GPU深度渲染:1280x720实时高质DIBR方法
130 浏览量
更新于2024-08-30
收藏 251KB PDF 举报
本文主要探讨了在GPU上实现基于深度图像的实时渲染(Real-time Depth-Image-Based Rendering, DIBR)技术,针对1280×720分辨率的场景。作者提出了一种深度适应性预处理和超分辨率相结合的方法,旨在提升渲染质量和速度,充分利用GPU的并行计算能力,从而实现实时的深度图像渲染效果。
首先,对于立体3D(Stereoscopic 3D, S3D)视频,它作为一种新兴媒体形式,通过模拟人眼视觉系统(Human Visual System, HVS)的工作原理,提供给观众更为真实和沉浸式的观影体验。S3D视频通常由双目立体成像系统捕捉,并在3D电视等设备上播放,创造出立体效果。
文章的重点在于介绍了一种创新的GPU策略,即深度图像的深度适应性预处理。这种方法通过精细调整深度图像,确保在不同场景和光照条件下,渲染出清晰、准确的深度信息,从而提高渲染的细节表现力。此外,文章还提到了超分辨率技术的应用,通过提升图像分辨率,进一步增强画面的细腻度和清晰度,使深度图像在渲染时呈现出更高的视觉质量。
为了实现真正的实时性能,作者强调了GPU的并行计算优势。GPU架构特别适合大规模并行处理任务,如深度图像的计算密集型操作。通过将深度图像渲染分解为多个并行执行的任务,可以显著缩短处理时间,确保整个过程能在合理的时间内完成,满足实时渲染的需求。
实验结果显示,与现有方法相比,作者提出的深度图像基于GPU的实时渲染方法在渲染质量和计算效率上都表现出色。关键词包括深度图像渲染(DIBR)、GPU、洞填充(hole filling,可能指的是对深度图中的空洞或缺失部分进行修复)、并行计算以及实时性,这些是理解该研究的核心要素。
总结来说,这篇文章深入探讨了如何利用GPU的强大性能和先进的图像处理技术来优化深度图像渲染,以提供高质量且实时的立体3D视觉体验。这对于视频编码、游戏开发以及虚拟现实等领域具有重要的实际应用价值。
Real-time Depth-Image-Based Rendering on GPU
Zengzeng Sun
SRC-Xian DMC Lab/SSG, Samsung Electronics
Xi’an, China
zengzeng.sun@samsung.com
Cheolkon Jung
School of Electronic Engineering, Xidian University
Xi’an 710071, China
zhengzk@xidian.edu.cn
Abstract—In this paper, we propose real-time depth-image-
based rendering (DIBR) on GPU for 1280×720 resolution. We
utilize depth adaptive preprocessing and super-resolution to
achieve high-quality DIBR. Moreover, we employ GPU-based
parallel computing to achieve real-time DIBR. Experimental
results demonstrate that the proposed method achieves
superior performance in comparison with the existing methods
with respect to rendering quality and computing time.
1
Keywords- Depth-image-based rendering (DIBR), GPU, hole
filling, parallel computing, real-time.
I. INTRODUCTION
Stereoscopic 3D (S3D) videos are considered as a new
media which provides a realistic and immersive experience
to viewers [1]. They are captured by stereo imaging systems
imitating the human visual system (HVS), and played in S3D
displays such as 3DTV which provides viewers with 3D
effects [2]. Because they are recorded by 3D stereoscopic
cameras like 2D situations, there are some critical issues
such as synchronizing the stereoscopic cameras [3], storing
and transmission of a huge amount of data [4], etc. In
practice, future S3D displays provide viewers with the
services of navigating through the scenes to choose an
appropriate viewpoint depending on their positions for
reality and immersive, which is known as free-viewpoint
television (FTV) [5]. It is of more practical use to use S3D
videos using stereoscopic cameras. The existing 2D videos
should be converted into 3D ones to play on S3D displays.
Thus, recent studies have focused on virtual view synthesis
which generates various intermediate views using limited
number of camera images. Depth-image-based rendering
(DIBR) [6] is a well-known technique of virtual view
synthesis which generates novel views from a 2D reference
image and its corresponding depth image. A coding standard
for the video-plus-depth representation, known as MPEG-C
part 3 [7], is issued by MPEG due to the compression-
efficiency for transmission and compatibility with the
existing 2D broadcasting system. DIBR is also a core
technology in advanced three dimensional television system
(ATTEST 3DTV System) [8] whose goals include a 2D
compatible coding and transmission scheme for S3D videos
using MPEG-2/4/7 and a flexible and commercially feasible
3DTV system for broadcast environments. For the virtual
view synthesis, the 3D warping should be performed to map
1
This work was supported by the National Natural Science Foundation of
China (No. 61271298) and the International S&T Cooperation Program of
China (No. 2014DFG12780).
the pixels in the 2D reference image into desired virtual view
using explicit geometric information, depth maps, and
camera viewpoint parameters [9]. However, the 3D warping
generates obvious holes in the synthesized virtual view
mostly caused by the reason that occluded areas in the
reference image become visible in the synthesized virtual
view. The hole problem is an inherent problem in DIBR
because it has a great influence on the visual perceptual
quality of the generated S3D videos.
Various techniques have been proposed for hole-filling
[10]-[18]. They are classified into two main groups:
interpolation based hole-filling [10]-[14] and inpainting-
based hole-filling [15]-[17]. Recently, Solh et al. have
proposed a novel hole-filling approach in DIBR referred to
as hierarchal hole-filling (HHF) that fills in the holes using a
pyramid-like structure [18]. HHF yields a better rendering
quality than the other approaches, but suffers from blurred
results in the hole area around the object because the
upsampling from lower resolution produces blurred effects.
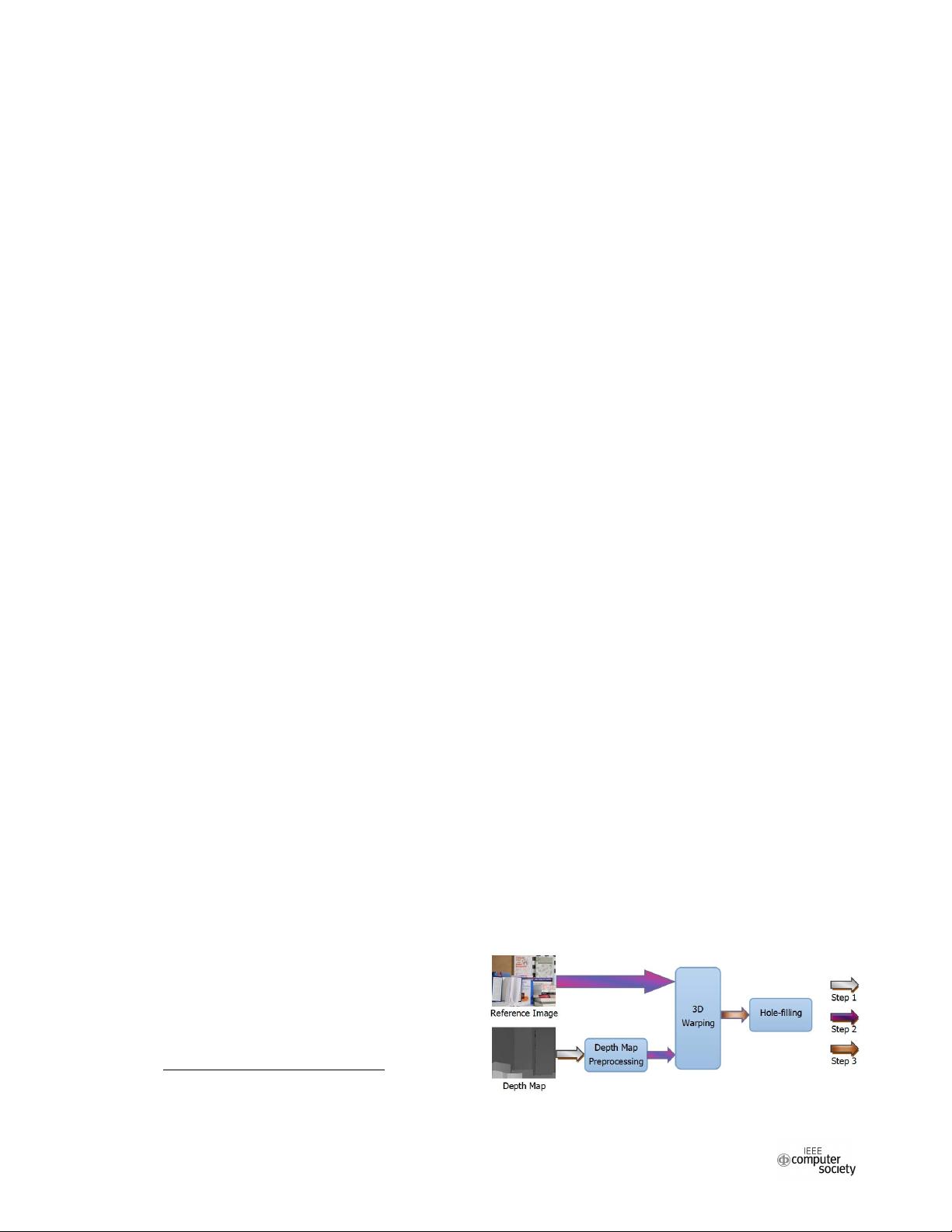
It is noteworthy that Zhang et al. [11] first introduce depth
map preprocessing into DIBR framework (see Fig. 1) which
is composed of three major components because a depth map
with horizontal sharp edges would result in big holes after
3D warping. They reduce the size of big holes before 3D
warping by smoothing the edges of the depth sharp transition,
which can make the subsequent hole-filling much more
easier. However, depth map preprocessing may bring about
the problems of geometric distortions and losses in depth
cues [19]. Thus, several approaches have been proposed to
reduce the artifacts of depth map preprocessing, but still
suffer from the annoying phenomena and remarkably
increasing the computational complexity. To implement
image processing algorithms in fast speed or real-time, the
parallelization based on graphics processing unit (GPU) have
recently become an active topic in the community [20], [21].
Real-time processing is required in the practical applications,
and the resultant quality of implementation should be
ensured under the real-time constraint as well.
Fig. 1 DIBR with depth map preprocessing, redrawn from [11].
2015 International Conference on Cyber-Enabled Distributed Computing and Knowledge Discovery
978-1-4673-9200-6/15 $31.00 © 2015 IEEE
DOI 10.1109/CyberC.2015.97
324
下载后可阅读完整内容,剩余4页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-09-25 上传
2021-09-25 上传
2021-09-25 上传
2021-09-25 上传
2021-09-25 上传
2021-09-25 上传

weixin_38620839
- 粉丝: 8
- 资源: 938
 我的内容管理
展开
我的内容管理
展开







最新资源
- 俄罗斯RTSD数据集实现交通标志实时检测
- 易语言开发的文件批量改名工具使用Ex_Dui美化界面
- 爱心援助动态网页教程:前端开发实战指南
- 复旦微电子数字电路课件4章同步时序电路详解
- Dylan Manley的编程投资组合登录页面设计介绍
- Python实现H3K4me3与H3K27ac表观遗传标记域长度分析
- 易语言开源播放器项目:简易界面与强大的音频支持
- 介绍rxtx2.2全系统环境下的Java版本使用
- ZStack-CC2530 半开源协议栈使用与安装指南
- 易语言实现的八斗平台与淘宝评论采集软件开发
- Christiano响应式网站项目设计与技术特点
- QT图形框架中QGraphicRectItem的插入与缩放技术
- 组合逻辑电路深入解析与习题教程
- Vue+ECharts实现中国地图3D展示与交互功能
- MiSTer_MAME_SCRIPTS:自动下载MAME与HBMAME脚本指南
- 前端技术精髓:构建响应式盆栽展示网站
