cosβ0sinβ010−sinβ0cosβ⎤⎦⎥⎡⎣⎢1000cosα−s
inα0sinαcosα⎤⎦⎥,(3)t=[tx,ty,tz]T
。
(4)R=cosγsinγ0-sinγcosγ0001cosβ0-
sinβ010sinβ0cosβ1000cosαsinα0-sinαcosα,(3)t=[tx,ty,tz]T。(4)
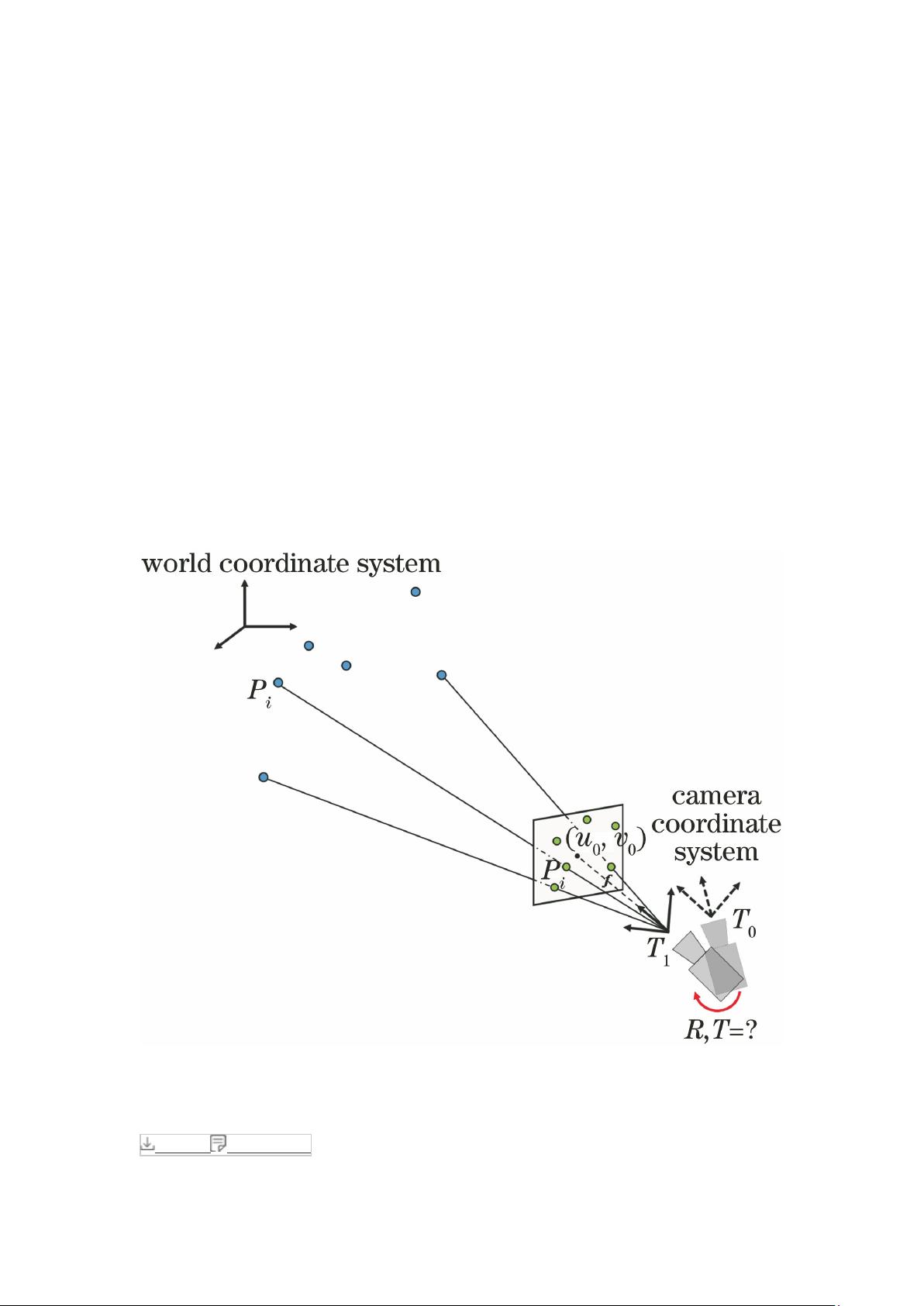
所谓相机位姿变化求解问题就是已知相机内参矩阵,利用控制点在 T
0
时刻相机坐标系下的
坐标 Pt0iPit0= [xt0i,yt0i,zt0i]T[xit0,yit0,zit0]T 和 T
1
时刻所对应的图像坐标点
ut1iuit1= [ut1i,vt1i]T[uit1,vit1]T,i=1,2,3,…,n,计算出相机的相对位姿变化量 R 和 t。
图 1. 基于 PnP 的相机位姿变化示意图
Fig. 1. Schematic of camera pose variation based on PnP
下载图片 查看所有图片
3 基于双正交相机的微动平台位姿修正方法与原理
剩余14页未读,继续阅读
126 浏览量
2022-12-15 上传
2022-12-01 上传
2023-02-23 上传
2023-02-23 上传

罗伯特之技术屋
- 粉丝: 4513
- 资源: 1万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 金色农业农场公司网站模板
- ELT2023-12-5最新版本,v3.2344.0
- 中转方案最优遗传算法.zip
- 电话销售时如何找到拿主意的人
- FSL_project
- Test builds-开源
- draft-rpki-checklists
- Qt信号槽中的信号传递对比
- 移动:Loop的React Native应用
- WumpusHunters:StackExchange Codegolf 上 Wumpus 狩猎山王的源代码
- Meta pkg-开源
- Web-Scraping
- Consul1.17版本
- 营销管理理论与实践PPT
- Project2-2_G9:DKE 9组项目存储库
- git原理详解及实用指南-每章独立.rar
