探索CAN协议:汽车电子控制的基础
需积分: 47 102 浏览量
更新于2024-07-31
2
收藏 1.83MB PDF 举报
"整车通讯协议基础学习"是一份关于CAN(Controller Area Network)协议的基础培训资料,由北京恒润科技有限公司提供,该公司网址为<http://www.hirain.com>。CAN最初由德国Bosch公司在20世纪80年代开发,旨在解决现代汽车中众多控制单元之间实时数据交换的问题,例如引擎控制、悬挂系统、ABS/ASR、传动控制等关键系统的通信需求。
主要内容分为以下几个部分:
1. CAN总线标准:这部分介绍了CAN协议的基本概念,包括它在汽车行业中扮演的角色,以及其作为实时、高效通信协议的优势。CAN总线允许不同速度和带宽级别的连接,如高速CAN和低速容错CAN,以适应汽车内部各种设备的需求。
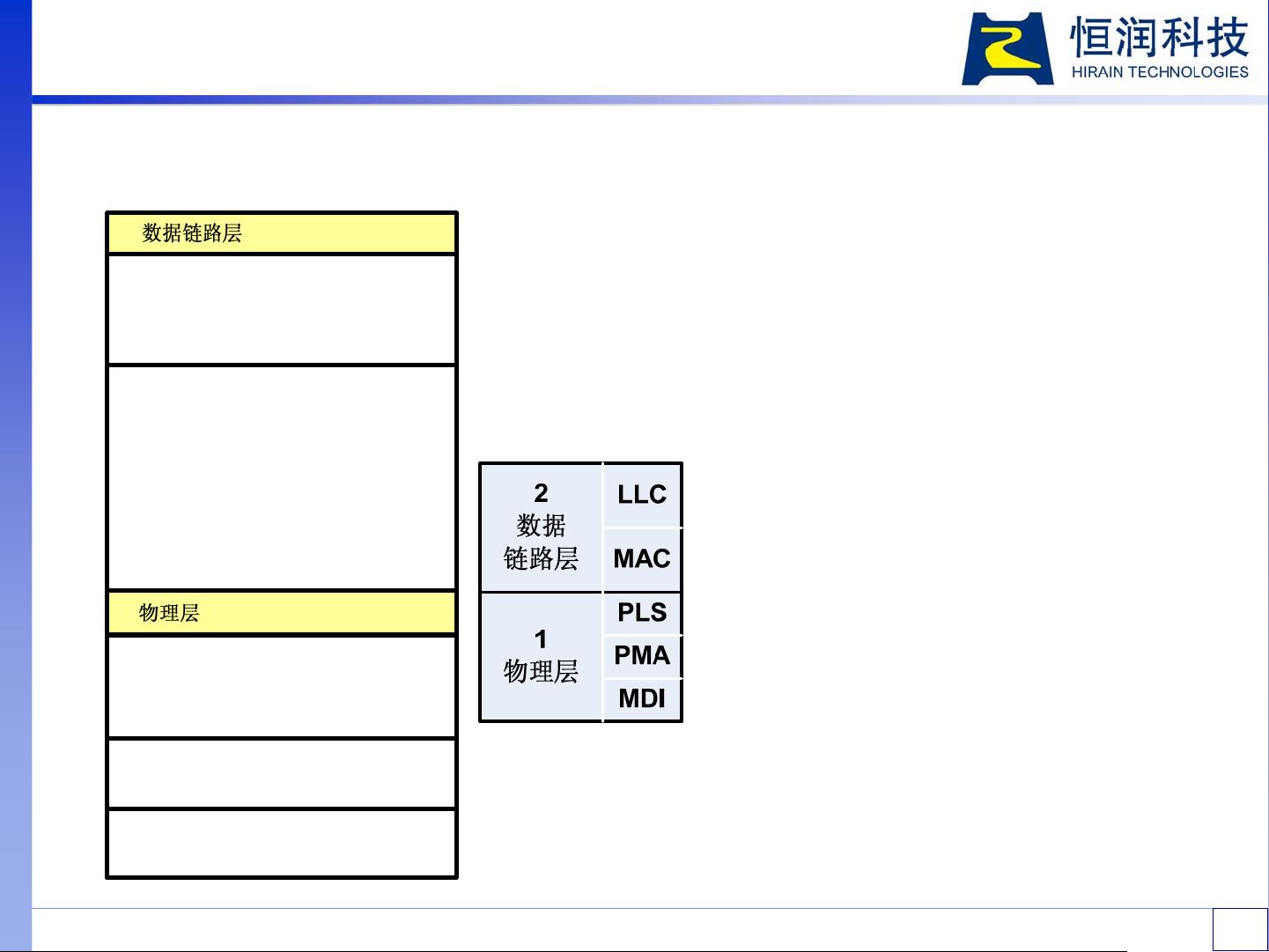
2. 数据链路层:这部分详细探讨了CAN的数据传输机制,包括数据帧的设计、发送和接收过程。数据帧是CAN协议中的基本单元,用于承载信息,它包含标识符、数据段、远程帧标志、循环冗余检验(CRC)等内容,确保数据的可靠传输。
3. 错误检测:CAN协议强调错误检测和处理能力,通过错误帧和仲裁机制来确保数据的正确性和一致性,即使在网络中有干扰或冲突也能快速恢复。
4. 帧格式与位定时与同步:这部分深入讲解了CAN帧的结构,包括起始位、同步位、数据位、偶校验位和停止位,以及如何保持精确的位定时,这对于保证数据传输的准确无误至关重要。
5. 物理层:讲解了CAN的硬件实现,包括电缆类型、终端电阻、电压等级等,这些都是构建实际CAN网络的基础要素。
6. 汽车的CAN网络应用:展示了CAN协议在现代汽车各个子系统中的广泛应用,如动力系统控制、车身控制、仪表板显示、门控、安全系统等,体现了CAN协议在复杂汽车电子系统中的集成性和灵活性。
这份文档是对CAN协议入门者的实用指南,涵盖了从CAN的起源、工作原理到实际应用的全面介绍,有助于理解这一在汽车行业广泛应用的关键技术。通过学习,读者可以掌握如何设计、实现和维护一个高效的汽车通信网络。
北京经纬恒润科技有限公司 http://www.hirain.com
16
CAN总线标准
底层标准
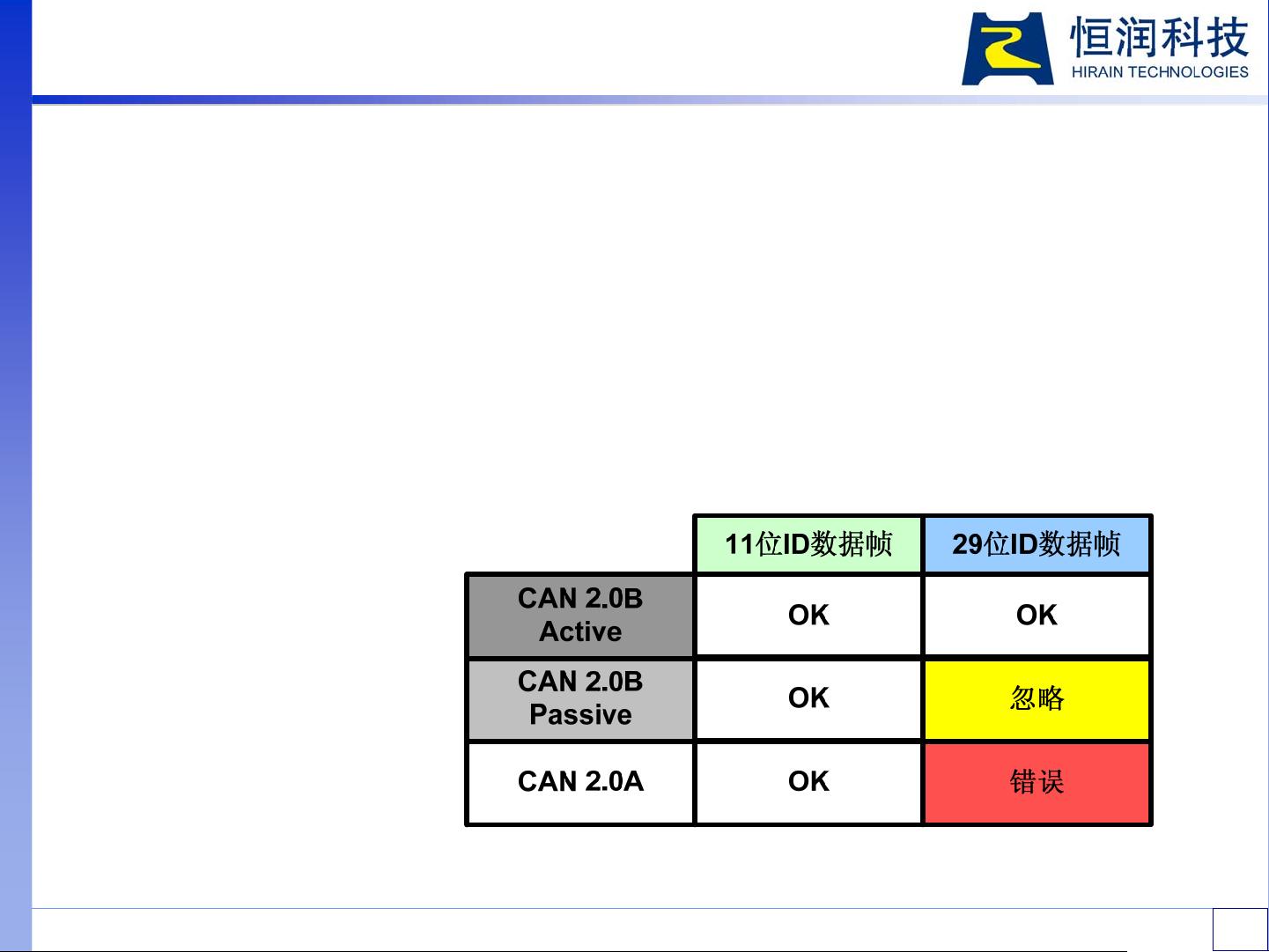
CAN2.0
2.0A -- 将29位ID视为错误
2.0B Passive -- 仅识别11位ID数据帧
2.0B Active -- 可识别11位和29位两种ID数据帧

剩余102页未读,继续阅读
2019-09-14 上传
2020-05-27 上传
2021-10-01 上传
2023-10-16 上传
2020-01-02 上传
519 浏览量
2021-06-05 上传
2024-07-20 上传

waynehill331
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- FindSport2Play:这是一个MERN Stack应用程序,玩家可以在其中举办活动,其他玩家可以参加并聚会以一起参加任何体育运动
- Microblaze-USB104A7_Video:USB104A7上的图像处理pipeleine
- fe-2006
- 合并多个Excel文件.zip易语言项目例子源码下载
- 多维度揭示心力衰竭患者生存关键因素(代码+数据)
- 模板工程.zip
- retro-board
- sharply:块状C#编辑器
- Java-Application-using-Spatial-Database:数据库系统
- Olimex-ESP32-POE-example:Olimex存储库中缺少的此示例程序提供了一个使用ESP-IDF 4.1及更高版本(初始化以太网子系统)的简单示例。 ESP-IDF 4.1有许多重大更改,因此一个有效的示例非常重要
- rfid的应用场景.zip
- regalstaket-mobler
- auth-boilerplate-with-redux
- sax:用于XML和HTML的sax-js sax样式解析器的维护分支
- FM-Intro-Component:使用CSS Grid,Flexbox和JavaScript表单验证的前端向导挑战
- 旅游及票务网站模版
