MELSEC-Q/L定位模块FB库参考手册:QD75 & LD75功能详解
"QD75 LD75 定位模块的功能块说明手册详细介绍了用于MELSEC-Q/L系列的定位模块的FB库,包括多种型号如QD75P和QD75D系列以及LD75系列的设置和控制方法。手册涵盖了从基本参数到详细参数的设定,原点复归,定位数据设置,以及各种运行模式如JOG、MPG、速度变更、加减速时间调整、位置变更等操作。此外,还包括错误处理、参数初始化和快闪ROM写入等功能,旨在帮助用户有效控制和管理定位模块。"
该手册主要围绕QD75和LD75定位模块的功能块(FB)进行详细阐述,提供了一套完整的控制策略和配置步骤。FB库概要部分介绍了FB库的基本功能和应用场景,例如,这些功能块能够实现精确的定位控制,广泛应用于自动化设备、机械臂、生产线等需要高精度运动控制的领域。
在FB库详细部分,手册逐个解析了各个功能块的作用和用法:
- `M+D75_SetBPARAM1` 和 `M+D75_SetBPARAM2` 用于设置基本参数1和2,这涉及到电机控制的基本设定,如速度、方向、脉冲频率等。
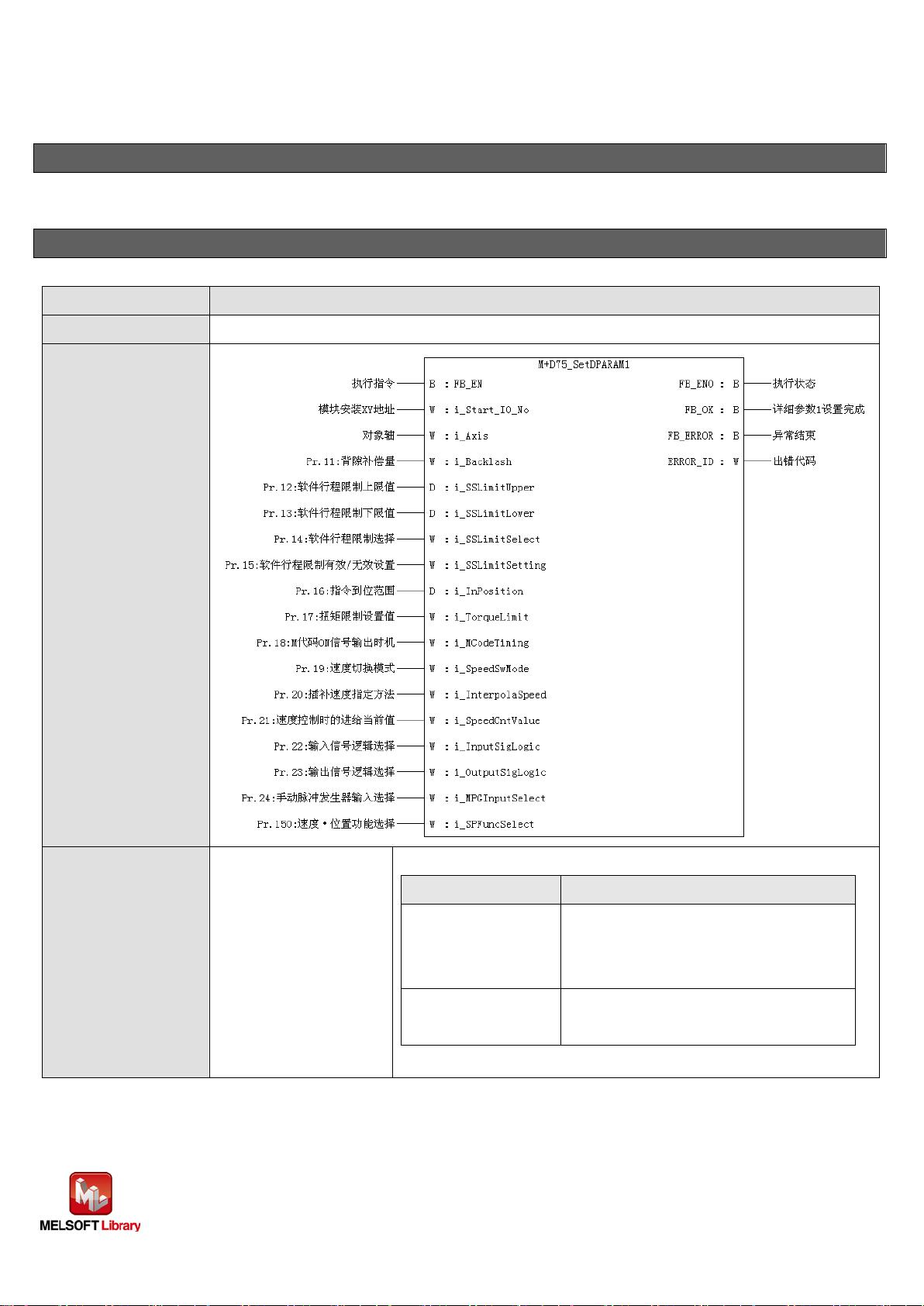
- `M+D75_SetDPARAM1` 和 `M+D75_SetDPARAM2` 则涉及更具体的详细参数,如加减速时间、微动距离等。
- `M+D75_SetZBPARAM` 和 `M+D75_SetZDPARAM` 用于原点复归参数的设定,确保设备能准确回到零点位置。
- `M+D75_PosiDataSet` 用于设置定位数据,设定目标位置和运动方式。
- `M+D75_CPUReady` 信号指示可编程控制器是否准备好执行定位任务。
- `M+D75_StartPosi` 启动定位操作,`M+D75_JOG` 和 `M+D75_MPG` 分别实现JOG运行(自由运行)和手动脉冲发生器运行,允许用户手动控制设备移动。
- `M+D75_ChgSpeed`、`M+D75_ChgOverride`、`M+D75_ChgAccDecTime` 等功能块允许在运行过程中动态改变速度、手动变动和加减速时间。
- `M+D75_ChgPosi` 允许在运行中改变目标位置,提高灵活性。
- `M+D75_Restart` 实现设备的再始动,`M+D75_ErrorOperation` 处理错误情况。
- `M+D75_InitParam` 初始化所有参数,`M+D75_WriteFlash` 将参数写入快闪ROM,确保参数安全保存。
- `M+D75_ABRST` 提供绝对位置恢复功能,帮助设备快速找回精确位置。
通过这些功能块的组合使用,用户可以灵活地编程和控制QD75和LD75定位模块,实现复杂的运动控制任务。手册还包含了系统配置示例和关联手册列表,帮助用户更好地理解和应用这些功能。
FB 的版本升级履历
版本 日期 内容
1.00A 2010/08/06 新建
1.01B 2012/03/26 解决了使用和 FB 内的变址寄存器相同编号的变址寄存
器时有可能发生 OPERATION ERROR(出错代码:4101)的
问题。
备注
本章为说明 FB 功能的资料。
没有记载模块,可编程控制器 CPU 的使用限制事项以及组合注意事项等。
使用本 FB 前,请仔细阅读相关产品的用户手册。
MELSEC-Q/L 定位模块用 FB 库 参考手册
FBM-M083-B
16/146
剩余145页未读,继续阅读
2019-05-31 上传
2016-06-07 上传
2017-11-23 上传
2019-10-10 上传
2018-03-13 上传
2020-04-14 上传

hncsdxw
- 粉丝: 1
- 资源: 15
 我的内容管理
展开
我的内容管理
展开







