ABB机器人FlexPendant操作指南与安全须知
需积分: 9 154 浏览量
更新于2024-07-20
收藏 6.59MB PDF 举报
本资源是ABB Robotics的"带FlexPendant的IRC5操作员手册",适用于M2004版本,文档编号为3HAC16590-10,由ABB Robotics于2012年9月17日更新,作者版本为1181。该手册详细阐述了操作IRC5系列机器人时的安全措施和注意事项。
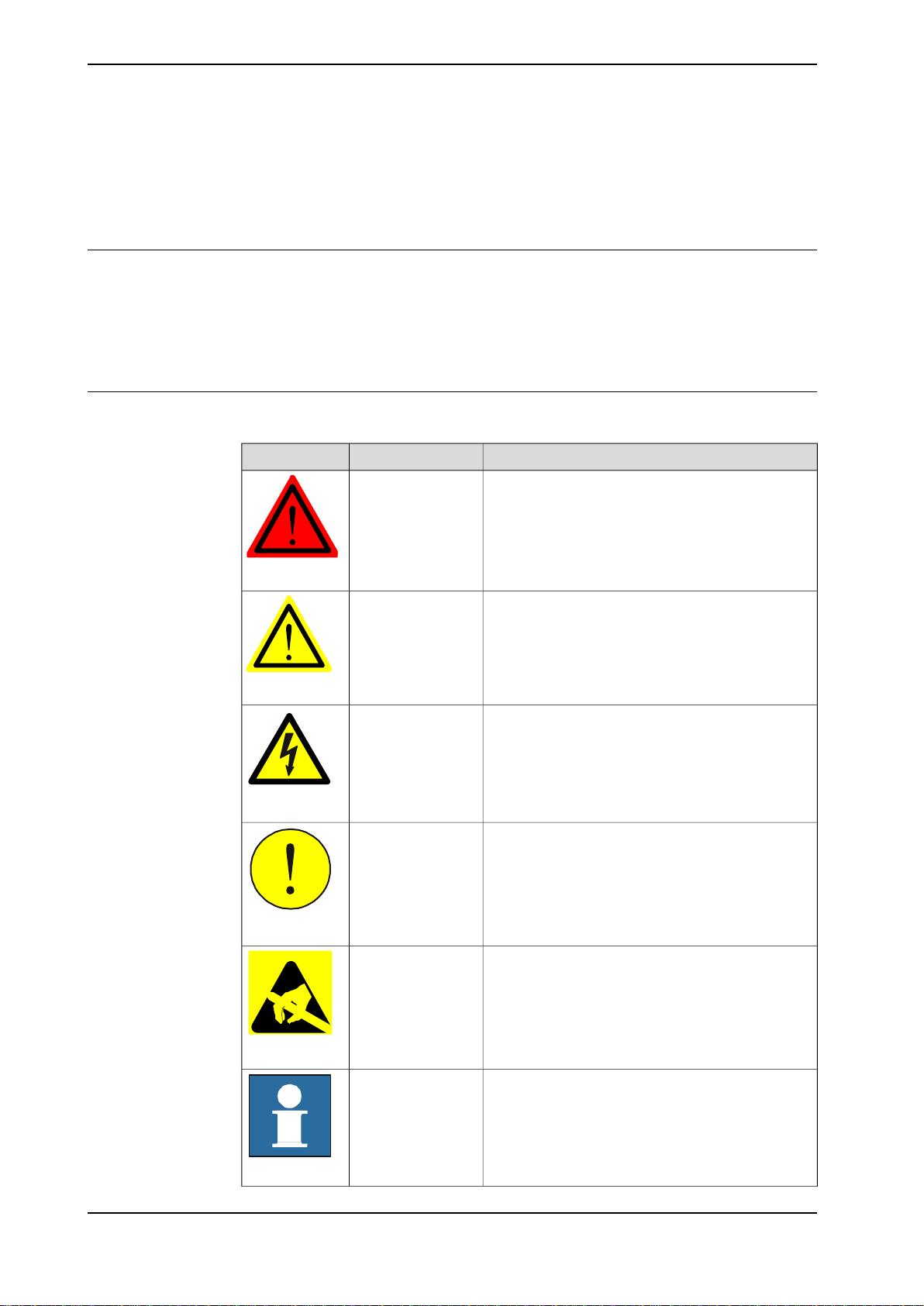
首先,手册强调了安全的重要性,列出了多个与安全相关的章节,如"安全",其中涵盖了关于本章的介绍,包括适用的安全标准,如可能涉及的国际和国内法规。手册提供了丰富的安全术语解析,例如"紧急停止"、"安全停止"和"安全保护",这些都是机器人操作过程中必须理解和遵循的基本概念。对于没有轴制动闸的机器人,特别强调了存在致命危险的可能性,要求操作者在操作前确认主电源已关闭,并避免移动操纵器可能导致的严重后果。
警告部分提到了机器人容易受到静电的影响,要求用户采取适当的防静电措施。手册还指导操作者如何处理紧急情况,如在遇到问题时应立即停止系统、释放机器人制动闸、进行灭火以及如何从紧急停止状态恢复正常。工作中的安全事项部分,着重于操作者自身的防护和正确使用FlexPendant控制器,包括但不限于概述、个人安全防范以及与操纵器相关的操作指南。
此外,本手册还包含了操作步骤和注意事项,确保用户在操作ABB机器人时能够遵循最佳实践,减少事故风险。值得注意的是,除非得到ABB的书面许可,否则禁止复制或再生本手册,同时提醒读者,手册中的信息可能会随时间更新,但未经通知不会另外发布新版本。
这份操作员手册是ABB机器人操作的重要参考,它旨在提供全面的安全指导,确保用户在操作过程中能够理解和遵守严格的规程,从而保障人员和机器设备的安全。

操作员手册
操作员手册说明了产品的实际处理过程。手册面向与产品有着直接接触操作的人员,
即生产车间操作员、程序员和故障排除人员.
此套手册包括(特别是)::
• 操作员手册 - 紧急安全信息
• 操作员手册 - 一般安全信息
• 操作员手册 - 使用入门、IRC5 和 RobotStudio
• Operating manual - Introduction to RAPID
• 操作员手册 - 带 FlexPendant 的 IRC5
• 操作员手册 - RobotStudio
• 操作员手册 - IRC5 故障排除,用于控制器和操纵器。
16 3HAC16590-10 修订: T
© 版权所有 2004-2012 ABB。保留所有权利。
产品说明文档, M2004
续前页

剩余363页未读,继续阅读
2021-10-09 上传
2014-12-23 上传
2023-07-11 上传
2023-07-11 上传
2018-03-18 上传
2018-09-18 上传
2022-12-20 上传
2017-11-28 上传
2018-12-11 上传

sinat_33497001
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 基于Python和Opencv的车牌识别系统实现
- 我的代码小部件库:统计、MySQL操作与树结构功能
- React初学者入门指南:快速构建并部署你的第一个应用
- Oddish:夜潜CSGO皮肤,智能爬虫技术解析
- 利用REST HaProxy实现haproxy.cfg配置的HTTP接口化
- LeetCode用例构造实践:CMake和GoogleTest的应用
- 快速搭建vulhub靶场:简化docker-compose与vulhub-master下载
- 天秤座术语表:glossariolibras项目安装与使用指南
- 从Vercel到Firebase的全栈Amazon克隆项目指南
- ANU PK大楼Studio 1的3D声效和Ambisonic技术体验
- C#实现的鼠标事件功能演示
- 掌握DP-10:LeetCode超级掉蛋与爆破气球
- C与SDL开发的游戏如何编译至WebAssembly平台
- CastorDOC开源应用程序:文档管理功能与Alfresco集成
- LeetCode用例构造与计算机科学基础:数据结构与设计模式
- 通过travis-nightly-builder实现自动化API与Rake任务构建
