指纹图像中基于流场方向的自适应特征提取方法
需积分: 9 155 浏览量
更新于2024-07-19
收藏 1.42MB PDF 举报
本文主要探讨了指纹图像中的自适应流方向基特征提取方法。论文发表在1995年的《Pattern Recognition》期刊,卷28,第11期,页码1657-1672,由Pergamon出版社和Elsevier Science Ltd出版,受Pattern Recognition Society版权保护。该研究专注于将指纹图像视为具有纹理的图像,通过计算指纹的脊线(ridge)方向来提取结构性特征。
首先,作者提出了一种创新的算法,利用流场(orientation flow field)来处理指纹图像。流场是一种表示图像中纹理方向的量,它有助于识别指纹的局部结构。通过计算每个像素点的纹理方向,可以构建一个反映指纹脊线走向的导向图,这在指纹识别和匹配中是非常关键的预处理步骤。
接着,论文提到使用一种基于波形投影的脊线检测算法,该算法能够精确地定位指纹的脊线路径。这种方法能够有效地分离出图像中的实际脊线特征,减少噪声和伪特征的影响。通过这种方法,研究人员能够生成一个更精确的指纹脊线骨架图。
为了进一步提升特征的质量,论文还提到了对骨架图进行形态学操作的处理,如平滑处理,以消除不必要的细节,同时保留主要的指纹特征。这一步骤有助于减少由于图像噪声或边缘效应引起的非真实特征,从而提高特征提取的可靠性。
最后,文章强调了一个重要的后处理阶段,即通过一系列筛选和过滤机制,从检测到的大量 minutiae(指纹细节点)中删除大量的伪特征。这一过程确保了最终提取的特征集具有较高的质量和准确性,这对于指纹识别系统来说至关重要,因为它直接影响到系统的性能和识别率。
这篇论文提出了一个自适应流方向为基础的特征提取流程,包括流场计算、脊线检测、骨架图生成和特征精炼,为指纹图像的自动分析和特征提取提供了一种有效的方法。这一方法对于生物特征识别领域,特别是在指纹识别技术的发展中,具有重要的理论和实践价值。
1660 N.K. RATHA
et al.
ridge~nes
,Y)
X
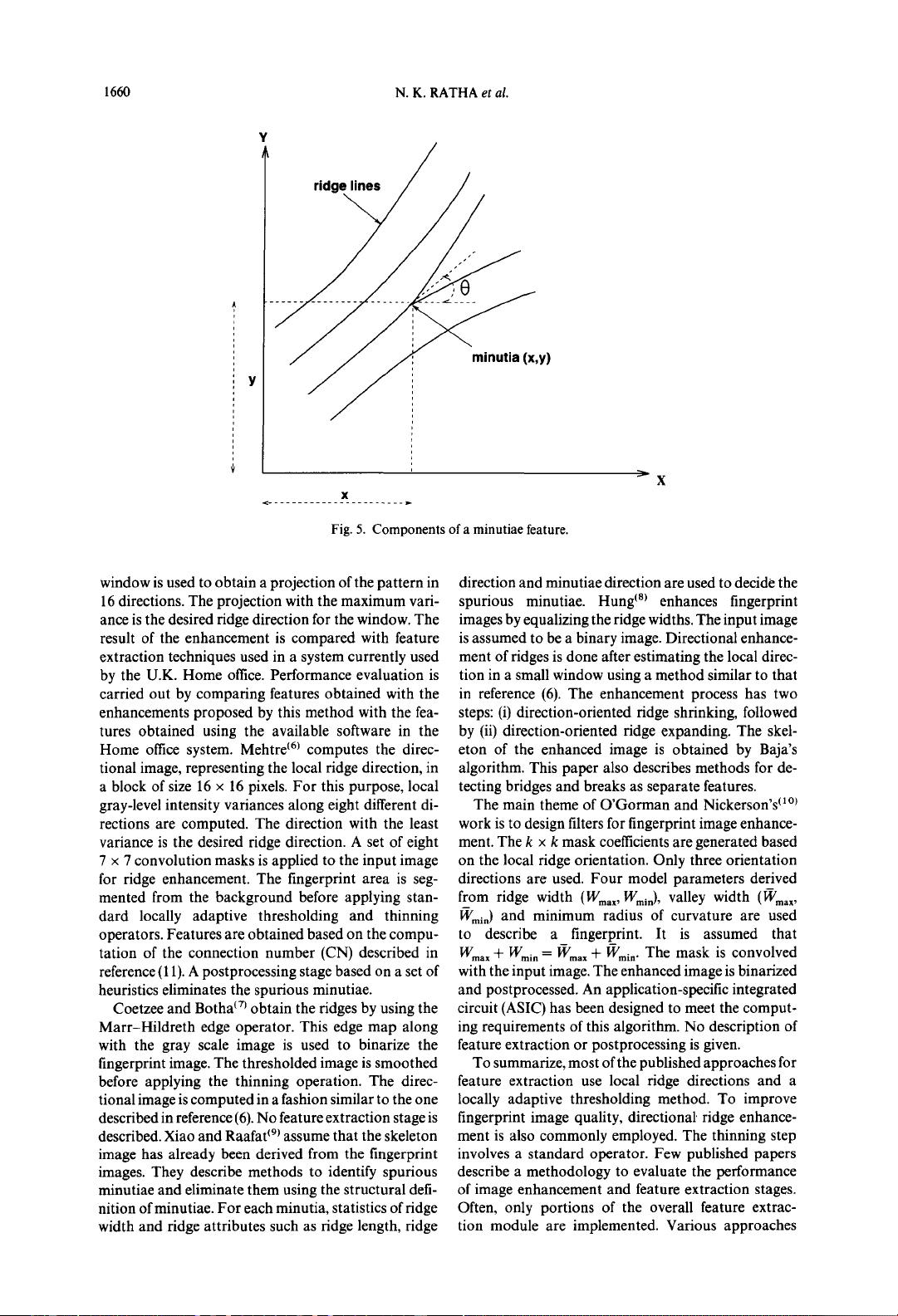
Fig. 5. Components of a minutiae feature.
)-
X
window is used to obtain a projection of the pattern in
16 directions. The projection with the maximum vari-
ance is the desired ridge direction for the window. The
result of the enhancement is compared with feature
extraction techniques used in a system currently used
by the U.K. Home office. Performance evaluation is
carried out by comparing features obtained with the
enhancements proposed by this method with the fea-
tures obtained using the available software in the
Home office system. Mehtre 16) computes the direc-
tional image, representing the local ridge direction, in
a block of size 16 x 16 pixels. For this purpose, local
gray-level intensity variances along eight different di-
rections are computed. The direction with the least
variance is the desired ridge direction. A set of eight
7 x 7 convolution masks is applied to the input image
for ridge enhancement. The fingerprint area is seg-
mented from the background before applying stan-
dard locally adaptive thresholding and thinning
operators. Features are obtained based on the compu-
tation of the connection number (CN) described in
reference (11). A postprocessing stage based on a set of
heuristics eliminates the spurious minutiae.
Coetzee and Botha ~rl obtain the ridges by using the
Marr-Hildreth edge operator. This edge map along
with the gray scale image is used to binarize the
fingerprint image. The thresholded image is smoothed
before applying the thinning operation. The direc-
tional image is computed in a fashion similar to the one
described in reference (6). No feature extraction stage is
described. Xiao and Raafat ~9~ assume that the skeleton
image has already been derived from the fingerprint
images. They describe methods to identify spurious
minutiae and eliminate them using the structural defi-
nition of minutiae. For each minutia, statistics of ridge
width and ridge attributes such as ridge length, ridge
direction and minutiae direction are used to decide the
spurious minutiae. Hung ~8~ enhances fingerprint
images by equalizing the ridge widths. The input image
is assumed to be a binary image. Directional enhance-
ment of ridges is done after estimating the local direc-
tion in a small window using a method similar to that
in reference (6). The enhancement process has two
steps: (i) direction-oriented ridge shrinking, followed
by (ii) direction-oriented ridge expanding. The skel-
eton of the enhanced image is obtained by Baja's
algorithm. This paper also describes methods for de-
tecting bridges and breaks as separate features.
The main theme of O'Gorman and Nickerson's tl°~
work is to design filters for fingerprint image enhance-
ment. The k x k mask coefficients are generated based
on the local ridge orientation. Only three orientation
directions are used. Four model parameters derived
from ridge width (Wmax, Wmi,), valley width (l~ma x,
lg'ml,) and minimum radius of curvature are used
to describe a fingerprint. It is assumed that
Wmax q'- Wrain = ]'~Zmax +
['Vmin" The mask is convolved
with the input image. The enhanced image is binarized
and postprocessed. An application-specific integrated
circuit (ASIC) has been designed to meet the comput-
ing requirements of this algorithm. No description of
feature extraction or postprocessing is given.
To summarize, most of the published approaches for
feature extraction use local ridge directions and a
locally adaptive thresholding method. To improve
fingerprint image quality, directional, ridge enhance-
ment is also commonly employed. The thinning step
involves a standard operator. Few published papers
describe a methodology to evaluate the performance
of image enhancement and feature extraction stages.
Often, only portions of the overall feature extrac-
tion module are implemented. Various approaches
剩余15页未读,继续阅读
125 浏览量
点击了解资源详情
763 浏览量
152 浏览量
155 浏览量
2021-06-22 上传
2021-05-30 上传
2021-02-04 上传
234 浏览量

zhangyu9082
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- 计算机组成原理期末试题及答案(2011参考)
- 均值漂移算法深入解析及实践应用
- 掌握npm与yarn在React和pg库中的使用
- C++开发学生信息管理系统实现多功能查询
- 深入解析SIMATIC NET OPC服务器与PLC的S7连接技术
- 离心式水泵原理与Matlab仿真教程
- 实现JS星级评论打分与滑动提示效果
- VB.NET图书馆管理系统源码及程序发布
- C#实现程序A监控与自动启动机制
- 构建简易Android拨号功能的应用开发教程
- HTML技术在在线杂志中的应用
- 网页开发中的实用树形菜单插件应用
- 高压水清洗技术在储罐维修中的关键应用
- 流量计校正方法及操作指南
- WinCE系统下SD卡磁盘性能测试工具及代码解析
- ASP.NET学生管理系统的源码与数据库教程
