陈梓杰第六章作业:多方法优化与数据保存
需积分: 0 182 浏览量
更新于2024-08-05
收藏 2.09MB PDF 举报
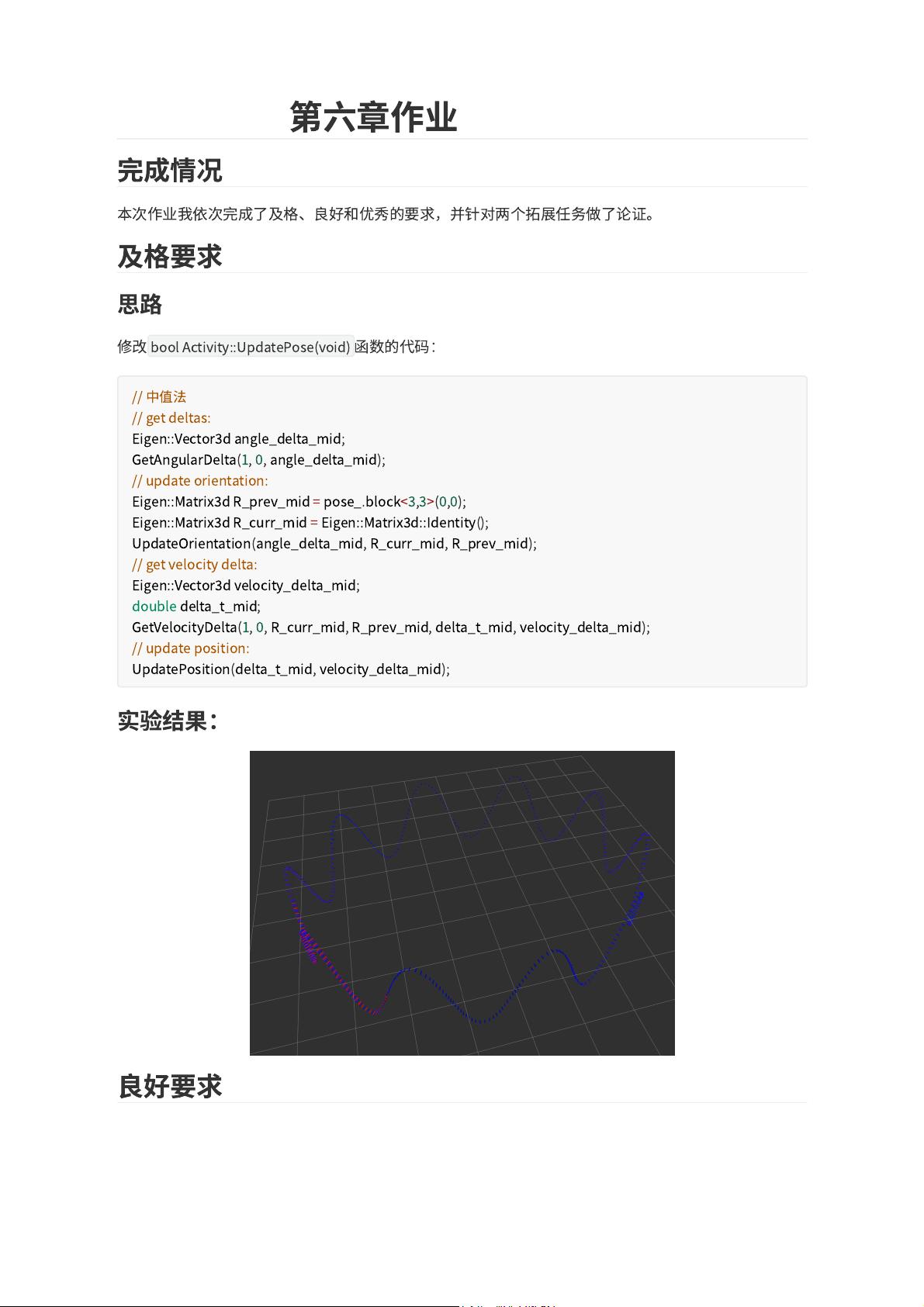
在CHENXXX同学的第六章作业中,他全面展示了在高级编程与机器人控制理论方面的技能。作业涉及的主要内容包括对基础函数bool Activity::UpdatePose(void)的改进,以及两个扩展任务的实现。首先,对于及格要求,他优化了UpdatePose函数,通过中值法计算角度和速度变化,分别更新了姿态矩阵(R_curr_mid)和位置,实现了更精确的运动更新。
在良好要求部分,陈梓杰引入了欧拉角的处理方式,增加了GetAngularDeltaEuler和GetVelocityDeltaEuler两个新函数。GetAngularDeltaEuler用于获取基于欧拉角的旋转增量,而GetVelocityDeltaEuler则负责根据当前和前一状态的欧拉矩阵来计算速度变化。这些新函数的加入,不仅提升了代码的灵活性,还考虑到了不同的旋转表示形式,有助于提高计算精度。
为了完整地记录和分析实验结果,他还增加了保存数据的相关代码,这在数据分析和后续的调试中至关重要。这种细致入微的工作态度显示了他在算法实现上的严谨性和对数据处理的熟练度。
在优秀标准下,陈梓杰可能对原有功能进行了进一步优化,可能涉及到性能提升、错误处理或算法优化等方面,但具体实现未在给出的部分详述。然而,从提供的代码片段可以看出,他已经具备了深入理解并灵活运用机器学习和控制理论的能力,这对于提升机器人的动态行为控制具有重要意义。
CHENXXX同学的第六章作业展示了他对C++编程、机器人姿态控制和数据处理的扎实基础,以及在实际问题中的创新思考和解决能力。通过这次作业,他不仅巩固了理论知识,也锻炼了自己的实践操作和技术迁移能力。
CHENXXX
第
六
章
作
业
完
成
情
况
本
次
作
业
我
依
次
完
成
了
及
格
、
良
好
和
优
秀
的
要
求
,
并
针
对
两个
拓
展
任
务
做
了
论证
。
及
格
要
求
思
路
修
改
bool Activity::UpdatePose(void)
函
数
的
代
码
:
实
验
结
果
:
良
好
要
求
//
中
值
法
// get deltas:
Eigen::Vector
d angle_delta_mid;
GetAngularDelta(1, 0, angle_delta_mid);
// update orientation:
Eigen::Matrix
d R_prev_mid = pose_.block<3,3>(0,0);
Eigen::Matrix
d R_curr_mid = Eigen::Matrix
d::Identity();
UpdateOrientation(angle_delta_mid, R_curr_mid, R_prev_mid);
// get velocity delta:
Eigen::Vector
d velocity_delta_mid;
double delta_t_mid;
GetVelocityDelta(1, 0, R_curr_mid, R_prev_mid, delta_t_mid, velocity_delta_mid);
// update position:
UpdatePosition(delta_t_mid, velocity_delta_mid);
下载后可阅读完整内容,剩余7页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2022-08-03 上传
2022-08-03 上传
2022-08-04 上传
2022-08-03 上传
2022-08-03 上传
2020-06-26 上传

独角兽邹教授
- 粉丝: 39
- 资源: 320
 我的内容管理
展开
我的内容管理
展开







最新资源
- 基于Python和Opencv的车牌识别系统实现
- 我的代码小部件库:统计、MySQL操作与树结构功能
- React初学者入门指南:快速构建并部署你的第一个应用
- Oddish:夜潜CSGO皮肤,智能爬虫技术解析
- 利用REST HaProxy实现haproxy.cfg配置的HTTP接口化
- LeetCode用例构造实践:CMake和GoogleTest的应用
- 快速搭建vulhub靶场:简化docker-compose与vulhub-master下载
- 天秤座术语表:glossariolibras项目安装与使用指南
- 从Vercel到Firebase的全栈Amazon克隆项目指南
- ANU PK大楼Studio 1的3D声效和Ambisonic技术体验
- C#实现的鼠标事件功能演示
- 掌握DP-10:LeetCode超级掉蛋与爆破气球
- C与SDL开发的游戏如何编译至WebAssembly平台
- CastorDOC开源应用程序:文档管理功能与Alfresco集成
- LeetCode用例构造与计算机科学基础:数据结构与设计模式
- 通过travis-nightly-builder实现自动化API与Rake任务构建
