四自由度码垛机器人设计与CERO2.0运动分析
版权申诉
DOC格式 | 2.16MB |
更新于2024-06-22
| 175 浏览量 | 举报
本文主要探讨了码垛机器人的机械结构设计,针对码垛机器人在物流自动化中的关键作用,特别是高速箱包码垛的需求。作者首先对码垛机器人的结构特点和性能指标进行了深入分析,以此为基础,提出了机械设计的基本要求,旨在为产品的开发提供指导。
在第一章“码垛机器人现状研究”中,作者阐述了码垛机器人在现代工业生产中的重要性,以及当前市场对于高效、精确的码垛能力的需求。引言部分概述了机器人技术如何适应产业升级,以及其在提高生产效率和降低人工成本方面的显著优势。接着,通过对现有码垛机器人的结构进行分析,探讨了其工作原理和常见的性能参数,如承载能力、工作速度和重复定位精度等。
第二章“码垛机器人的机械设计和电气控制”是核心部分。机械设计章节详细描述了四自由度码垛机器人的设计过程,考虑了其在搬运和码放货物时所需的灵活性和稳定性。设计过程中,注重了机器人的结构紧凑性、耐用性和负载能力的平衡。电气控制系统则介绍了机器人内部的电子元件配置,包括传感器、执行器和控制器的选择,以确保机器人的精确动作控制和故障诊断。
第三章“码垛机器人运动分析”利用了CERO2.0这款先进的三维建模软件,对设计的机器人进行了动态机构仿真。通过CERO2.0的机械设计分析模块,作者实现了对机器人运动轨迹的模拟,验证了机器人在实际工作场景中的运动性能是否符合物流自动化的需求。这一部分的实验结果显示,设计的码垛机器人能够高效、准确地完成任务,满足工业现场的高精度和高效率要求。
总结起来,本文是一份全面的码垛机器人机械结构设计文档,涵盖了从市场需求分析、机械设计到运动性能验证的全过程,展现了CERO2.0在现代机器人设计中的应用价值。通过阅读这篇文档,读者可以了解到如何根据具体需求设计出能满足物流自动化高标准的码垛机器人,并理解了CERO2.0在机器人设计中的关键作用。关键词“码垛机器人”、“机械设计”和“CERO2.0运动分析”揭示了文章的核心研究内容和方法。
在包装行业,对于码垛机器人的需求主要集中在100~300 kg负载总质量范围
内。而在这一区间里,各品牌一般拥有大小两种规格的机型,且采用统一的外形
尺寸与机械结构,只需替换伺服电机与减速器,即可实现型号间互换。如ABB的
IRB660—180和IRB 660—250、KUKA的KR 100—2 PA和KR180—2PA、FUANC的M一410iB
/160M一410iB/30OKAWASAKI的ZD130S和ZD250S等。
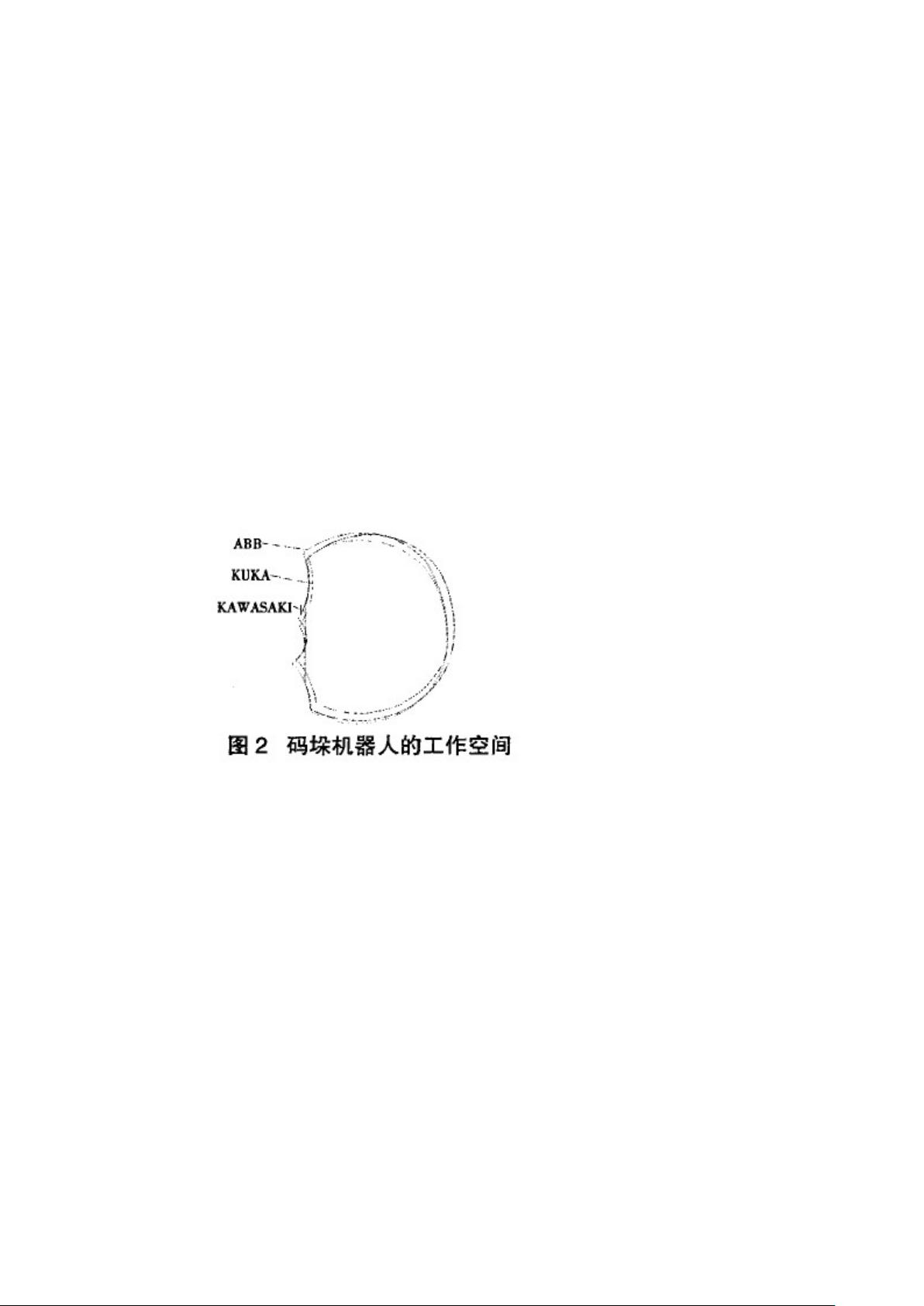
1.3.2 工作空间
工作空间指机器人末端可在空间到达的最大范围。图2是ABB的IRB660—180、
KUKA的KR 180—2PA和KAWASAKI的ZD130S工作空间的叠加图。可以看出,各款机器
人的工作空间基本重合,大致反映了市场的实际需求(托盘尺寸、垛堆高度等)。
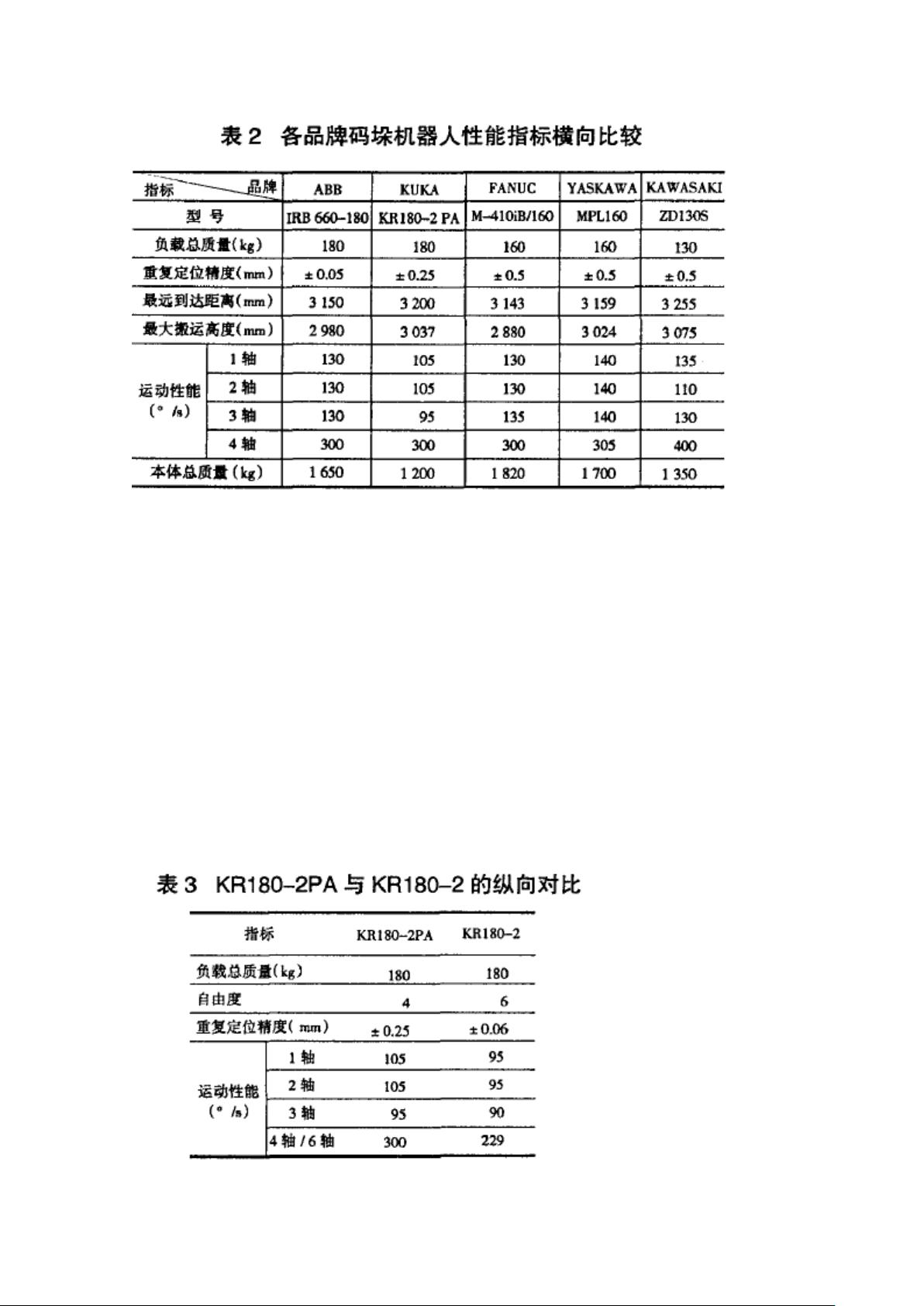
表2将各品牌码垛机器人对应型号的性能指标进行了横向比较,从中可以发现
码垛机器人性能指标的共性 ;表3则以KUKA为例,将码垛机型KR180—2PA与其对应
的通用机型KBl80—2进行了纵向比较 ,凸显了码垛机器人不同于通用型机器人
的性能特点。表2中,数款机器人的最远到达距离,都约为3 200 mm,而最大搬运
高度约为3 000 mm。
剩余30页未读,继续阅读
相关推荐




omyligaga
- 粉丝: 102
 我的内容管理
展开
我的内容管理
展开








最新资源
- 中小企业工资系统开发实战:C# 2005与SQL2000的应用
- 探索折半查找算法在整型数组中的应用
- _velocity核心jar包及版本详细列表解析_
- pb9豪华界面主程序设计:新颖且可扩展
- 基追踪算法实现去噪的Matlab库
- Mac开发环境快捷操作配置指南
- 浅谈IT技术在实际开发中的应用与工具
- 掌握企业级数据库管理利器DBArtisan v8.6.1
- 使用MATLAB成功加载并修改PLY格式文件
- MATLAB实现基于Hu不变矩的图像检索算法及其操作演示
- SSE指令集高级优化技巧详解手册
- 《信号与系统》第二版答案解析集
- VC开发中进程操作:枚举、关闭及获取进程ID
- Cesium的dae转gltf工具:三维模型转换新方法
- 搭建首个Django Todo应用的简单指南
- Android性能监控全链路接入示例
