两栖UAV入水滑跳动力学模拟与特性分析
需积分: 5 48 浏览量
更新于2024-08-11
收藏 1.03MB PDF 举报
"裴譞倡等人在2011年的研究主要关注两栖无人机(UAV)的滑跳动力学特性仿真。他们基于空气动力学、势流理论和二元平面滑行理论构建了两栖UAV入水滑跳的动力学模型,深入探讨了不同入水条件对滑跳状态的影响。
1. 动力学模型建立:研究团队采用了空气动力学的基本原理,结合势流理论和二元平面滑行理论,为两栖UAV创建了一个详尽的入水滑跳动力学模型。这个模型旨在模拟和理解无人机在接触水面时的动态行为。
2. 入水瞬间特征:研究表明,当两栖UAV触水时,其姿态会发生显著变化,表现出瞬间的剧烈抬头倾向。这表明在设计时需要特别考虑无人机的稳定性和控制系统的响应能力,以应对这种瞬态的动态负载。
3. 攻角影响:攻角增大导致两栖UAV的沾湿深度增加,同时滑水时间缩短。这意味着攻角的选择对于控制无人机在水面的行为至关重要,过大或过小的攻角都可能导致不良后果。
4. 俯仰角影响:增大入水时的俯仰角会降低沾湿深度,但会延长划水时间。这表明调整俯仰角可以在一定程度上优化无人机的水面滑行性能,但需要找到一个平衡点以确保稳定性和效率。
5. 模型应用:这些研究成果不仅为两栖UAV的总体设计提供了理论基础,而且对飞行控制系统的开发和飞行稳定性评估具有指导意义。在军事上,两栖UAV可以作为高机动性平台用于突防攻击;在民用领域,其高速航行能力和多功能适应性使其优于传统的水上飞机。
6. 研究意义:由于两栖UAV在入水瞬间受到空气动力与水动力的复杂耦合作用,对其滑跳机制进行深入研究有助于解决设计和操作中的关键问题,提升飞行安全性和任务执行效率。
7. 进一步工作:文中虽然没有明确指出,但可以推测未来的研究可能涉及如何优化入水策略,以减少冲击力,改善滑跳性能,并探索更先进的控制算法来适应这种复杂的动力学环境。
总结来说,裴譞倡等人的研究揭示了两栖UAV在滑跳过程中的动力学特性,为这一新型飞行器的设计和控制提供了宝贵的理论依据,也为相关领域的工程实践提供了重要参考。"
收稿日期 :2009‐04‐29 ;修改稿收到日期 :2009‐12‐11畅
作者简介 :裴 譞
倡
(1983‐) ,男 ,博士生
(E‐mail :
p
eixuan‐001@ 163 .com) ;
张宇文(1946‐) ,男 ,教授 .
第28卷第2期
2011 年 4 月
计 算 力 学 学 报
Chinese Journal of Computational Mechanics
Vol .28 ,No .2
April 2011
文章编号 :1007‐4708(2011)02‐0173‐05
两 栖 UAV 滑 跳 动 力 学 特 性 仿 真 研 究
裴 譞
倡 1
, 张宇文
1
, 王银涛
1
, 王志强
2
(1 .西北工业大学 航海学院 ,西安 710072 ;2 .昆明精密机械研究所 ,昆明 650118)
摘 要 :基于空气动力学 、势流理论和二元平面滑行理论 ,建立了两栖 UAV 入水滑跳动力学模型 。 重点对两栖
UAV 入水滑跳动力学特性进行了分析 ,并研究了多种入水条件对滑跳状态的影响 。 结果显示 :(1)两栖 UAV 触
水瞬间 ,姿态出现明显变化 ,UAV 出现瞬时剧烈抬头趋势 ;(2)两栖 UAV 入水攻角增大 ,会造成 UAV 较大的沾
湿深度和较短的滑水时间 ;(3)入水俯仰角增大 ,会减小两栖 UAV 的沾湿深度和增大 UAV 的划水时间 。 研究结
果可以为两栖 UAV 总体设计 、飞行控制系统设计及飞行稳定性评估等方面提供理论依据和研究手段 。
关键词 :两栖 UAV ;动力学建模 ;滑跳状态特性 ;仿真分析
中图分类号 :TJ760畅32 文献标识码 :A
1 引 言
两栖 UAV 是近年来新提出的一种能够在高
海况条件下实现水面待机 、水上高速滑行 、水面起
降
[1]
及近水面滑跳机动飞行
[2]
的新概念飞行器 。
根据概念设计 ,它融合了高速滑行艇和 UAV 的双
重特点 ,具有海空两栖特性 。 两栖 UAV 在军事用
途上相对于常规巡航导弹
[3]
可以作为高机动非常
规弹道 ,实现高效突防攻击 ;在民用用途上相对于
常规水上飞机具有更高的航行速度和更大的功能
适应性 。
由于两栖 UAV 特殊的滑跳飞行过程 ,特别是
入水瞬间 ,受空气动力
[3]
/水动力
[4‐7]
的耦合影响 ,
受力状态相当复杂 ,因此 ,有必要对其入水滑跳机
理进行相关的深入研究 。 本文将根据滑跳阶段的
力学特性建立两栖 UAV 滑跳状态的动力学模型 ,
对滑跳入水周期内的滑跳机理和弹道特性进行相
关分析 ,并对滑跳入水条件对入水滑跳状态的影响
展开研究 。 为两栖 UAV 总体系统设计 、动力学特
性分析及其弹道规划设计提供可以借鉴的方法 。
2 动力学模型
2 .1 入水冲击力模型
关于入水冲击力的理论研究 ,一般忽略流体的
粘 性力及压缩性的影响
[8]
。研究对象以不可压缩
流体的非定常势流理论作为入水冲击力研究的基
础 。
设
矱
为两栖 UAV 击水过程中所形成流场的速
度势函数 ,它应满足拉普拉斯方程 :
楚
2
φ
(x ,
y
,z ,t) = 0 (1)
对于理想流体 ,流体沿物面流动 ;因此 ,流场的
物面边界条件可以表示为
d
f
/dt
=
抄
f
/抄 t
+
楚
矱
·
楚
f
(2)
假定两栖 UAV 入水前 ,流体处于静止状态 ,
则流场的初始条件和外边界条件可以表示为
φ
(x ,
y
,z ,0) =
抄
φ
(x ,
y
,z ,0)
抄t
=
0 (3)
[
φ
(x ,
y
,z ,t)]
∞
=
0 (4)
对于理想流体 ,流体沿物面流动 ,因此 ,流场的
物面边界条件可以表示为
d
f
/dt
=
抄
f
/抄 t
+
楚
φ
·
楚
f
(5)
不可压缩流体非定常势流流场的压强分布为拉格
朗日积分为
p
(x ,
y
,z ,t) -
p
∞
ρ
-
z
g
+
1
2
( 楚
φ
)
2
+
抄
φ
抄t
=
0 (6)
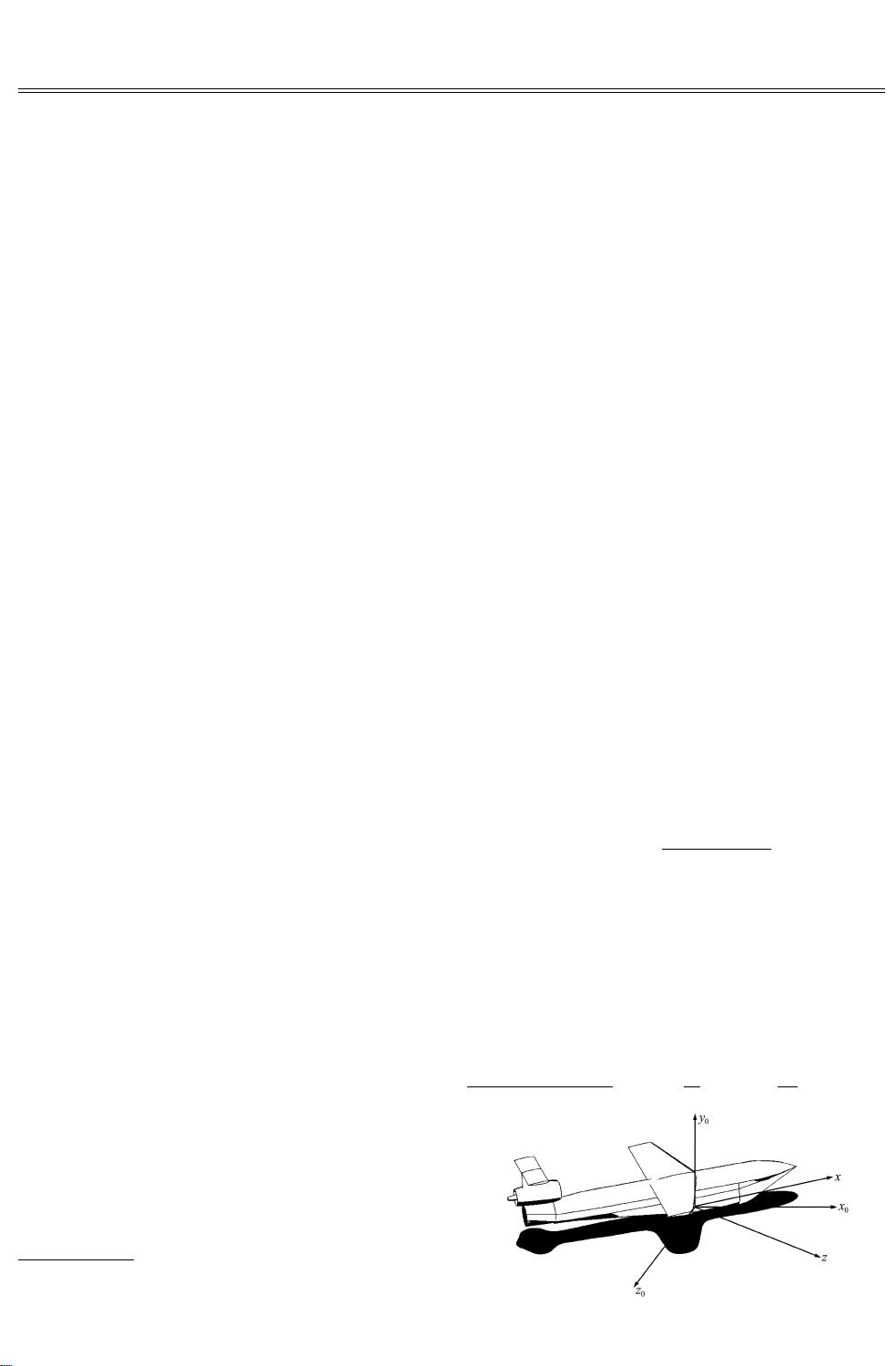
图 1 两栖 UAV 示意图
Fig .1 T he amphibious schmatic
下载后可阅读完整内容,剩余4页未读,立即下载
2022-10-27 上传
2022-06-07 上传
2021-08-14 上传
2022-10-27 上传
2021-10-01 上传
2024-06-23 上传
2022-07-13 上传
2022-05-10 上传
2024-06-23 上传

weixin_38557935
- 粉丝: 0
- 资源: 955
 我的内容管理
展开
我的内容管理
展开







最新资源
- 掌握Jive for Android SDK:示例应用的使用指南
- Python中的贝叶斯建模与概率编程指南
- 自动化NBA球员统计分析与电子邮件报告工具
- 下载安卓购物经理带源代码完整项目
- 图片压缩包中的内容解密
- C++基础教程视频-数据类型与运算符详解
- 探索Java中的曼德布罗图形绘制
- VTK9.3.0 64位SDK包发布,图像处理开发利器
- 自导向运载平台的行业设计方案解读
- 自定义 Datadog 代理检查:Python 实现与应用
- 基于Python实现的商品推荐系统源码与项目说明
- PMing繁体版字体下载,设计师必备素材
- 软件工程餐厅项目存储库:Java语言实践
- 康佳LED55R6000U电视机固件升级指南
- Sublime Text状态栏插件:ShowOpenFiles功能详解
- 一站式部署thinksns社交系统,小白轻松上手
