能力风暴机器人无线通信控制系统设计
版权申诉
17 浏览量
更新于2024-06-23
收藏 1.74MB DOC 举报
"基于能力风暴机器人的无线通信技术在机器人控制系统中的应用,涉及无线通信模块、硬件电路设计、软件流程及源代码实现、调试结果和课程设计总结。"
本文档详细介绍了基于能力风暴机器人实现无线通信的过程,目标是构建一个能够通过无线方式实时控制机器人运动轨迹、速度、旋转角度以及执行灭火功能的系统。能力风暴机器人配备有无线通信模块、无线视频接收器和微型无线摄像机等配件,但由于条件限制,视频模块未能实现。
设计的主要功能包括:
1. 实时采集现场图像信息:虽然实际设计中未实现视频传输,但理论上应能通过无线摄像机获取环境信息。
2. 机器人运动控制:用户可以通过PC发送指令,控制机器人的运动速度、旋转角度。
3. 灭火功能:利用电风扇作为灭火装置,根据指令开关风扇执行灭火任务。
4. 自主漫游(避障运动、录像):机器人具备避障功能,能在场地内自主移动,且理论上应能记录运动过程。
在硬件设计方面,主要使用了以下组件:
1. 能力风暴智能机器人作为基础平台。
2. 小型无线摄像机用于获取环境信息,但未实际应用。
3. 两套无线通讯模块,一套用于PC发射指令,另一套用于机器人接收。
4. 灭火配件包括电风扇和支架。
5. 各类工具如电焊工具、接线工具、万用表等用于硬件组装和调试。
软件部分主要包括:
1. 上位机程序编写:这是在PC端控制机器人行为的应用程序。
2. 单片机程序开发:包括收发测试程序和主程序,其中风扇控制模块在初期阶段未添加。
调试过程中,通过串口调试精灵对上位机和单片机通信进行了验证,确保指令的正确收发。设计者提到,尽管存在一些未解决的问题(如视频模块未实现),但其他功能已经能够实时响应并控制机器人,达到了预期的无线控制效果。
这个课程设计项目展示了如何将无线通信技术应用于机器人控制系统,为实现远程操控和自主导航提供了基础。通过优化和扩展,这种系统有望在未来实现更复杂的机器人应用,如增强的视觉感知和更精确的任务执行。
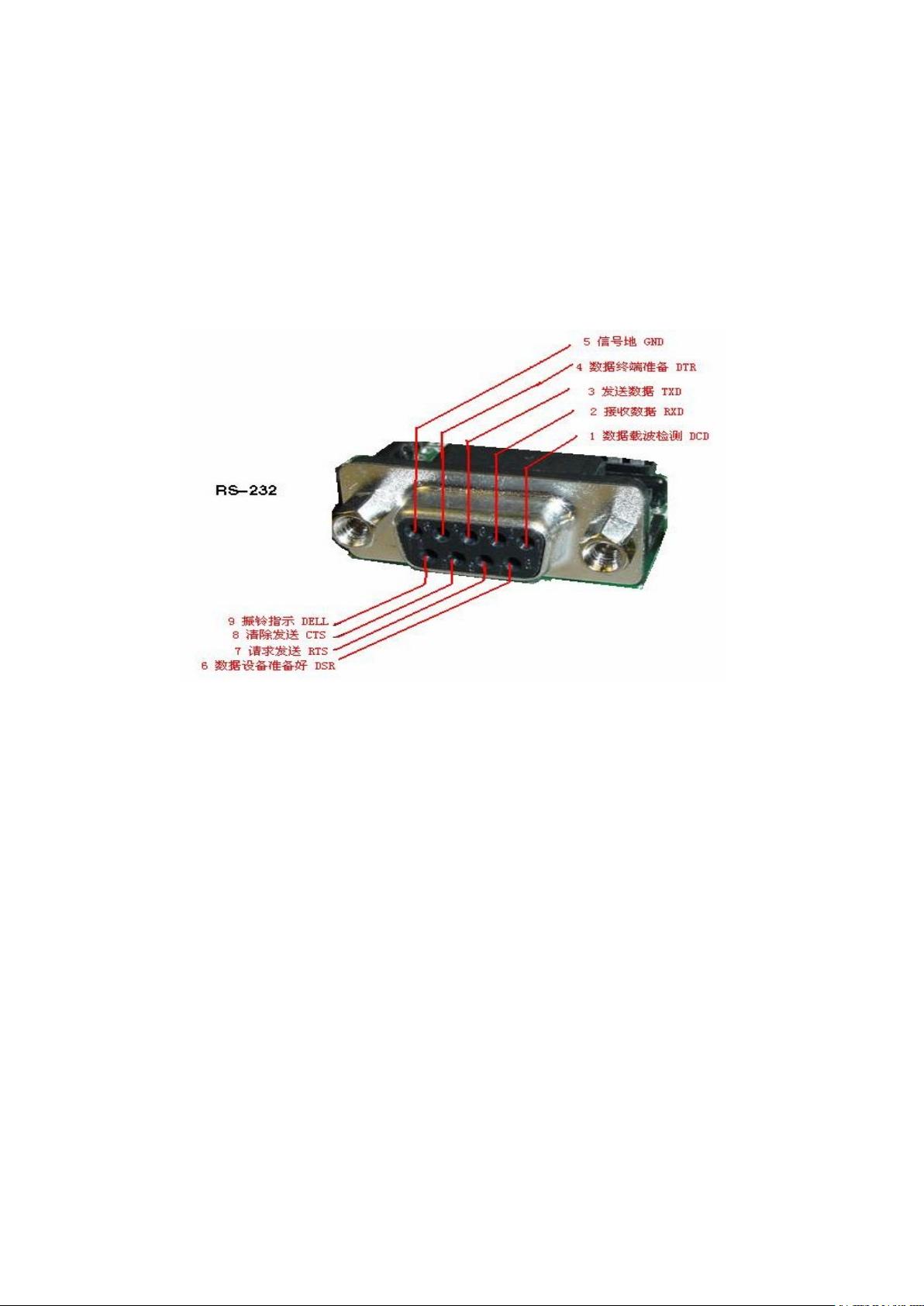
A/TX 引线接在 USB 口的 3 引脚,B/RX 引线接 USB 的 2 引脚,
焊接时注意,需要实际的测试 USB 的 2,3 引脚与单片机引脚的链
接方式,以防出错。
上位机与无线通信模块的连接
连接时只需将 RS232 与 3 对应的引线接在无线通信模块的
B/RX 端,与 2 对应的引线接 A/TX 端。另外,要为无线通信模块
提供 3.6—5V 的电源。
在调试无线通信模块时关于 ABC 跳线的选择一定要先断掉电
源,不然,跳线不会起作用,因为,无线通信模块的单片机只在接通
电源初始化时去读取 ABC 的值。

剩余46页未读,继续阅读
2021-09-27 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情

omyligaga
- 粉丝: 97
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 新疆乡镇级区划图 shp格式
- jquery拖拽排序插件
- 围绕着主按钮弹次按钮特效
- spark-infotheoretic-feature-selection:该软件包包含贪婪的信息理论特征选择(FS)方法的通用实现。 该实现基于Gavin Brown提出的通用理论框架。 提供了mRMR,InfoGain,JMI和其他常用FS过滤器的实现
- 猜数字:允许用户猜数字并检查是否是计算机的实际猜测的游戏
- XX建筑装饰工程公司商业计划书(全程策划案)
- js滑动验证码插件
- pnc:用于管理,执行和跟踪构建的系统
- 天津市乡镇级区划图 shp格式
- 手写简单的Tomcat(代码源于韩顺平老师的javaweb章节)
- ch123ck.github.io
- ShinePlaceholderView
- jwtgcpgen
- XX工矿设备公司人力资源管理标准流程规范
- 四川省乡镇级区划图 shp格式
- ODE2STAB:积分微分方程组直到达到稳定(或时间结束)-matlab开发
