机器人动力学:运动学与D-H矩阵详解
版权申诉
PPT格式 | 1.69MB |
更新于2024-07-03
| 77 浏览量 | 举报
该PPT课件是关于机器人机构分析与综合的一个部分,专注于机器人动力学的讲解。主要内容包括机器人运动学的基础概念和数学模型。运动学是研究机器人手部在空间中的运动如何与关节运动相互关联的学科,主要涉及两个问题:正问题,即已知关节运动求手部的运动;逆问题,即已知手部运动求关节运动的具体参数。
在数学模型方面,机器人运动通过位姿变化表示,使用位姿矩阵M来描述,而关节运动则用关节变量qi表示,其中i=1到n。运动学方程就是描述这两个之间的关系,即M等于qi的函数M=f(qi)。这表明了通过关节变量的变化可以推算出手部的运动状态。
此外,课件还介绍了齐次变换矩阵(也称为D-H矩阵),这是一种重要的工具。它利用齐次坐标的概念来完成坐标变换,其中包含了位置坐标和旋转信息。齐次变换矩阵的表达式包含了原点坐标、三个方向余弦,以及它们在不同坐标系之间的转换。矩阵的构造具有重要意义,因为一个通用的齐次坐标变换矩阵可以分解为平移和旋转的组合,便于理解和计算。
课件进一步解释了齐次变换矩阵的结构,例如矩阵的元素组成和它们在实际应用中的作用。通过平移矩阵和平旋矩阵的乘积,可以实现从一个坐标系到另一个坐标系的精确转换,这对于机器人运动学和控制设计至关重要。
这门课件深入探讨了机器人动力学中运动学基础、数学模型以及齐次变换矩阵的运用,对于理解机器人如何在三维空间中进行精确运动和控制具有重要的理论价值。学习者将能够掌握如何通过关节参数来描述机器人的运动,并能够理解和应用齐次变换来处理坐标系间的变换问题。
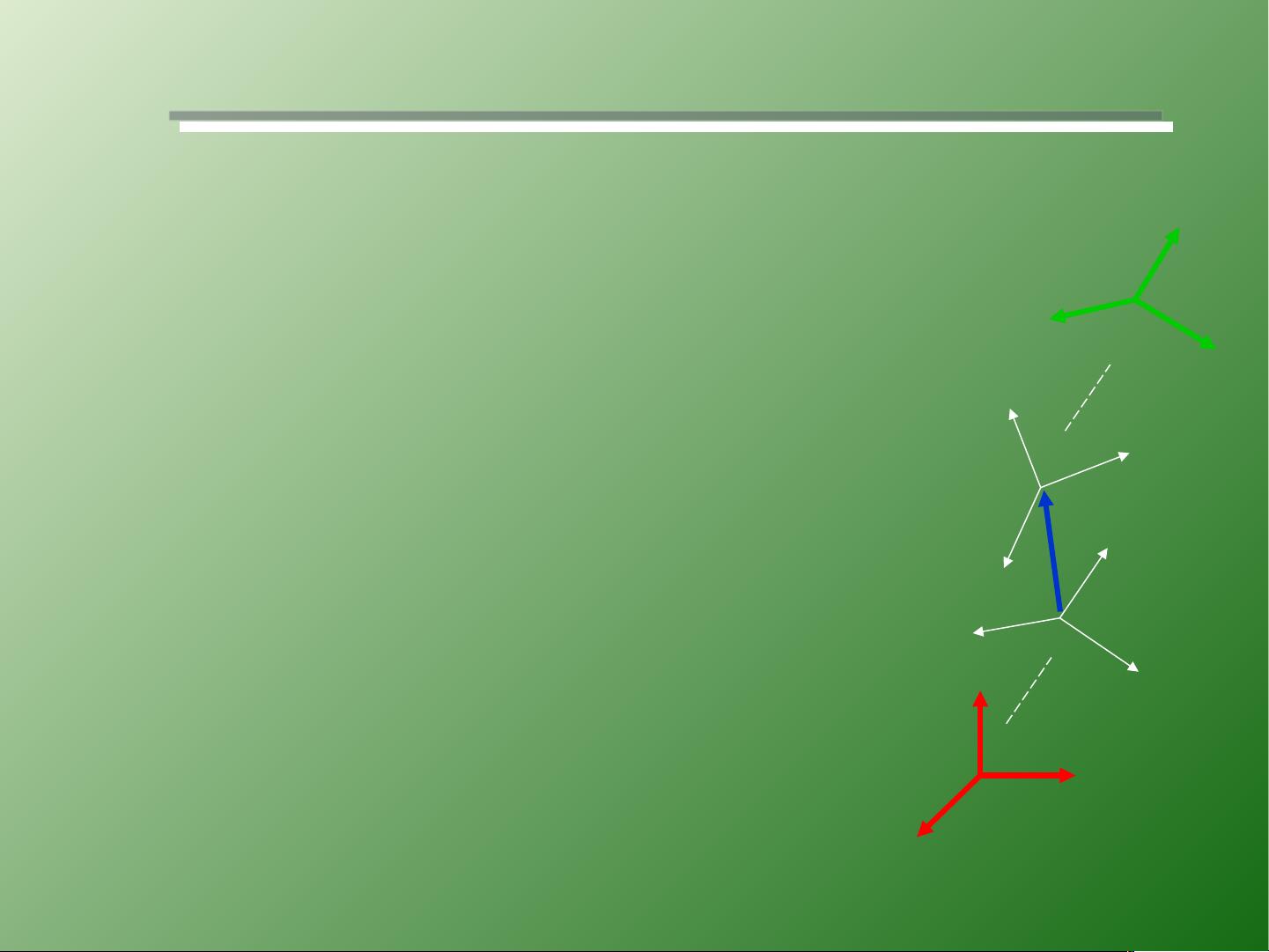
( 2 )齐次变换矩阵( D-H 矩阵)
③ 联合变换与单步齐次矩阵的关系
当空间有任意多个坐标系
时,若已知相邻坐标系之间的齐次坐
标变换矩阵,则由坐标变换原理可知:
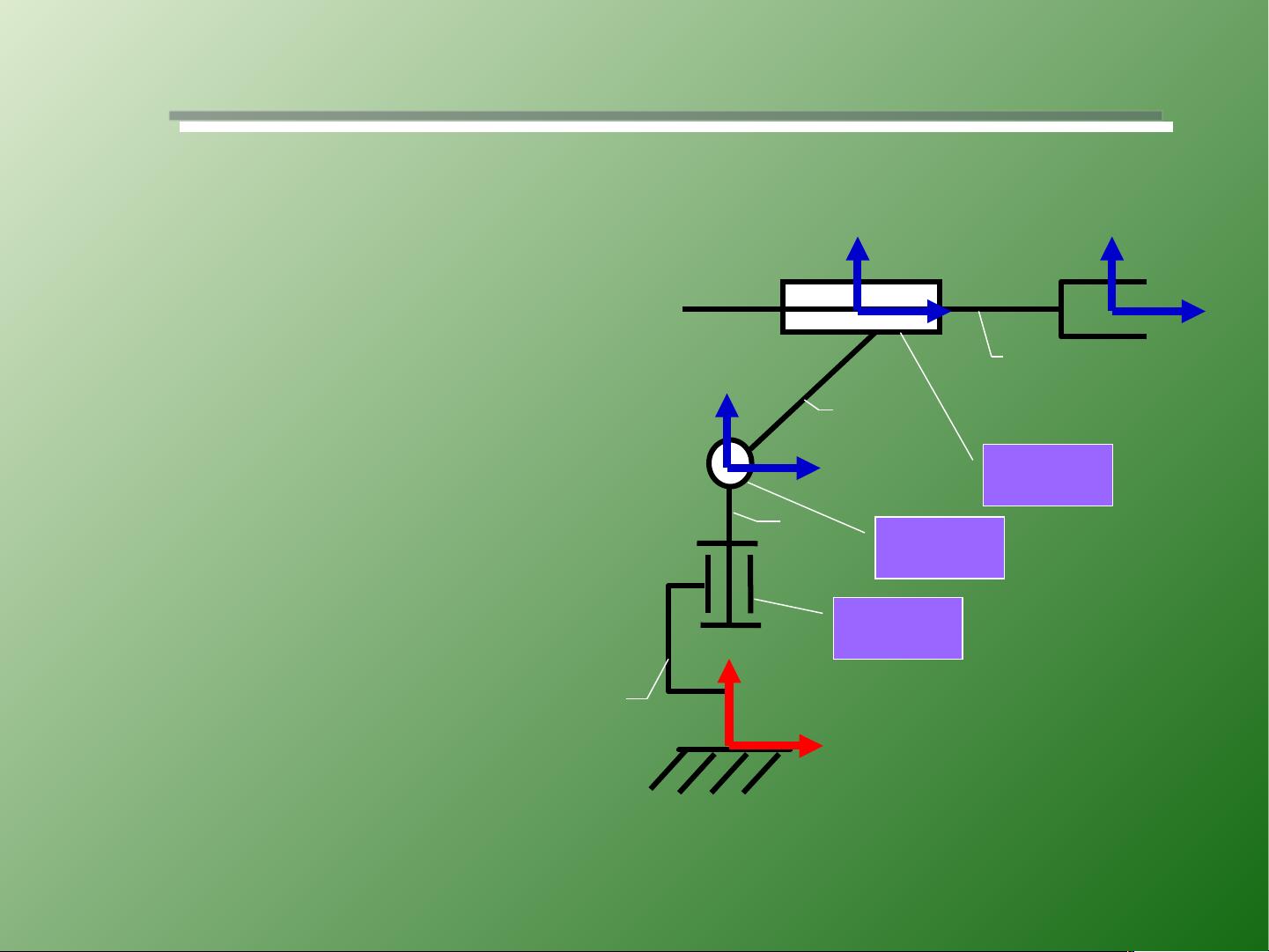
由此可知,建立机器人的坐标
系,可以通过齐次坐标变换,将机器
人手部在空间的位置和姿态用齐次坐
标变换矩阵描述出来,从而建立机器
人的运动学方程。
3.1
3.1
坐标变换
坐标变换
{0
}
{i-
1}
{i}
{n
}
nniin
MMMMM
1112010
剩余37页未读,继续阅读
相关推荐



智慧安全方案
- 粉丝: 3847
- 资源: 59万+
 我的内容管理
展开
我的内容管理
展开







