智能搬运机器人设计与实现
下载需积分: 50 | PDF格式 | 1.43MB |
更新于2024-07-17
| 162 浏览量 | 举报
"智能搬运机器人设计.pdf - 描述了智能搬运机器人的设计过程,包括智能车的整体装配图绘制、电路图和流程图的编制,以及机电专业的课程设计内容。涉及LabVIEW技术,主要讨论了手爪和翻斗的设计方案,以及相关传动方案的选择。"
在智能搬运机器人设计中,关键组成部分包括智能车手爪和翻斗,这两部分的设计至关重要。首先,手爪的设计要求承载能力为5牛顿,能够抓取D30×H40mm的工件,重量限制在5N以内,手爪可张合角度为30-180度,与地面垂直距离至少100mm,中心伸出长度为60mm。此外,手爪采用步进电机驱动,要求电机扭矩为0.32KN*m,步距角1.8度,工作转速范围为60~200rpm,频率200~700HZ,且只需一个自由度。在传动方案上,经过分析,团队选择了电机直接驱动平面曲柄机构的方案,因为这种方式成本低、结构简单、灵活性好,且能满足设计需求。
对于智能车的翻斗设计,提出了三种方案:皮带带动轮、凸轮机构和四连杆机构。皮带方案简洁易实现,但负载能力有限;凸轮方案简单但可能需要大直径的凸轮;四连杆机构则可以减轻电机负载并保持稳定运行。最终,考虑到成本和实用性,选择了皮带带动轮的方案。翻斗的主要任务是等待物料进入,行进至指定位置后翻转卸料。
在检测装置方面,设计团队利用黑白循迹传感器来判断智能车是否到达物料位置。这种传感器能够识别黑白线,从而帮助智能车精准地定位和导航。除此之外,流程图和软件的编制也是整个项目的重要环节,这可能涉及到LabVIEW编程,用于控制系统的逻辑控制和数据处理,确保机器人能够根据预设程序准确执行搬运任务。
整个设计过程中,团队成员分工明确,指导教师提供了专业指导。项目涵盖了从方案选择、设计、绘图到实际制作与调试的全过程,是机电专业课程设计的一个综合实践案例,体现了理论知识与实际操作的结合,对于提升学生们的工程实践能力具有重要意义。
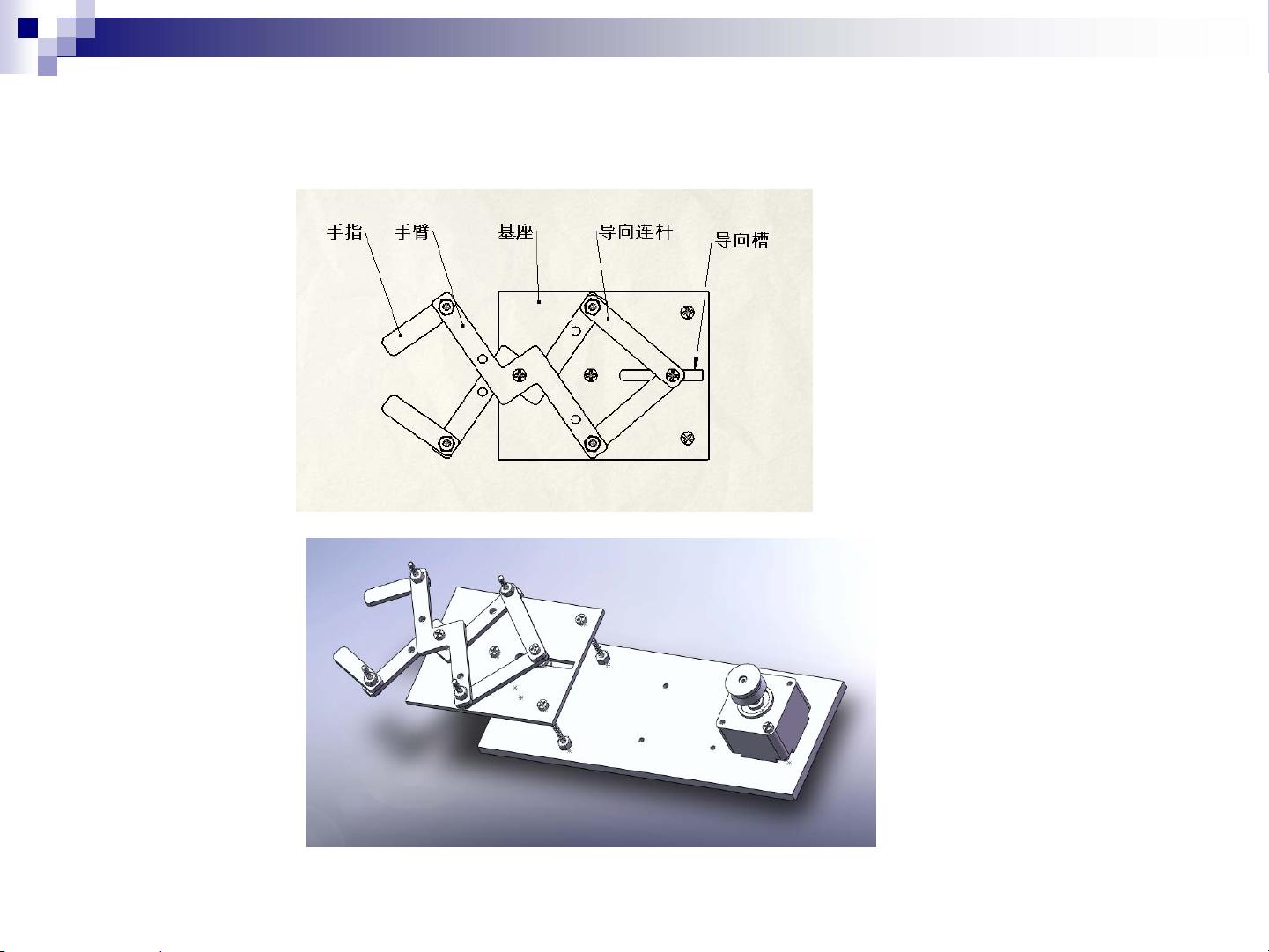
下图所示为手爪模型
剩余35页未读,继续阅读
相关推荐


weixin_38744270
- 粉丝: 329
 我的内容管理
展开
我的内容管理
展开







最新资源
- GNU链接器ld使用指南
- 精通GNU工具集:Autoconf、Automake与autotools详解
- 构建自己的网络安全实验室:网络测试实战指南
- SQLServer学生信息管理系统设计:需求分析与实体关系
- 开关电源设计关键因素分析
- 面向对象应用软件系统框架设计与实践
- 快速入门UCOS-II:在PC上搭建与运行示例
- 非线性滤波器设计优化方法
- 最优滤波理论专著:数据压缩与通信系统的关键
- 操作系统详解:管理与控制计算机资源
- C语言在嵌入式系统编程中的应用与技巧
- 高阶Perl:编程思维革命的经典之作
- 微波技术实验教程:从理论到实践
- JavaFX:打造丰富的移动应用程序
- GNUmake中文手册:构建与理解
- JavaFX技术深度探索:控件与布局指南
