2021年意大利专家Alberto Bemporad的混合模型MPC算法详解
需积分: 9 137 浏览量
更新于2024-07-15
收藏 2.93MB PDF 举报
"4-hybrid_models.pdf"文档是一份由意大利专家Alberto Bemporad撰写的关于混合模型预测控制(Hybrid Model Predictive Control, MPC)的详细教程,该教程共分为九章,于2021年更新。这份资料旨在提供对MPC的基本概念、线性与非线性MPC的深入理解,以及不同类型的MPC方法如混合MPC、随机MPC和数据驱动MPC的介绍。
在课程的第一部分,作者首先阐述了基本的模型预测控制概念,强调了其在系统优化中的应用,特别是在电池管理系统(Battery Management System, BMS)中的SOC(State of Charge)估计以及永磁同步电机(PMSM)的性能控制方面。线性MPC介绍了时间-varying和非线性系统的处理策略,通过二次规划(Quadratic Programming, QP)和显式MPC方法来解决计算问题。
混合模型预测控制是本教程的核心部分,它涉及的是将连续动力学系统与离散逻辑控制相结合的系统建模。在这种类型的系统中,状态变量(x_c(k))和输入变量(u_c(k))可以是连续的,同时存在二值状态(x_ℓ)和输入(u_ℓ),这些由有限状态机(Finite State Machine, FSM)定义,逻辑约束是其关键特性。另一方面,混合系统还可能包含连续状态和输入通过差分或微分方程进行描述,并且经常有线性不等式约束。
技术推动了对混合系统的深入研究,因为现实世界中的许多系统,如嵌入式系统、网络化的工业自动化设备,往往兼具连续性和离散性。这促使科学家们开发出能够适应这些复杂交互的控制策略,比如混合MPC,它能处理连续和离散信号的无缝切换,为实际工程应用提供了强大的工具。
整个课程提供了丰富的理论基础和实例分析,使读者能够掌握如何设计和实施混合模型预测控制系统,以应对现代工业环境中的动态变化和不确定性。课程链接可供进一步学习和参考:<http://cse.lab.imtlucca.it/~bemporad/mpc_course.html>。
这份文档是MPC领域的重要参考资料,对于理解混合系统建模和控制策略具有很高的价值,特别是对那些在电池管理系统和电动机控制等领域寻求高性能控制解决方案的工程师而言。
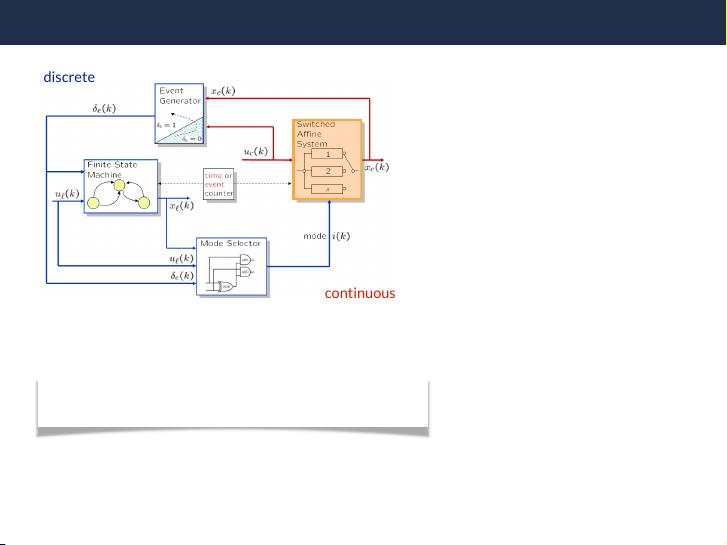
Switched affine system
continuous
discrete
• The afne dynamics depend on the current mode i(k):
x
c
(k + 1) = A
i(k)
x
c
(k) + B
i(k)
u
c
(k) + f
i(k)
x
c
∈ R
n
c
, u
c
∈ R
m
c
©2020 A. Bemporad - "Model Predictive Control" 9/51

剩余53页未读,继续阅读
2020-06-11 上传
2019-12-19 上传
2019-08-15 上传
2021-03-29 上传
2021-05-26 上传
2019-07-28 上传
2020-05-06 上传
2018-01-09 上传
2020-09-14 上传

feifanyyh
- 粉丝: 2
- 资源: 19
 我的内容管理
展开
我的内容管理
展开







最新资源
- 单片机串口通信仿真与代码实现详解
- LVGL GUI-Guider工具:设计并仿真LVGL界面
- Unity3D魔幻风格游戏UI界面与按钮图标素材详解
- MFC VC++实现串口温度数据显示源代码分析
- JEE培训项目:jee-todolist深度解析
- 74LS138译码器在单片机应用中的实现方法
- Android平台的动物象棋游戏应用开发
- C++系统测试项目:毕业设计与课程实践指南
- WZYAVPlayer:一个适用于iOS的视频播放控件
- ASP实现校园学生信息在线管理系统设计与实践
- 使用node-webkit和AngularJS打造跨平台桌面应用
- C#实现递归绘制圆形的探索
- C++语言项目开发:烟花效果动画实现
- 高效子网掩码计算器:网络工具中的必备应用
- 用Django构建个人博客网站的学习之旅
- SpringBoot微服务搭建与Spring Cloud实践
