川崎机器人E系列激光传感器跟踪控制功能操作指南
需积分: 47 70 浏览量
更新于2024-07-09
1
收藏 1.92MB PDF 举报
"川崎机器人激光传感器跟踪功能适配控制功能操作说明书,主要涉及川崎E系列控制器,用于激光焊缝跟踪,适用于焊接应用。说明书包括安全指南、操作方法、培训需求以及版本更新和版权信息。"
这篇操作说明书详细介绍了川崎机器人E系列控制器上的激光传感器跟踪功能,该功能专为激光焊缝跟踪而设计,旨在提升焊接过程中的精度和效率。川崎机器人在焊接领域的应用中,结合激光传感器,能够实时监测和调整焊缝位置,确保焊接质量。
首先,安全是使用川崎机器人进行激光焊缝跟踪作业的首要考虑因素。用户需先阅读并理解安全手册,以及与E系列控制器相关的安装连接说明书,包括机械臂篇、控制器篇和电弧焊适用篇,确保在充分理解所有安全规定和操作步骤后再进行实际操作。同时,用户还需要参考“操作说明书”、“电弧焊规格操作说明书”、“AS语言说明书”和“电弧焊专用AS语言说明书”,以获取更全面的使用指导。
说明书指出,由于内容不涵盖机器人所适用的整个系统,因此对于因系统问题引发的事故或损害,川崎公司不承担责任。为了确保安全和有效操作,建议操作人员参加川崎提供的专门培训课程。此外,川崎保留对书中内容进行修订、改进或变更的权利,且不作另行通知,使用者应保持对最新版说明书的关注。
书中还强调了版权保护,禁止未经许可的转载或复制。当设备的使用者变更时,必须将说明书与设备一同转交,以确保新使用者能遵循正确的操作规程。若说明书丢失或损坏,应及时联系川崎的营业人员。
在操作中,书中使用特定的警示符号来突出关键的安全注意事项,包括“危险”、“注意”和“警告”,以防止可能造成人身伤害或设备损坏的情况发生。例如,“危险”符号提示不遵守操作可能导致死亡或严重伤害,“注意”符号警告不合规操作可能引起伤害或设备损坏,“警告”则强调在执行特定任务时,遵循图例和操作顺序的重要性。
这份操作说明书为川崎机器人激光传感器跟踪功能的使用者提供了详尽的指导,涵盖了从安全预防措施到实际操作流程的各个方面,确保用户能够安全、有效地利用这一先进技术进行激光焊缝跟踪作业。

1-
9
E 系列控制器 1. 激光跟踪功能
Kawasaki Robot 激光传感器跟踪功能/适配控制功能 操作说明书
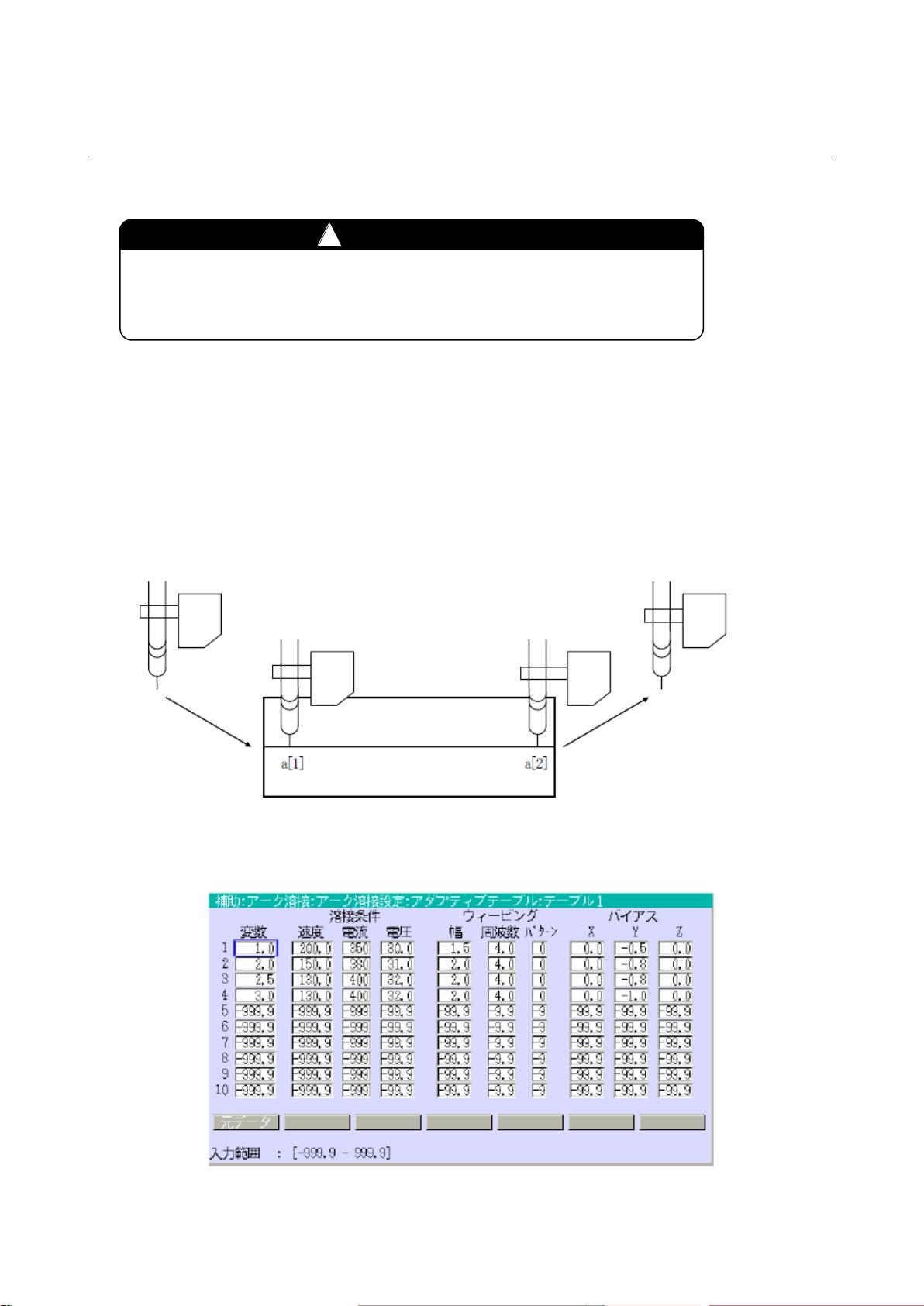
系统数据(帮助 1404:15 激光传感器)
程序示例
W1SET 1=200, 350, 29, 1, 4, 0 ;焊接条件
LT ON ;利用激光传感器启动模拟
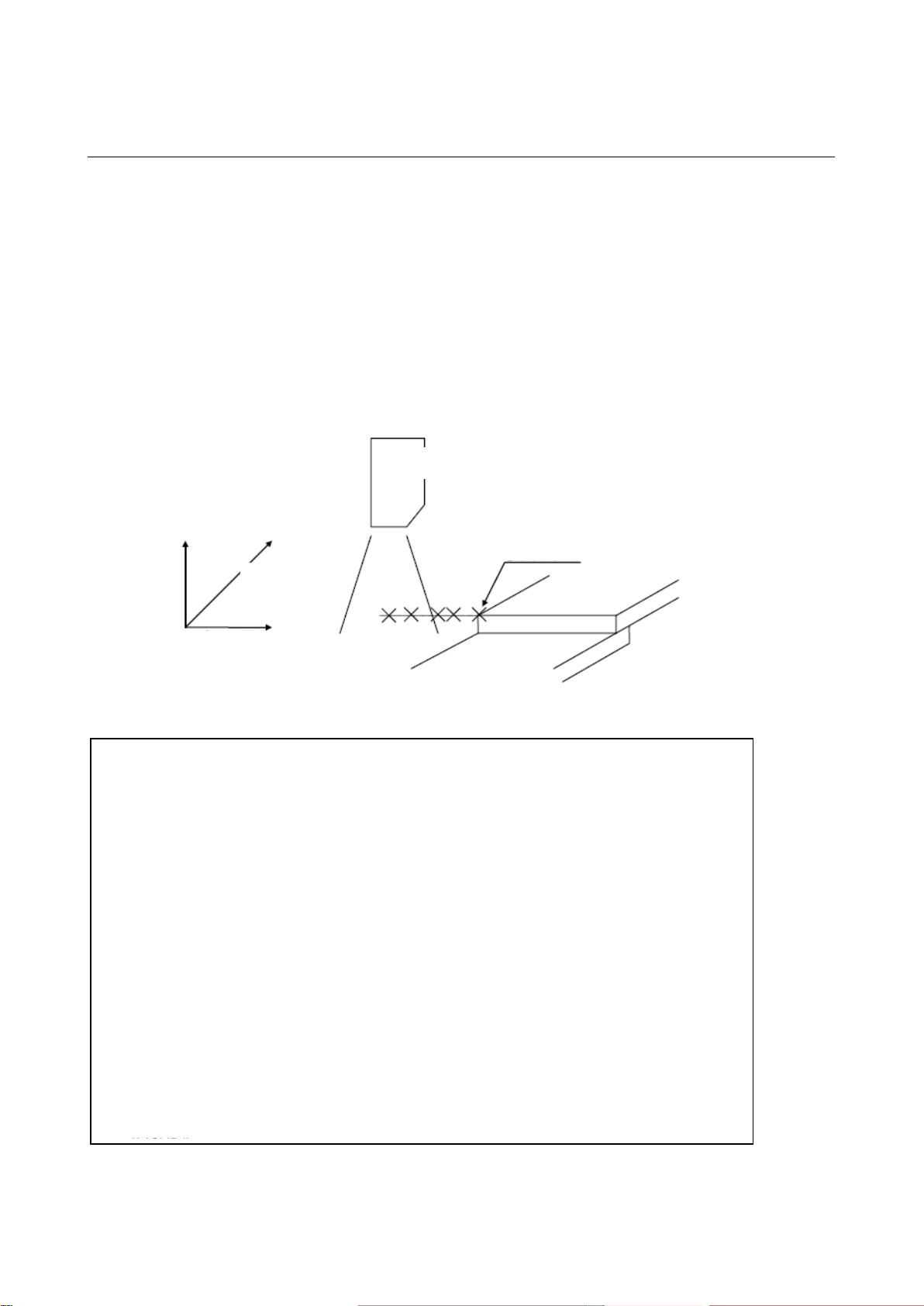
LTS ON ;起始端部分检验打开
LTE ON ;终止端部分检验打开
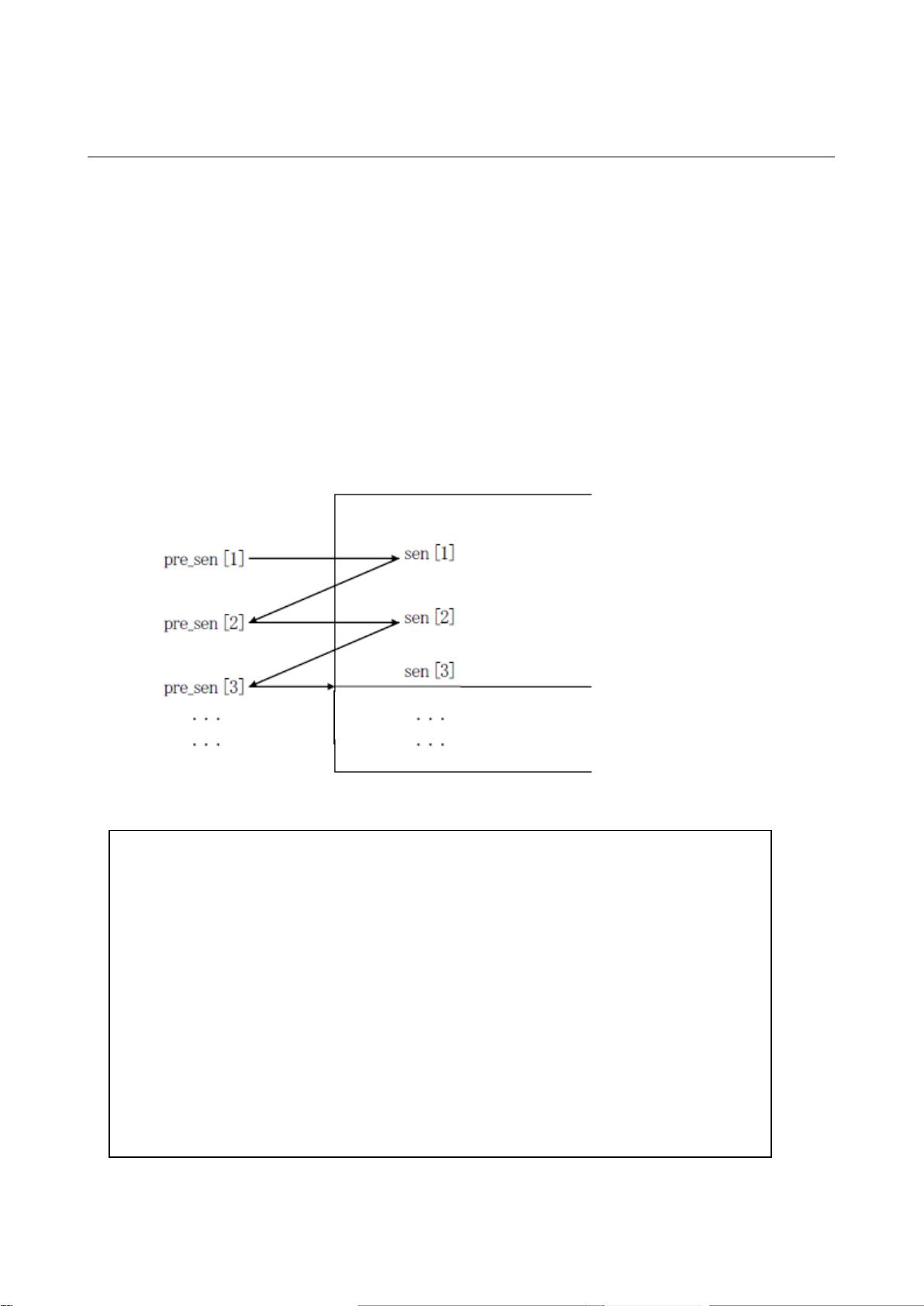
LTSCNT 3 ;用于确定焊接起始点的偏置次数
LTECNT 5 ;用于确定焊接终止点的偏置次数
LTSDIR 0,0,0 ;起始端部分检验方向设置为默认方向
LTSPOINT NULL ;起始端部分检验方向设置为默认方向
ADP OFF ;无适配功能
LAPPRO a[1], 100
LWS a[1] ;开始焊接
LWE a[2], 1 ;焊接完毕
BREAK
JMOVE HERE
LDEPART 100
剩余103页未读,继续阅读
2023-07-12 上传
2021-08-12 上传
2021-01-31 上传
2023-03-06 上传
2021-08-14 上传
点击了解资源详情

weixin_42900194
- 粉丝: 2
- 资源: 14
 我的内容管理
展开
我的内容管理
展开







最新资源
- 磁性吸附笔筒设计创新,行业文档精选
- Java Swing实现的俄罗斯方块游戏代码分享
- 骨折生长的二维与三维模型比较分析
- 水彩花卉与羽毛无缝背景矢量素材
- 设计一种高效的袋料分离装置
- 探索4.20图包.zip的奥秘
- RabbitMQ 3.7.x延时消息交换插件安装与操作指南
- 解决NLTK下载停用词失败的问题
- 多系统平台的并行处理技术研究
- Jekyll项目实战:网页设计作业的入门练习
- discord.js v13按钮分页包实现教程与应用
- SpringBoot与Uniapp结合开发短视频APP实战教程
- Tensorflow学习笔记深度解析:人工智能实践指南
- 无服务器部署管理器:防止错误部署AWS帐户
- 医疗图标矢量素材合集:扁平风格16图标(PNG/EPS/PSD)
- 人工智能基础课程汇报PPT模板下载
