无传感器PMSM磁场定向控制: PLL估算与FW技术
"永磁同步电机(PMSM)的无传感器磁场定向控制结合了PLL技术,用于实现高效、精确的电机控制。无传感器控制消除了对传统位置传感器的依赖,降低了系统的复杂性和成本。PLL(锁相环)估算器在这一过程中起着关键作用,帮助估计电机的转子位置和速度。"
永磁同步电机(PMSM)在现代工业应用中广泛使用,得益于其高功率密度、快速响应和高效率。为了实现最优控制,磁场定向控制(FOC)成为了一种理想的选择。FOC的主要目标是通过解耦电流分量,使得电流控制更加类似于直流电机,从而最大化转矩产生和效率。
在无传感器的FOC中,无需物理位置传感器,而是依赖于算法来估计电机的状态。锁相环(PLL)是一种常用的估算技术,它可以跟踪电机的电气角度,从而确定转子的位置。PLL通过比较电机电压和电流的相位,调整逆变器的开关频率,以保持两者间的相位锁定。这样,即使在没有直接转子位置反馈的情况下,也能精确控制电机。
在AN2520文档中,介绍了如何结合PLL估算器和基于公式的弱磁(flux weakening)技术来实现PMSM的无传感器控制。弱磁技术允许电机在超过其额定磁场强度的情况下运行,扩展了电机的运行范围。这一方法可以提高高速下的输出转矩,尤其是在电机进入弱磁区域时。
应用笔记AN1078和AN908进一步详细阐述了FOC的基本概念,而AN1292则讨论了PLL估算器和弱磁控制的具体实现。开发板如dsPICDEM MCLV-2提供了实验平台,使得开发者能够方便地测试和验证这些高级控制策略,无需额外硬件。
通过无传感器FOC与PLL的集成,PMSM控制系统可以实现高效、灵活且可靠的运行,适应各种应用需求,同时减少对硬件的依赖,降低系统成本。这对于追求高性能和低成本的电机控制设计来说至关重要。微芯科技(Microchip Technology Inc.)提供的16位和32位微控制器(MCU)以及相关工具集,为工程师提供了强大的支持,加速了产品开发过程,并确保了在电机控制领域的先进性。
AN2520
DS00002520B_CN 第4页 2018 Microchip Technology Inc.
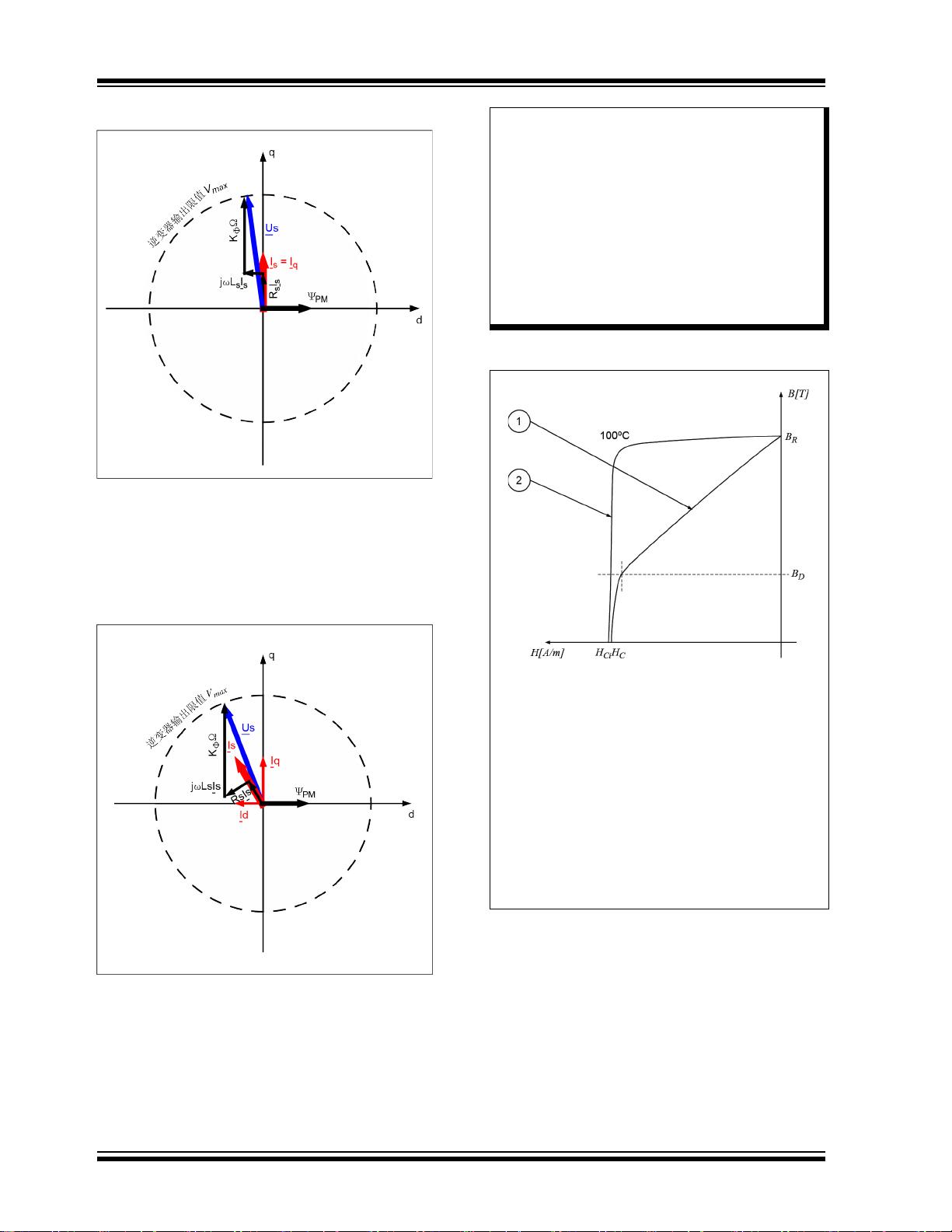
图
3
:
FOC
向量图(基本速度)
在FOC恒定功率模式下,无法有效实现相关电机的弱
磁,因为气隙空间较大,这意味着减弱的电枢反应磁通
会干扰转子的永磁体磁链。因此,实现的最大速度不得
超过待测试电机基本速度的两倍。图4显示了恒定功率、
弱磁(Flux Weakening,FW)模式下的向量方向。
图
4
:
FOC
向量图(高速——
FW
)
注意:
在对表面永磁(Surface Permanent Magnet,
SPM)型PMSM进行弱磁时,如果未采取谨
慎的措施,或者未遵循电机制造商的规范,
则可能会导致转子发生机械损坏以及永磁体
消磁。永磁体通常用环氧胶粘剂来粘合,或
者用不锈钢或炭纤维环来固定。如果超过了
制造商规定的最大速度,磁体可能会脱落或
损坏,这会导致转子以及附在电机轴上的其
他机械部件受损。对于气隙磁通密度,超过
磁通密度拐点B
D
可能会导致消磁,如图5
所示。
图
5
:
永磁体的滞后曲线(理论上)
滞后曲线
1. 永磁体的固有特性。
2. 永磁体的一般特性。
其中:
H = 磁场强度
B = 磁感应强度
B
R
= 永磁感应强度
H
C
= 矫顽性
H
Ci
= 固有矫顽性
剩余15页未读,继续阅读
2019-12-13 上传
2019-07-26 上传
2022-06-17 上传
119 浏览量
2019-12-13 上传
2022-07-14 上传
点击了解资源详情
2023-06-07 上传
2019-12-13 上传

nidelanse1111
- 粉丝: 9
- 资源: 16
 我的内容管理
展开
我的内容管理
展开







最新资源
- SSM Java项目:StudentInfo 数据管理与可视化分析
- pyedgar:Python库简化EDGAR数据交互与文档下载
- Node.js环境下wfdb文件解码与实时数据处理
- phpcms v2.2企业级网站管理系统发布
- 美团饿了么优惠券推广工具-uniapp源码
- 基于红外传感器的会议室实时占用率测量系统
- DenseNet-201预训练模型:图像分类的深度学习工具箱
- Java实现和弦移调工具:Transposer-java
- phpMyFAQ 2.5.1 Beta多国语言版:技术项目源码共享平台
- Python自动化源码实现便捷自动下单功能
- Android天气预报应用:查看多城市详细天气信息
- PHPTML类:简化HTML页面创建的PHP开源工具
- Biovec在蛋白质分析中的应用:预测、结构和可视化
- EfficientNet-b0深度学习工具箱模型在MATLAB中的应用
- 2024年河北省技能大赛数字化设计开发样题解析
- 笔记本USB加湿器:便携式设计解决方案
